Quattro valigette componibili, basate su making, gamification, sensori e AI, per realizzare attività personalizzabili per ogni classe e disciplina.

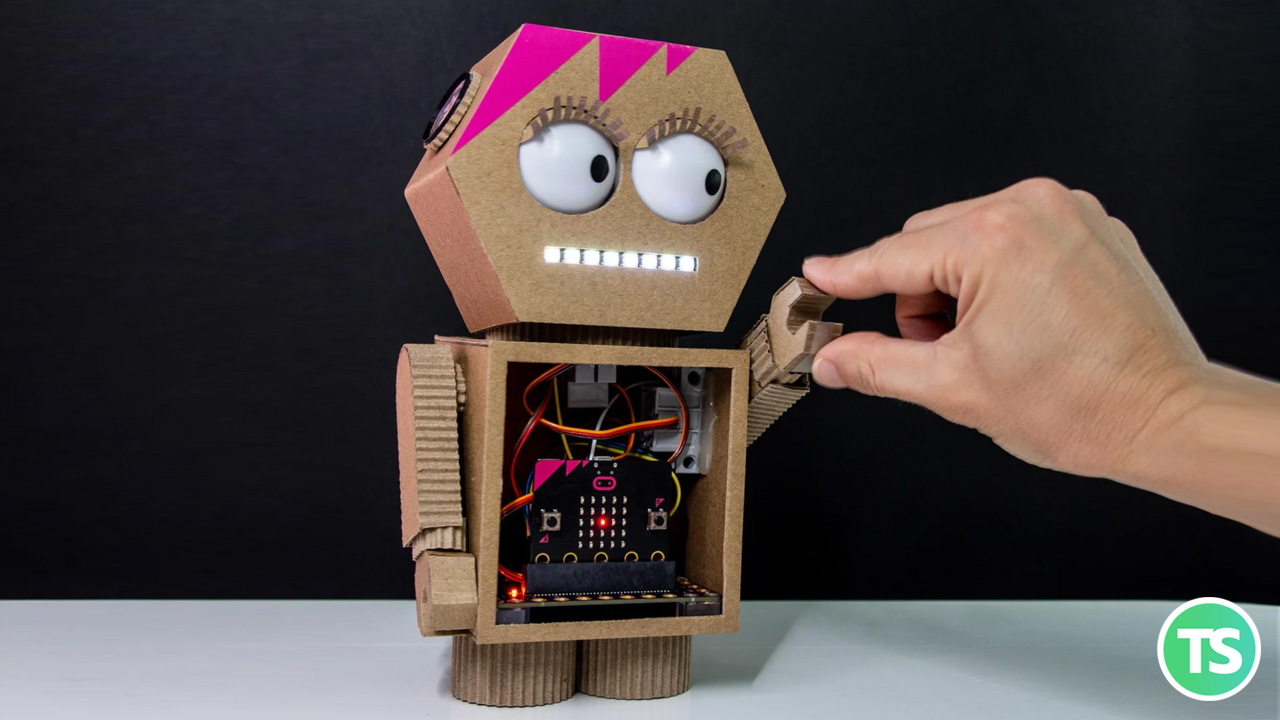
STEAM-BOX è un corso online dedicato ai docenti della secondaria di I e II grado che trasforma una semplice valigetta di cartone in un vero laboratorio STEAM portatile. Partendo dal making e arrivando a sensori, robotica, piccole applicazioni di intelligenza artificiale “leggera” e dinamiche di gioco/escape, il percorso mostra come progettare attività coinvolgenti e personalizzabili per qualsiasi disciplina, anche senza competenze tecniche avanzate. Sono previsti 4 incontri in webinar (per un totale di 8 ore), con materiali operativi, template e schede riutilizzabili direttamente in classe.
