 Durante tutte le attività di formazione che conduco sulle tecnologie didattiche uno dei moduli che svolgo riguarda i metodi di gestione del tempo per lo studio e la progettazione didattica utilizzando software specifici su qualsiasi piattaforma. Come segnalato in passato su queste pagine, gestisco le mie attività lavorative con la tecnica del pomodoro e il metodo GTD. Per quanto riguarda la tecnica del pomodoro, non è obbligatorio utilizzare un software ma tutto può essere fatto comodamente in maniera “analaogica” ed è questa la richiesta che mi è stata fatta poco tempo fa durante uno dei miei corsi per Tecnica della Scuola da parte di colleghi che operano in scuola elementare e media. La necessità per le colleghe era quella di utilizzare un sistema semplice, che potesse essere accolto favorevolmente anche dagli allievi più piccoli e che non facesse uso di dispositivi elettronici. Riflettendo ho trovato una soluzione che è stata provata da alcuni amici insegnanti che mi hanno dato conferma dell’efficacia della soluzione. Per trovare una strategia analogica, divertente, da utilizzare con gli studenti più piccoli è stato sufficiente osservare il disordine sulla mia scrivania 🙂 … i Brick Lego.
Durante tutte le attività di formazione che conduco sulle tecnologie didattiche uno dei moduli che svolgo riguarda i metodi di gestione del tempo per lo studio e la progettazione didattica utilizzando software specifici su qualsiasi piattaforma. Come segnalato in passato su queste pagine, gestisco le mie attività lavorative con la tecnica del pomodoro e il metodo GTD. Per quanto riguarda la tecnica del pomodoro, non è obbligatorio utilizzare un software ma tutto può essere fatto comodamente in maniera “analaogica” ed è questa la richiesta che mi è stata fatta poco tempo fa durante uno dei miei corsi per Tecnica della Scuola da parte di colleghi che operano in scuola elementare e media. La necessità per le colleghe era quella di utilizzare un sistema semplice, che potesse essere accolto favorevolmente anche dagli allievi più piccoli e che non facesse uso di dispositivi elettronici. Riflettendo ho trovato una soluzione che è stata provata da alcuni amici insegnanti che mi hanno dato conferma dell’efficacia della soluzione. Per trovare una strategia analogica, divertente, da utilizzare con gli studenti più piccoli è stato sufficiente osservare il disordine sulla mia scrivania 🙂 … i Brick Lego.
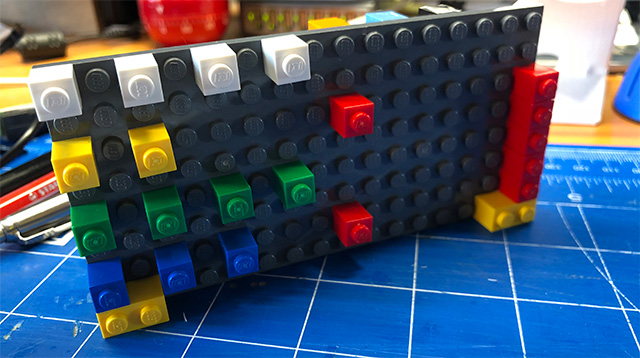
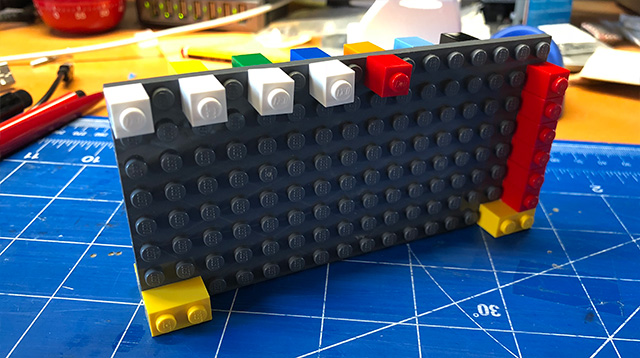
Il sistema consiste nell’utilizzo di mattoncini Lego da usare come “pomodori” disposti su una plate Lego di dimensioni 16×8.
