
 Durante alcuni corsi di Coding e robotica per colleghi di scuola media mi è stato manifestato il desiderio di poter avere a disposizione un kit robotico estremamente semplice da realizzare poco costoso e che occupasse poco spazio, che potesse adattarsi, come sempre, a microcontrollori di ogni tipo, soprattutto Arduino e micro:bit.
Durante alcuni corsi di Coding e robotica per colleghi di scuola media mi è stato manifestato il desiderio di poter avere a disposizione un kit robotico estremamente semplice da realizzare poco costoso e che occupasse poco spazio, che potesse adattarsi, come sempre, a microcontrollori di ogni tipo, soprattutto Arduino e micro:bit.
Esplorando per altri scopi il sito youmagine ho scoperto i moltissimi lavori realizzati da RCCM anche lui come me insegnante (vi consiglio di guardare i suoi lavori) ed ho notato il progetto Micro Servo Chassis, per cui sulla stessa idea ho realizzato una struttura simile ed inserito gli elementi di aggancio per i servomotori che avevo realizzato per il DotBot:bit.
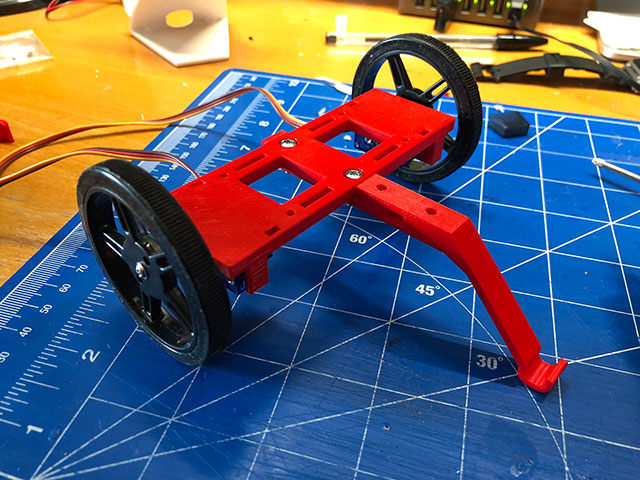
Per ridurre la quantità di materiale ho eliminato, rispetto alle strutture precedentemente realizzate la caster ball, la biglia di supporto, che ho sostituito con una piccola bacchetta costituita da un punto di appoggio al terreno ricurvo, il tutto vincolato alla struttura portante dei motori.
Nel caso si debba aggiungere parecchia elettronica, per aumentare ancor di più la stabilità ho sviluppato una doppio supporto strisciante così come potete notare nelle immagini allegate.
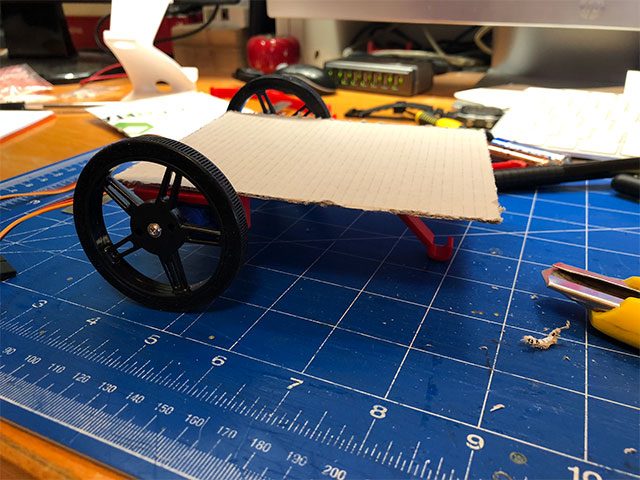
Su questo piccolo chassis robotico potrete, secondo necessità ed in funzione di ciò che disponete, predisporre una base di appoggio come ad esempio: cartone, compensato o plexiglas fissata con viti o fascette di plastica.
Ecco giustificato il nome DotBot:Smart perché veloce da costruire, due elementi da stampare e poi Coding a volontà 🙂
Questo nuovo kit didattico si aggiunge alla famiglia DotBot.