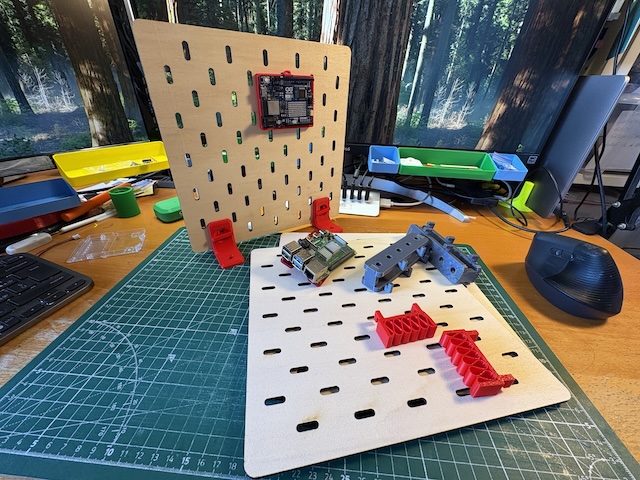
Durante il corso i partecipanti impareranno a progettare e costruire la propria valigetta: struttura in cartone rinforzata, pannello frontale modulare con LED, pulsanti e jack per sensori, coperchio “attivo” per puzzle e meccanismi di gioco. Da lì si passerà a esempi concreti di attività: micro-indagini con sensori e data logging, piccole sfide di robotica “dal coperchio”, escape room analogico-digitali e utilizzo consapevole dell’IA in classe, con particolare attenzione all’inclusione, alla valutazione formativa e alla documentazione del lavoro degli studenti.
Dietro le quinte 🙂
Progetto HÉLIOS – Faro Stratosferico
Siamo nel 2076, un faro stratosferico (Faro N-7) è fuori uso e solo una console remota può riattivarlo. Ogni gruppo di studenti controlla un modulo diverso della console (Energia, Calibrazione, Stabilità, Segnale, Sicurezza, Sincronismo). A ciascun gruppo viene assegnata una Carta-Quesito collegata a una specifica tematica della disciplina scelta dal docente (es. fisica, storia, lingue, ecc.): se la risposta è corretta, il gruppo imposta il proprio interruttore su ON, altrimenti lo lascia su OFF. Inserita la chiave nel pannello SYSTEM ACTIVATION e premuto START, gli studenti hanno poco tempo per coordinarsi e, alla fine, premere CHECK: se tutti i moduli sono nella configurazione giusta, il sistema HÉLIOS si riavvia; in caso contrario, avranno un secondo e ultimo tentativo prima dell’arresto di sicurezza.
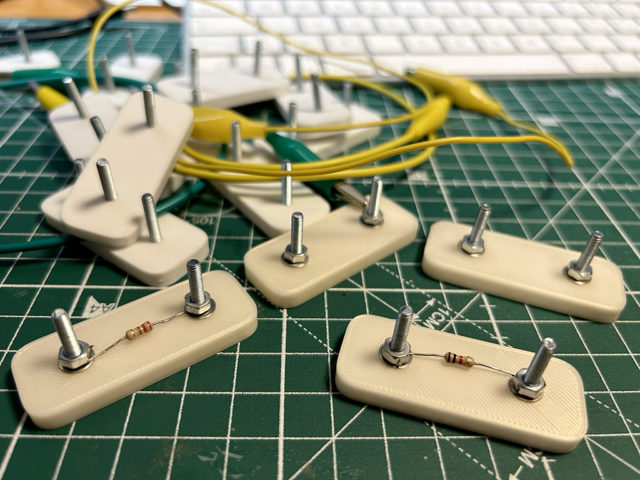
Questa è solo una delle tante attività che verranno presentate: durante il corso vedremo come costruire meccanismi simili anche con materiali poveri (carta, cartone, pulsanti, interruttori, lampadine) e, quando utile, con piccola elettronica low-cost, così che ogni docente possa adattare facilmente le idee alla propria realtà di classe.
Calendario del corso
- Martedì 25 novembre 2025 – Dalle 17.00 alle 19.00
- Mercoledì 3 dicembre 2025 – Dalle 17.00 alle 19.00
- Martedì 9 dicembre 2025 – Dalle 17.00 alle 19.00
- Mercoledì 17 dicembre 2025 – Dalle 17.00 alle 19.00
Per maggiori informazioni sul programma e l’iscrizione seguite il LINK.
Vi aspetto 🙂
 In laboratorio sicurezza = metodo + ordine. Un prototipo ben organizzato non è solo più “bello”: è più sicuro, più facile da testare e più veloce da riparare. Lavoriamo con alimentazioni, correnti, componenti sensibili: le buone abitudini proteggono persone, strumenti e risultati.
In laboratorio sicurezza = metodo + ordine. Un prototipo ben organizzato non è solo più “bello”: è più sicuro, più facile da testare e più veloce da riparare. Lavoriamo con alimentazioni, correnti, componenti sensibili: le buone abitudini proteggono persone, strumenti e risultati.