Ogni mattoncino 1×1 identifica l’esecuzione di un pomodoro e la conclusione di un’attività è indicata con un mattoncino 1×1 di colore specifico (nell’immagine rosso) questo permette di far visualizzare la conclusione del compito.
Nell’immagine che segue il compito si è concluso con 4 pomodori, il brick rosso identifica la conclusione del compito
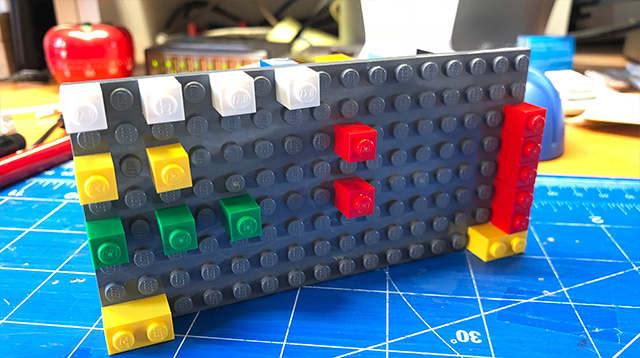
Dopo 4 pomodori ci si prende una pausa più lunga e se il compito non è concluso si va a capo e si prosegue, solo quando il compito sarà concluso potrete inserire il mattoncini di conclusione. Quindi avrete anche percezione di compiti che durano per più di una serie di 4 pomodori.
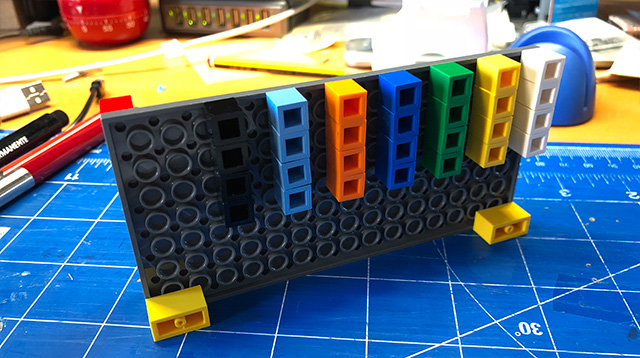
Nell’immagine che segue abbiamo 1 compito concluso in 6 pomodori (4 bianchi più 2 gialli) e un compito concluso in 3 pomodori (verdi).
Ovviamente il tutto potrà essere realizzato in modalità diverse, le dimensioni che mostro in questo post sono dettate dagli spazi disponibili sulla mia scrivania, ma potrete personalizzare ed ampliare il sistema, ad esempio utilizzando Lego Bricks più grandi, di forma quadrata, dipenderà quindi dalle vostre esigenze, per i bambini di scuola elementare un’alternativa potrebbe essere l’impiego di mattoncini Duplo.
Adottare il mattoncini Lego credo che possa dare percezione fisica del progetto e del tempo necessario per svolgerlo, l’azione che fa aggiungere al bambino un mattoncini “pomodoro” costringe a pensare all’azione e al problema.
Spero di aver dato consigli utili alle colleghe.
Buona progettazione a tutti 🙂

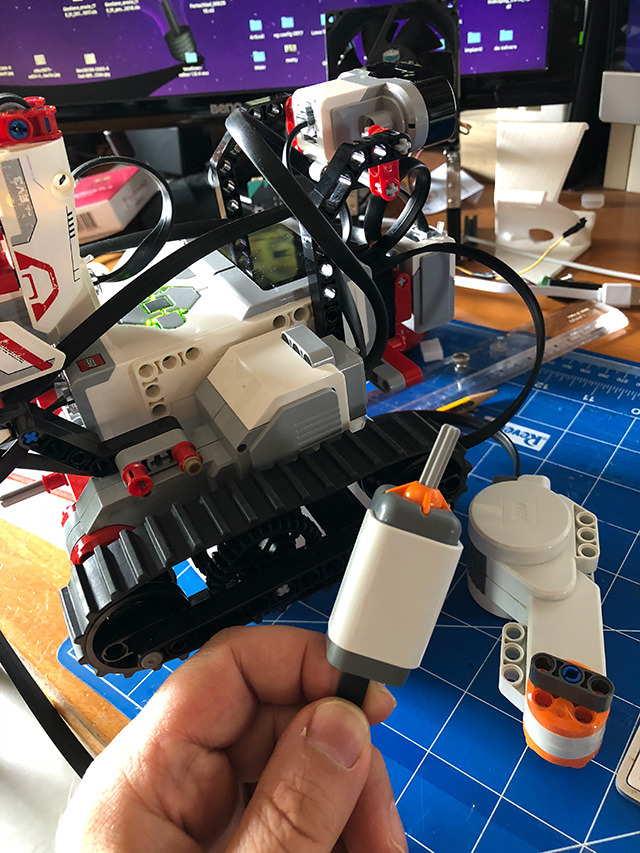
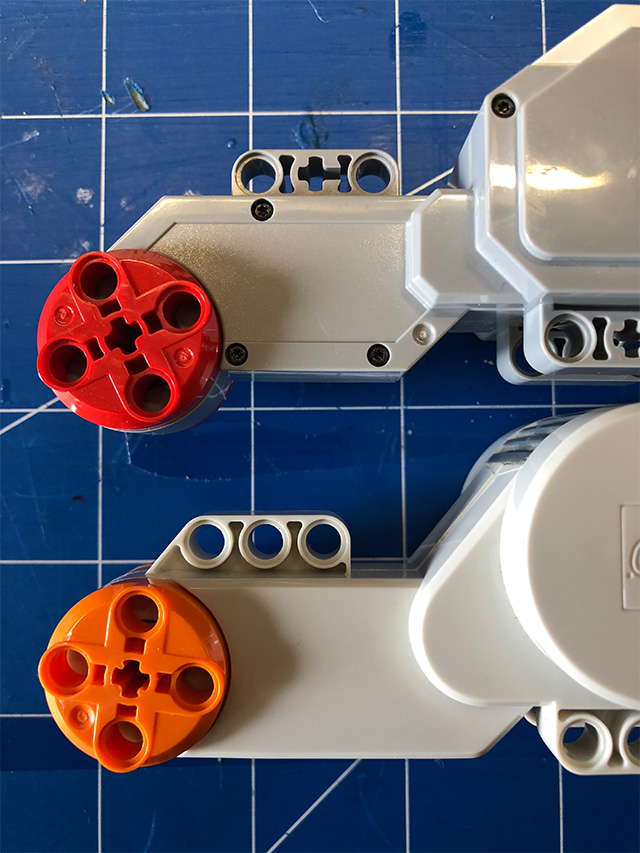
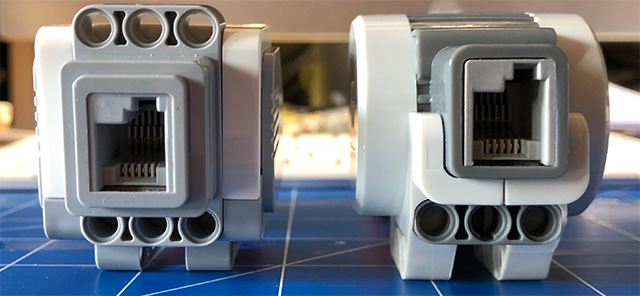
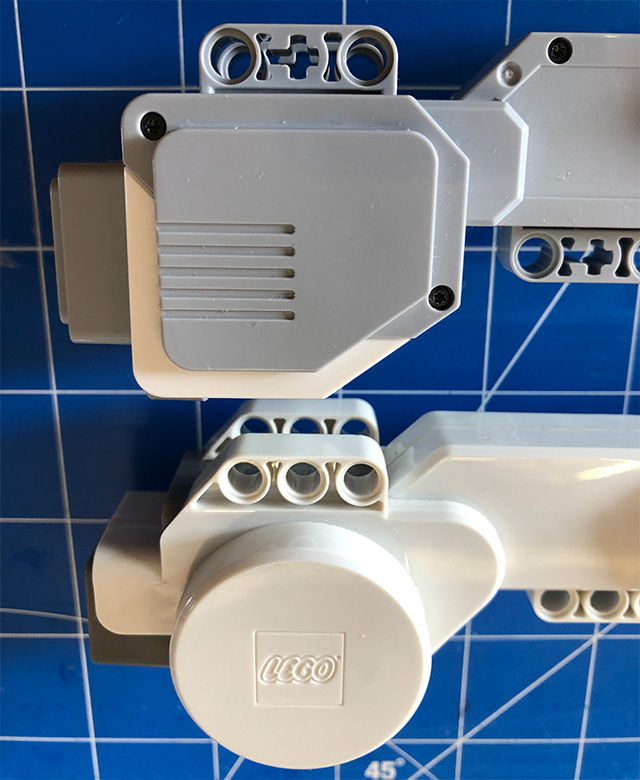
 I due motori hanno circa le stesse dimensioni, però ad un esame più attento, i due motori richiedono procedure di montaggio diverse. Il motore NXT ha tutti i fori arrotondati, mentre i collegamenti del motore EV3 hanno fori arrotondati e trasversali. Il motore EV3 ha anche una fila aggiuntiva di tre fori vicino al connettore elettrico e ciò lo rende più versatile. I fori del motore EV3 sono molto più bassi e alcuni sono addirittura spostati su un lato.
I due motori hanno circa le stesse dimensioni, però ad un esame più attento, i due motori richiedono procedure di montaggio diverse. Il motore NXT ha tutti i fori arrotondati, mentre i collegamenti del motore EV3 hanno fori arrotondati e trasversali. Il motore EV3 ha anche una fila aggiuntiva di tre fori vicino al connettore elettrico e ciò lo rende più versatile. I fori del motore EV3 sono molto più bassi e alcuni sono addirittura spostati su un lato.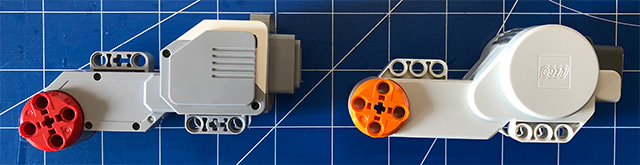
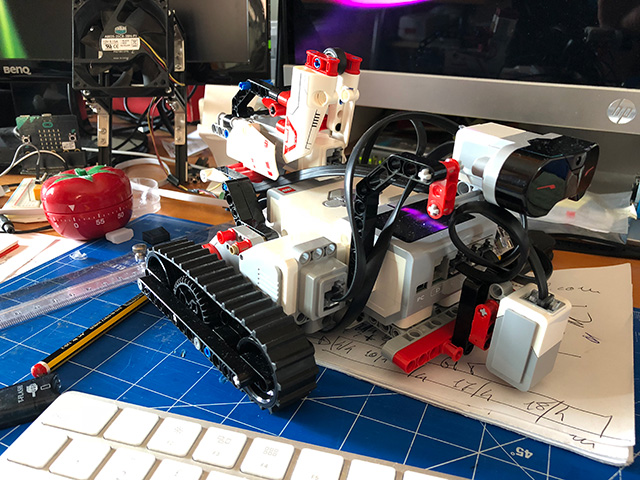
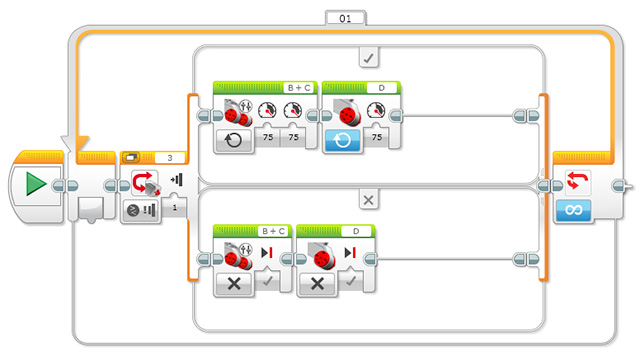
 Bene detto ciò, riapro le vecchie scatole e parto con il Coding su Lego.
Bene detto ciò, riapro le vecchie scatole e parto con il Coding su Lego.