
Sto ricevendo diverse mail da colleghi che mi chiedono quali materiali acquistare affinché possano produrre insieme a me durante il corso gli stessi robot che andremo prima a progettare e poi costruire.
L’idea, come esposta nella presentazione del corso, è quella di creare qualcosa a bassissimo costo con materiali economici.
Io vi mostrerò come progetto e come ho progettato alcuni kit che ho utilizzato per i miei allievi che ho poi modificato nella struttura per renderli più semplici da assemblare da parte di utenti che non hanno mai affrontato queste sperimentazioni.
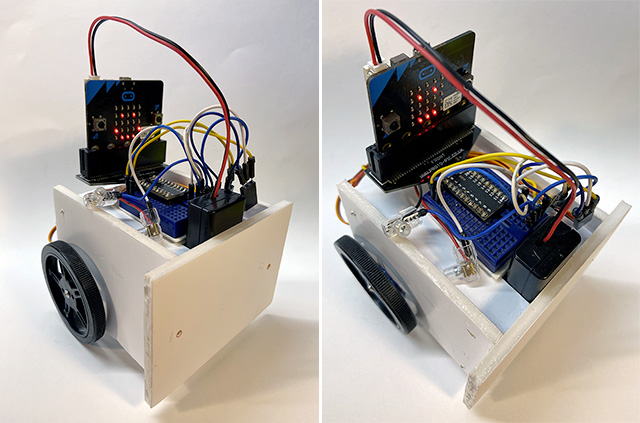
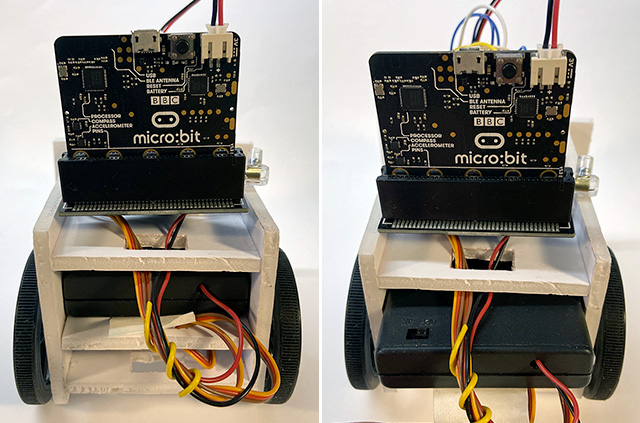
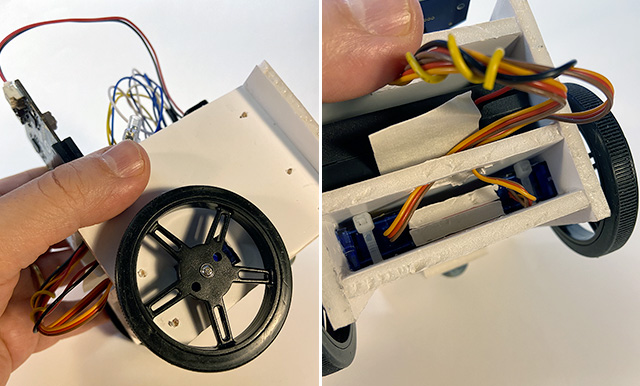
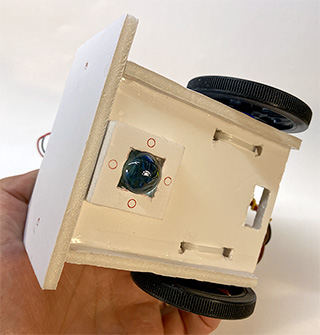
Partirò dalla realizzazione di una struttura realizzata in Foam Core su cui disporremo dei servomotori a rotazione continua il tutto controllato da un micro:bit che programmeremo per far fare semplici movimenti al robot. Successivamente vi mostrerò come controllare remotamente il robot mediante un secondo micro:bit. Successivamente aggiungeremo qualcosa per rendere il robot autonomo nei movimenti e cercare il più possibile di evitare ostacoli.
Questo che vedete di seguito è uno dei prototipi realizzati per preparare il corse, ne saranno mostrati anche altri e molto probabilmente vi proporrò anche altre soluzioni di piccoli bracci robot ed insetti robot, nel caso i tempi non consentissero di mostrare tutti i progetti lascerò ai corsisti i sorgenti grafici per la realizzazione.
Vi mostrerò inoltre come realizzare una struttura diversa interamente stampata in 3D simile a quelle che trovate nella sezione BBC micro:bit di questo sito.
Di seguito la lista dei materiali per poter realizzare il robot mostrato sopra.
Potete trovate i materiali su diversi store online.
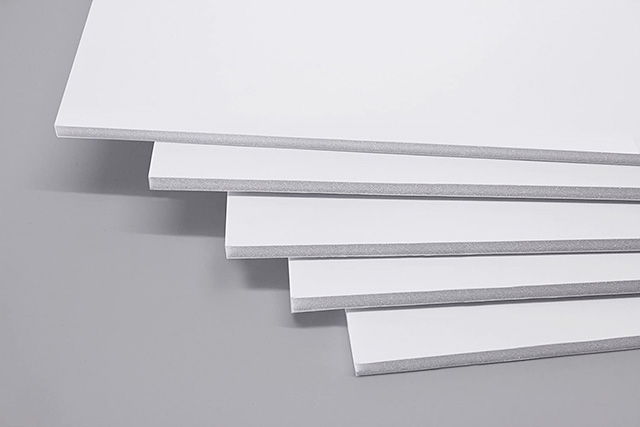
- Foma Core da 5 mm
(pannello costituito da una struttura a sadwitch costituito da due superfici di carta rigida e una parte centrale di spugna)
- Colla vinilica
- Stuzzicadenti
- Carta adesiva bianca formato A4
- 2 Cappellotti piccoli da (sezione filo 1,5 mm^2) oppure un mammut da 3A

- Contenitore 4 batterie AA con interruttore

- 2 micro servomotori a rotazione continua (360°) a cui connetteremo le ruote
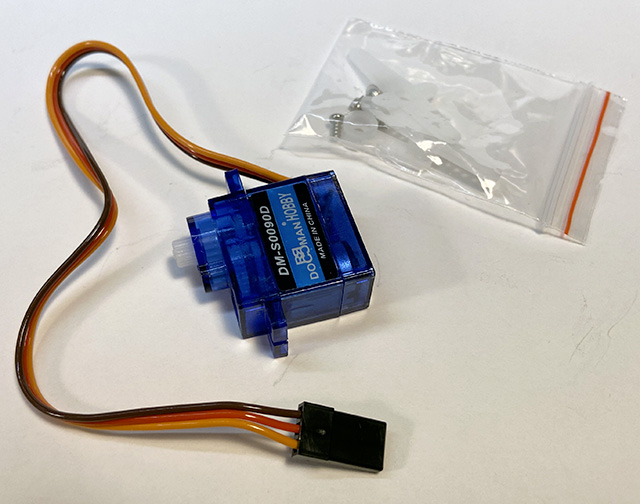
- 2 ruote da 60 mm per servomotori

- 1 biglia di vetro da 15 mm

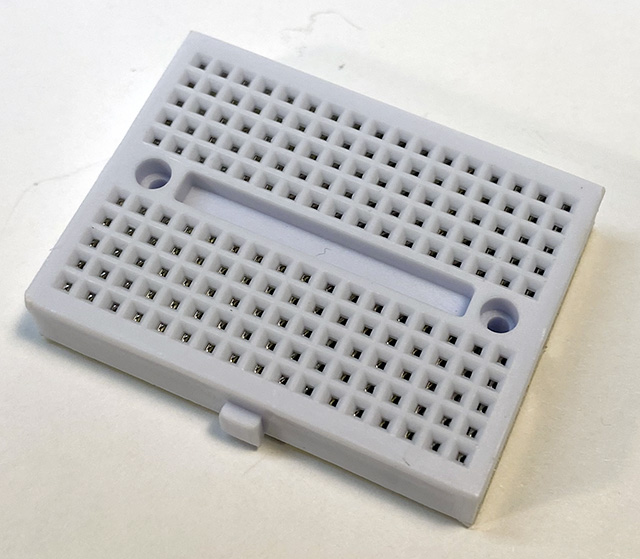
- 1 mini breadboard da 170 punti
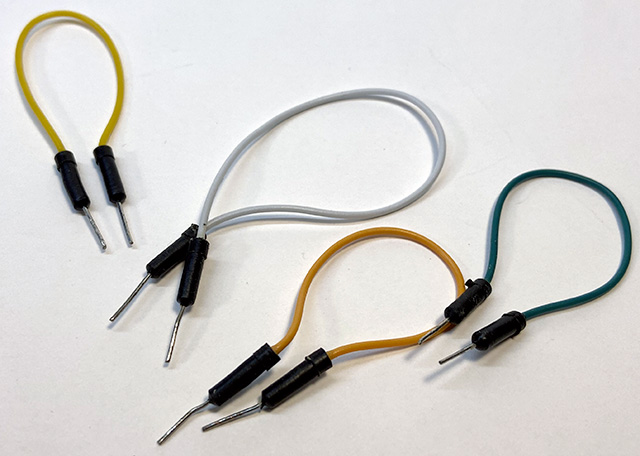
- jumper corti maschio/maschio (fili da usare per la breadboard)
in alternativa filo elettrico AWG 22 oppure un pezzo di cavo di rete che dovrete sguainare e ricavarne dei pezzi di filo
- Jumper maschio femmina

- 4 batterie AA da 1,5V (da utilizzare per alimentare i servomotori)
- 2 batterie AAA 1,5 V (per l’alimentazione del micro:bit, già comprese nel kit base di micro:bit)
- 1 contenitore per le due batterie da 1,5V AAA (già comprese nel kit base di micro:bit)
- Fascette elettriche da 2mm
- 1 kit micro:bit base V1 oppure V2

- Edge Connector Breakout Board per micro:bit

- Sensore ad ultrasuoni HC-SR04
- opzionale – Kitronik Servo:Lite board (che potrà essere utilizzati con progetti simili a quelli indicati nella sezione BBC micro:bit di questo sito)

Se sarà possibile mostrerò una soluzione per realizzare robot che utilizzano motori più potenti, ma per questo tipologia di progetto sarà necessario avere un po’ più di dimestichezza nella realizzazione di semplici circuiti elettronici e disporre di un saldatore elettrico a stagno, ovviamente vi lascerò tutte le indicazioni tecniche per svolgere in autonomia questa seconda tipologia di robot
- 2 motori elettrici in CC 3-6V
a cui verranno collegate le ruote
- 2 ruote per motori elettrici 3-6V

- 1 ponte H L298N
Vi aspetto al corso per fare insieme una rilassante attività di making 🙂