Nell’ambito delle sperimentazioni per lo sviluppo di attività STEAM che sto conducendo, ho pensato di integrare le mie esercitazioni di modellazione e stampa 3D per gli allievi più giovani con la realizzazione di solidi geometrici per me affascinanti. Da quello che ho notato sono oggetti capaci di catturare l’attenzione degli allievi e stimolarne la curiosità. Tra le forme geometriche selezionate l’oloide si è rivelato particolarmente efficace: durante le prime sperimentazioni che ho condotto, gli allievi sembravano quasi ipnotizzati e parecchio curiosi nel vedere il suo movimento così insolito.
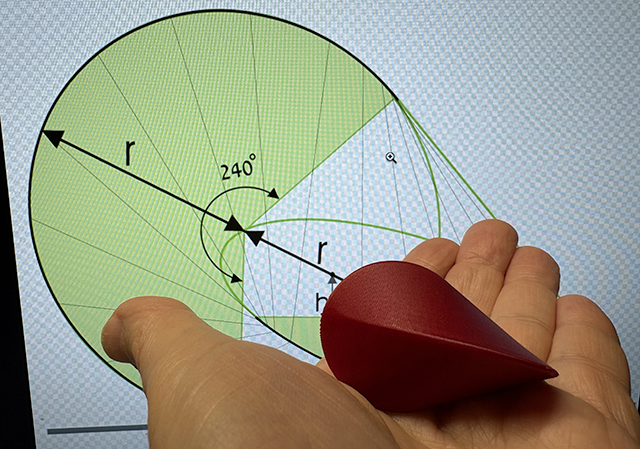
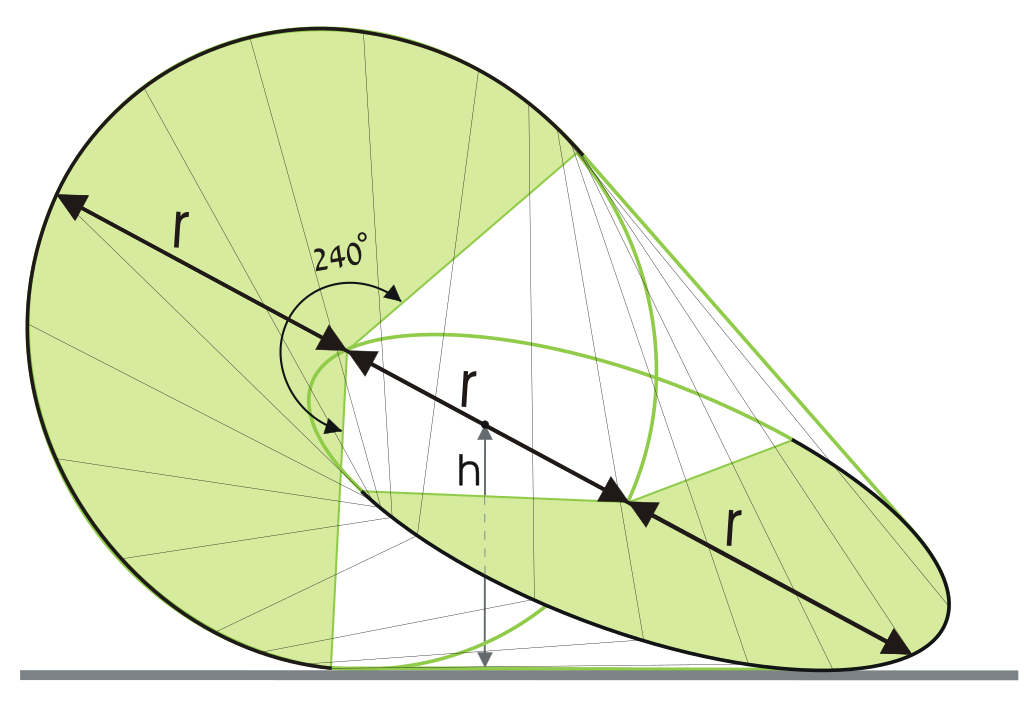
L’oloide è un solido geometrico scoperto nel 1929 dal matematico e scultore svizzero Paul Schatz. A prima vista, la sua forma può sembrare irregolare, ma in realtà è un oggetto matematicamente definito, costruito a partire da due cerchi identici disposti in un modo particolare nello spazio. Viene definito come “l’inviluppo convesso di 2 circonferenze di raggio R uguali tra loro, disposte su 2 piani ortogonali e tali che ognuna delle 2 passi per il centro dell’altra.”
Una delle sue caratteristiche più affascinanti è il modo in cui rotola: pur non avendo superfici piane di appoggio come una ruota, l’oloide si muove con un’oscillazione particolare, alternando punti di contatto con il piano su cui si sposta percorrendo una linea retta.
Questo movimento unico lo rende particolarmente interessante per attività didattiche, in quanto permette di esplorare concetti di geometria, fisica e cinetica in modo visivamente coinvolgente.
Il suo moto vacillante incuriosisce gli studenti e genera un effetto di sorpresa, diventando così un perfetto strumento rompighiaccio in classe. Credo possa essere utilizzato in diversi modi:
- osservazione e discussione: si può chiedere agli studenti di ipotizzare come potrebbe muoversi prima di vederlo in azione.
- esperimenti pratici: lasciarlo rotolare su superfici diverse e analizzare il suo comportamento.
- collegamenti interdisciplinari: l’oloide può essere un punto di partenza per approfondire concetti di matematica, fisica e persino arte e design.
Questa forma geometrica come altre che sto selezionando, permettendo agli studenti di scoprire la bellezza della geometria in modo giocoso e coinvolgente pertanto ho pensato di utilizzarlo durante i corsi di stampa 3D in modo da favorire l’inclusione, la partecipazione e l’apprendimento attivo.
Online potete trovare numerosi progetti tra cui quello che vi allego:
Il modello è pronto per la stampa, ma necessita di supporti per essere realizzato correttamente. Se volete portare l’oloide in classe, vi consiglio di sperimentare con diverse dimensioni e materiali per ottenere il miglior effetto possibile.
Buona sperimentazione 🙂
Risorse: