

Di recente ho scoperto che nella scuola presso cui lavoro sono presenti una serie di Lego Minstroms NXT 2 e come credo sappiate questa versione non può essere più programmata utilizzando l’ultima versione dall’IDE grafico di Lego, quello che attualmente viene utilizzato per per la versione EV3.
In questi giorni ho ripreso in mano la vecchia versione del mattoncino per capire come recuperarlo ed utilizzarlo in ambito didattico. In passati articoli su questo blog avevo segnalato tutti i possibili linguaggi di programmazione che possono essere utilizzati con tutte le versioni di Mindstorms, tra questi però prediligo il linguaggio C in quanto i miei allievi devono utilizzarlo in altri ambiti: microcontrollori, PIC ecc… quindi un primo passo potrebbe essere quello di imparare a programmare in C realizzando robot con l’NXT 2.
Premessa importante.
On-line trovate una serie di tutorial per usare il vecchio mattoncino, alcuni consigliano di utilizzare addirittura Windows XP su un vecchio PC o su PC virtualizzato, ovvimente io sconsiglio vivamente questa strategia soprattutto perchè da anni Microsoft non supporta più XP ed inoltre mina seriamente la sicurezza del computer (virus).
Prelevate dal link indicato di seguito l’ultima versione dell’NXT-G rilasciata dalla Lego al cui interno sarà già presente il driver corretto per il vostro sistema operativo Windows 10, driver che per altro sarà indispensabili per chi intende anche programmare in C il mattoncino. Nello stesso link trovate i riferimenti per gli utenti MacOS X.
Nel caso abbiate sul vostro computer una versione precedente dell’NXT-G non più funzionate potete procedere alla sola installazione del driver NXT Fantom Driver che risolve una serie di problemi di comunicazione, inoltre questo driver permetterà di sistemare tutti i problemi che si hanno con altri ambienti di sviluppo come: LejOS, RobotC, ecc…
Pagina di riferimento per il download
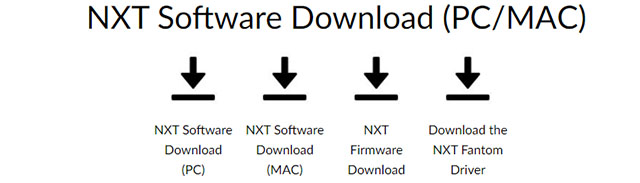
Windows 10
- NXT Software Download (PC) – Versione v2.0f6
- NXT Fantom Driver v120
- NXT Firmware Download
MacOSX
Veniamo ora all’ambiente di sviluppo in C.
Vi consiglio di utilizzare Bricx Command Center (BricxCC) ambiente Open Source adatto per tutte le versioni Mindstorms: RCX, NXT ed EV3. L’IDE di programmazione funziona per tutte le versioni di Window a 64 bit.
Nella pagina trovate il link “latest version” che NON dovete prendere in considerazione in quanto vi rimanda ad una serie di versioni NON compatibili con Windows 10.
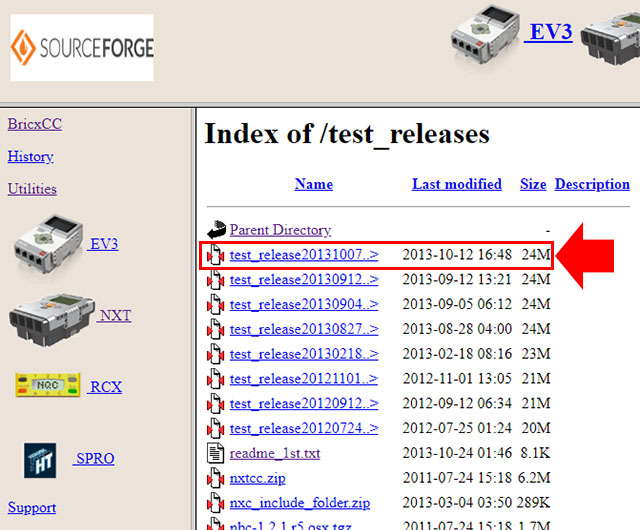
SEGUITE invece il link “test release“, il nome è fuorviante, ma è quello giusto.
Dopo una serie di test ho verificato che la versione corretta è quella che fa riferimento al file: bricxcc_setup_33810_20130220.exe
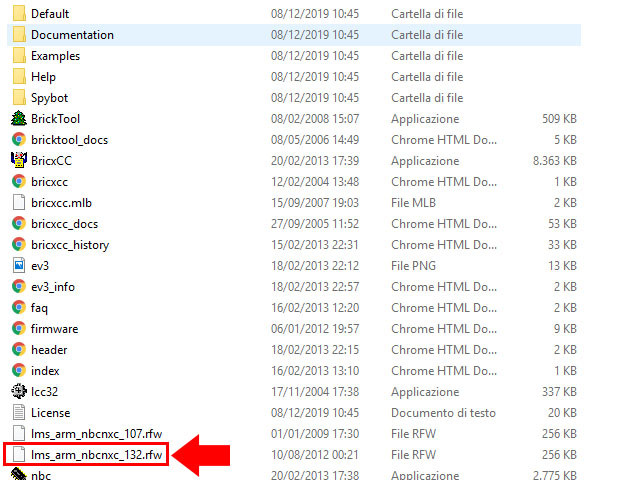
E’ un file autoscompattante, all’interno ritroverete la seguente struttura:
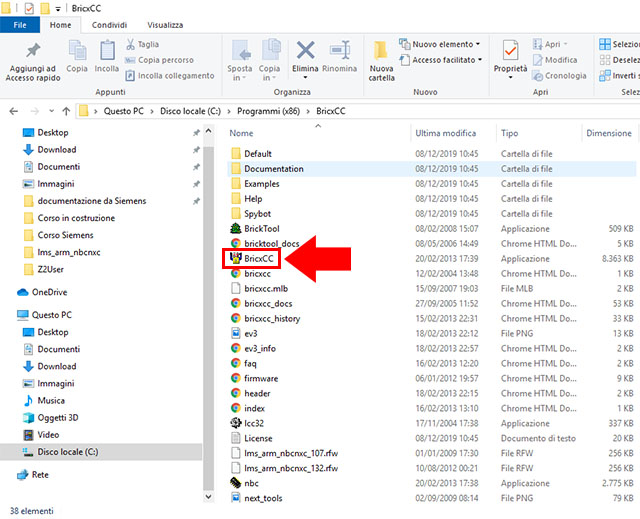
Doppio click sul file BricxCC
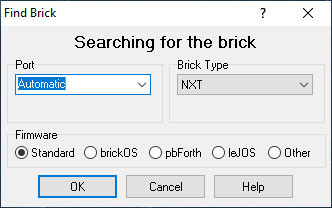
Comparirà la finestra “Find Brick”
Queste le impostazioni:
Port: Automatic
Brick Type: NXT
Firmware: “Standard”
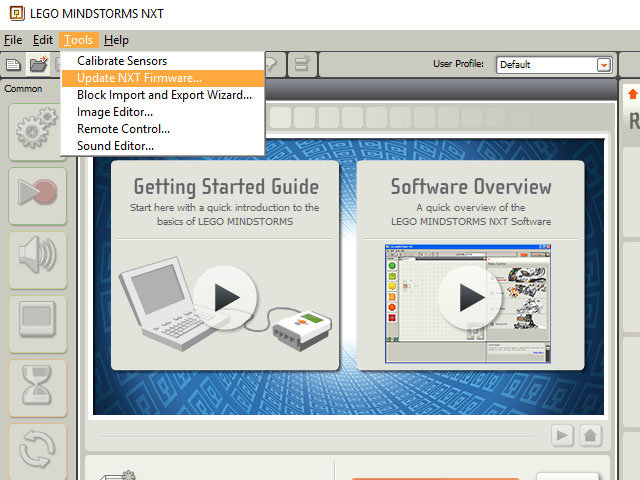
Nel caso abbiate la necessità di caricare l’ultima versione del Firmware sul mattoncino potete procedere in due modi:
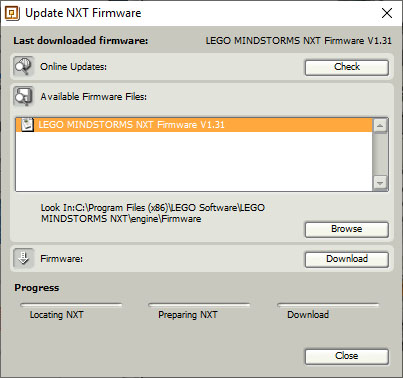
Modo 1 (consigliato): utilizzate NXT-G ed aggiornate il firmware
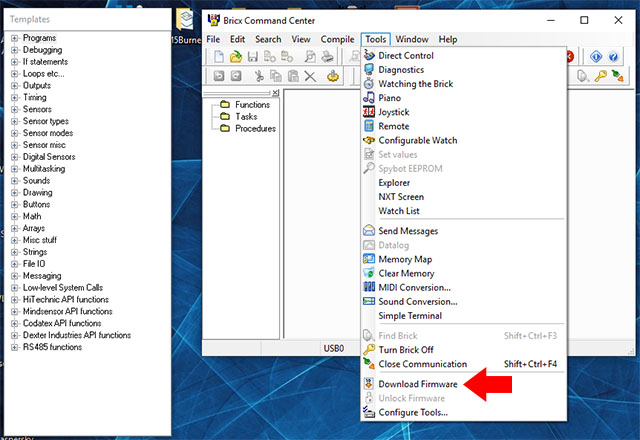
