Da tempo sperimento l’escape game nelle attività di laboratorio: è una modalità estremamente coinvolgente, orienta l’attenzione all’obiettivo, aumenta la concentrazione e riduce il rumore non costruttivo. Quello che si sente in aula è il brusio utile di chi discute, prova, sbaglia e ci riprova per risolvere un problema. La sfida di questi mesi è renderla significativa anche per studenti un po’ più grandi, con competenze tecniche talvolta “disordinate” e bisogno di nuova motivazione.
Capisco che qualcuno possa considerarla una scelta poco adatta a un istituto tecnico, richiamando l’idea che la scuola debba puntare solo su abilità pratiche e nozioni da trasferire in vista del lavoro o dell’università. A mio avviso è una visione superata: la scuola è cambiata, gli studenti sono diversi, né peggiori né migliori di “noi”, i ragazzi vivono in un mondo che offre moltissimo, ma spesso lascia poco spazio alla creatività o, meglio, non la allena. Non devo convincere nessuno: da insegnante sento la responsabilità di cercare strategie efficaci per aiutare i ragazzi e, insieme ai colleghi, fornire loro gli strumenti per diventare cittadini consapevoli. Questo post è il mio diario di bordo: metto per iscritto ciò che sperimento in classe per farne memoria e, se può essere utile, per condividerlo.
Dopo aver progettato escape analogiche, digitali e fisiche, voglio consolidare l’approccio nella didattica curricolare. Comincio da qualcosa di semplice: un escape “ice breaking” di inizio anno. Quella che segue è l’attività, volutamente essenziale; se l’esperimento continuerà a funzionare, pubblicherò anche le prossime tappe.
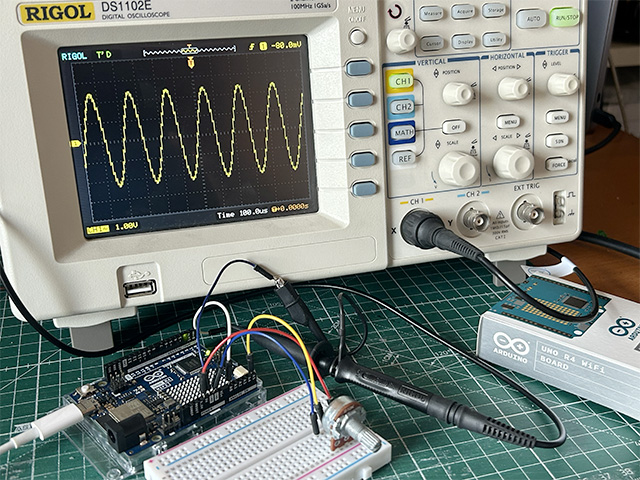
Siamo all’inizio dell’anno scolastico, come dicevo sopra, ho rimodellato il mio “ice breaking” per il laboratorio di sistemi trasformandolo in una breve esplorazione individuale in stile escape. Nell’attività l’obiettivo non è “programmare bene”, ma osservare come gli studenti cercano informazioni, leggono testi tecnici e narrativi, e trasferiscono ciò che capiscono in un prodotto visivo semplice. Ho scelto un oggetto per loro nuovo, mi sono concentrato sulla matrice 12×8 dell’Arduino UNO R4 WiFi, ho creato una piccola situazione di disorientamento produttivo: un compito che per la loro fascia di età è elementare, però non è mai stato affrontato, da risolvere attingendo esclusivamente alla documentazione ufficiale sul sito Arduino.cc. La sequenza di indizi li ha costretti a leggere con attenzione, a verificare i prerequisiti, a selezionare ciò che serviva e a ricomporre la soluzione anche con un po’ di “copia e incolla consapevole” dagli strumenti ufficiali (come l’Editor della matrice). Chiudendo il percorso, ogni studente ha mostrato il simbolo di sblocco sulla matrice di LED ed ha guadagnato il badge, successivamente siamo passati ad un breve debrief collettivo in cui abbiamo esplicitato strategie efficaci, fraintendimenti e punti chiave tecnici per giungere alla consapevolezza di non avere completa dimestichezza nelle tecniche per risolvere un problema.
L’attività si è svolta in circa 90 minuti di lavoro, nella parte introduttiva ho dato alcune indicazioni operative dopo di che ho osservato e preso appunti sul loro modo di operare e farmi un’idea più precisa delle loro capacità.
Vi condivido l’attività che spero possa essere migliorata.
Materiali necessari per ogni allievo
- N.1 scheda Arduino UNO R4
- N. 1 PC per allievo
- N. 1 Sito per creare l’escape game realizzato con Google Site, trovate il link al fondo di questo post.
Scheda di presentazione dell’attività didattica (per il docente/formatore)
“Sblocca il laboratorio” è un escape game didattico con ingresso morbido e motivante nell’ecosistema Arduino UNO R4 WiFi: lo studente deve mostrare un Simbolo di Sblocco sulla matrice 12×8 integrata sulla scheda, ma la chiave non è “scrivere codice da zero”; è trovare, capire e applicare le informazioni giuste dentro la documentazione ufficiale. L’attività allena così la ricerca dell’informazione tecnica (orientarsi tra Getting Started, Tutorial, Hardware; scegliere un esempio pertinente ed utilizzare l’editor della matrice), la comprensione del testo narrativo (tradurre la storia-missione in azioni concrete e verificabili) e la comprensione del testo tecnico (prerequisiti come installazione driver, concetti essenziali della LED Matrix, flusso operativo “disegna > esporta > carica”). In classe tutto ciò si traduce in problem solving consapevole: riconoscere i punti critici, correggere il percorso, giustificare le scelte di fonte e di metodo.
Funziona bene anche con gruppi fragili o demotivati perché il feedback è immediato. Lo scaffolding è naturale: la documentazione guida passo dopo passo e l’editor di icone riduce il carico cognitivo mantenendo il controllo del risultato. Il compito rimane breve, chiaro e gratificante: un unico output visivo con criteri di riuscita espliciti, abbastanza sfidante da dare senso alla ricerca, ma sufficientemente accessibile da permettere a tutti di arrivare in fondo e raccontare come ci sono arrivati. In questo modo la valutazione non riguarda solo l’esito, ma la qualità del percorso: dove hanno cercato, cosa hanno capito, come lo dimostrano.
Sito Escape per svolgere l’attività: “sblocca il laboratorio”
Se serve ho realizzato una versioni in lingua inglese del gioco escape in modo che si posa realizzare un’attività trasversale tra l’insegnamento dell’inglese e la disciplina tecnica, il link al sito è:
Attenzione il badge è nascosto come link (il colore del testo si confonde con lo sfondo pagina) nell’ultima pagina, questa informazione deve essere fornita agli studenti solamente quando hanno mostrato il codice sulla matrice LED dell’Arduino R4.
Buon lavoro 🙂