Modo 2: da BricxCC, menù Tools > Download Firmware selezionate l’ultima versione che trovate nella cartella BricxCC: lms_arm_nbcnxc_132.rfw
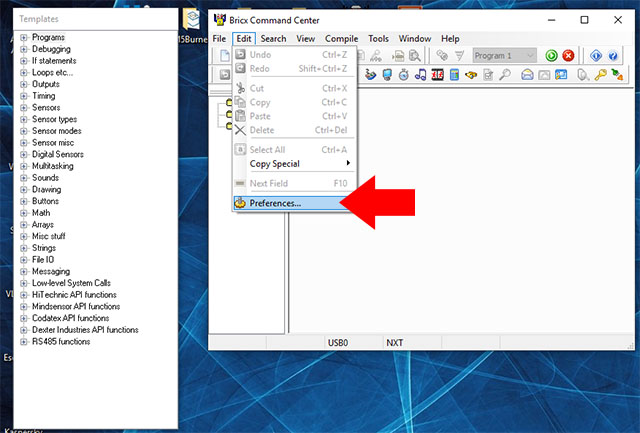
Per quanto riguarda le impostazioni dell’ambiente BricxCC dal menù: Edit > Preferences…
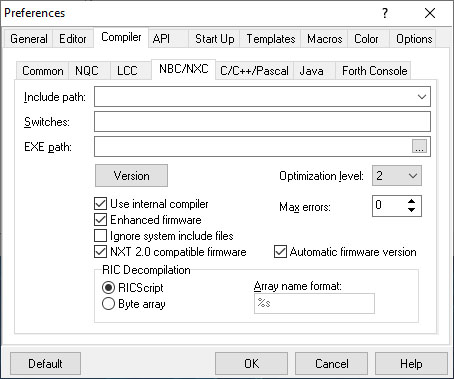
Queste le impostazioni del pannello: Compiler > NBC/NXC
Bene! Il vostro vecchio mattoncino NXT 2 è rinato 🙂 pronto per realizzare tutti i robot che desiderate.
Buon Coding a tutti 🙂

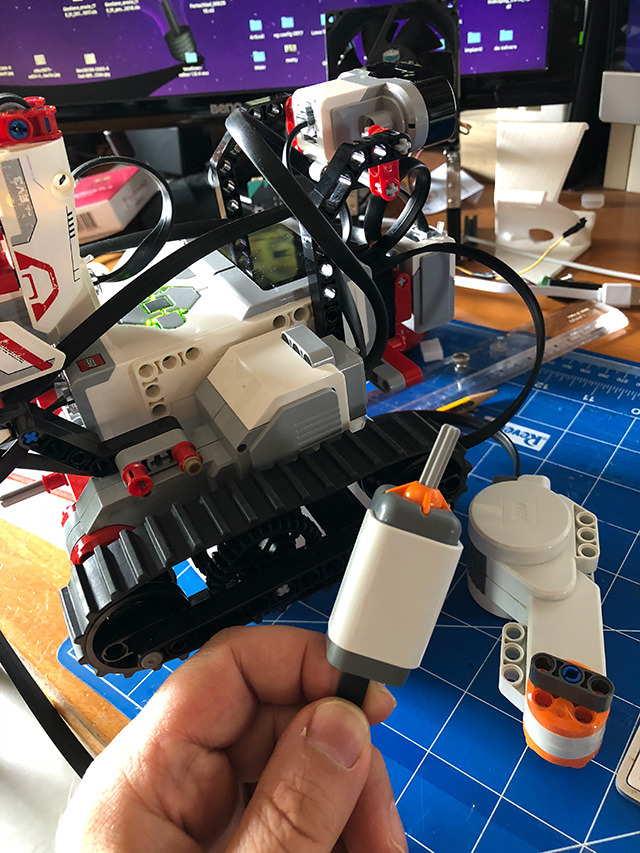
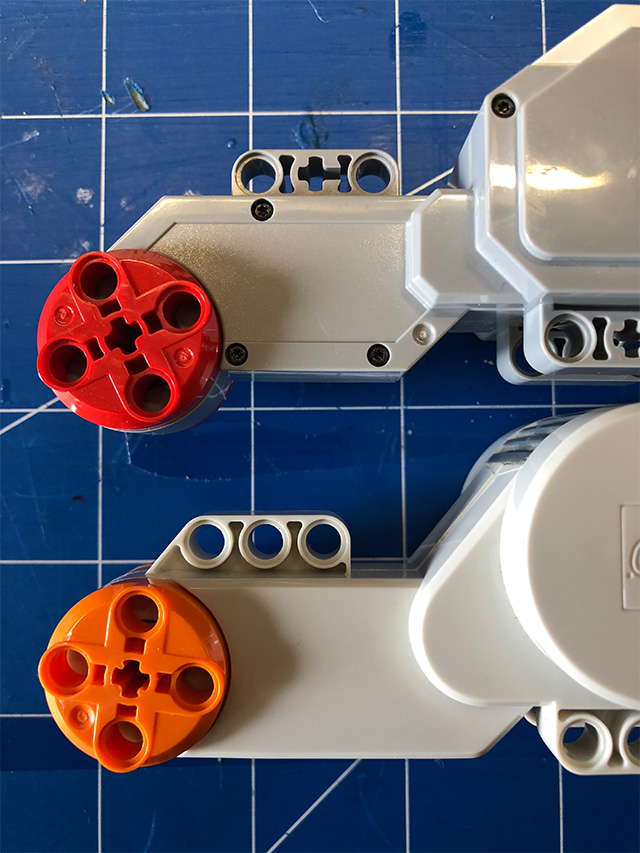
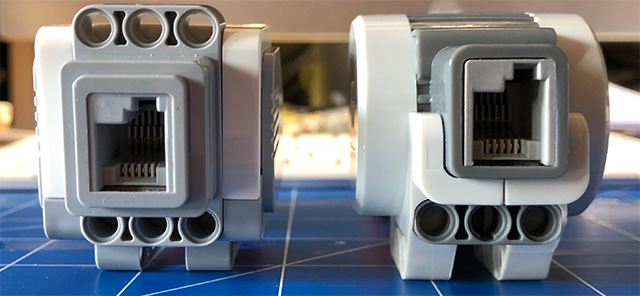
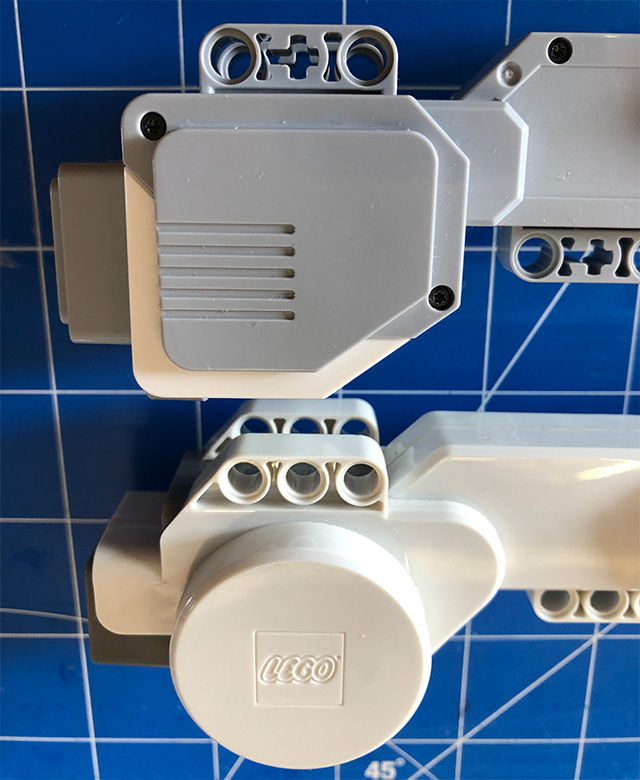
 I due motori hanno circa le stesse dimensioni, però ad un esame più attento, i due motori richiedono procedure di montaggio diverse. Il motore NXT ha tutti i fori arrotondati, mentre i collegamenti del motore EV3 hanno fori arrotondati e trasversali. Il motore EV3 ha anche una fila aggiuntiva di tre fori vicino al connettore elettrico e ciò lo rende più versatile. I fori del motore EV3 sono molto più bassi e alcuni sono addirittura spostati su un lato.
I due motori hanno circa le stesse dimensioni, però ad un esame più attento, i due motori richiedono procedure di montaggio diverse. Il motore NXT ha tutti i fori arrotondati, mentre i collegamenti del motore EV3 hanno fori arrotondati e trasversali. Il motore EV3 ha anche una fila aggiuntiva di tre fori vicino al connettore elettrico e ciò lo rende più versatile. I fori del motore EV3 sono molto più bassi e alcuni sono addirittura spostati su un lato.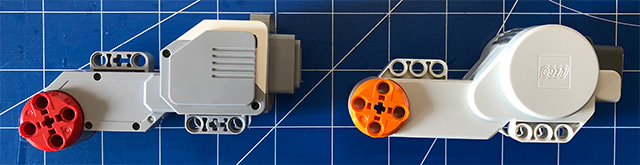
 Bene detto ciò, riapro le vecchie scatole e parto con il Coding su Lego.
Bene detto ciò, riapro le vecchie scatole e parto con il Coding su Lego.