Nel caso desiderate effettuare la stampa questo il link diretto di DotBot:Smart su Thingiverse.
Come sempre se durante le sperimentazioni con i vostri allievi si evidenziano correzioni o miglioramenti da fare, non esitate a contattarmi.
Di seguito le foto che mostrano come costruire il robot.
Materiali occorrenti
- qualsiasi tipo di microcontrollore: micro:bit, Arduino, oppure Raspberry Pi (qualsiasi modello)
- n. 2 bulloni M3 – viti da 10 mm
- n. 2 FS90R servo a rotazione continua
- n. 2 due ruote per FS90R 60mm x 8mm
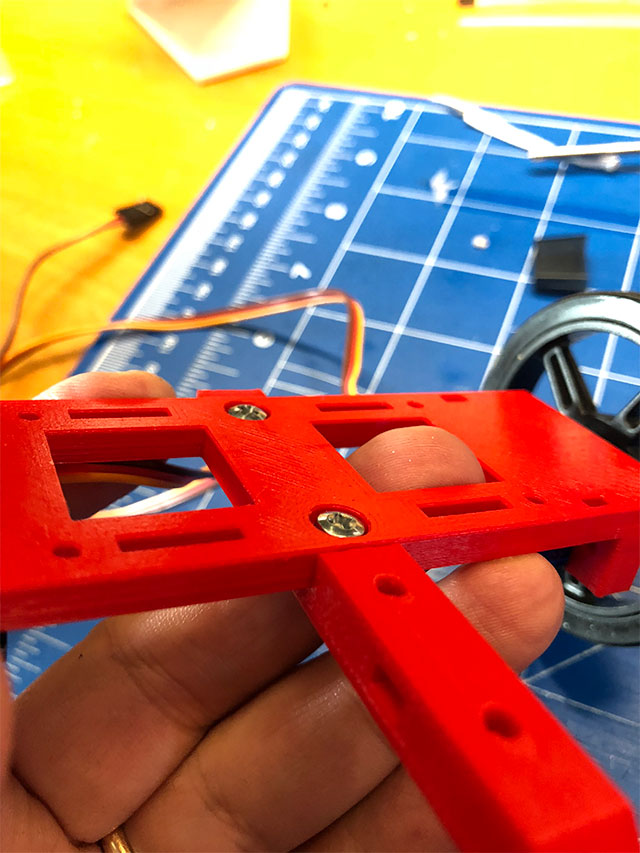
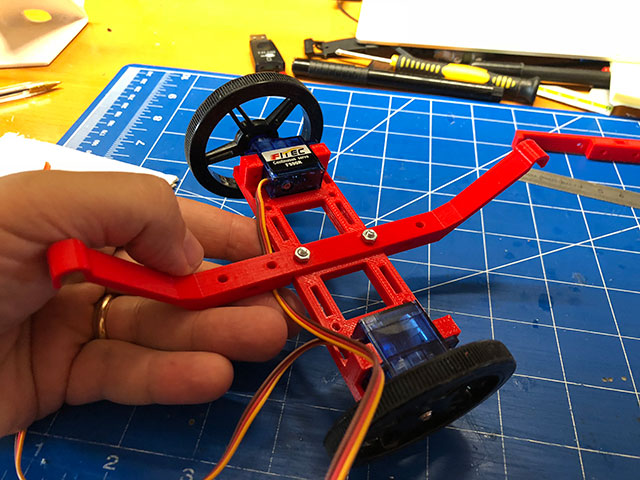
La barra centrale deve avere un orientamento, rispetto ai servomotori, identico a quello indicato nell’immagine (notate l’albero di rotazione del servo). I servomotori sono fissati con piccole viti in dotazione quando acquistate i servo:

Le viti di blocco della barra centrale sono sotto il livello di appoggio della base in modo da non creare un rialzamento:
Scegliete il materiale di cui disponete, (nell’immagine cartone) e con del nastro biadesivo fissate breadboard ed elettronica:
Il fissaggio può avvenire mediante fascette di plastica:
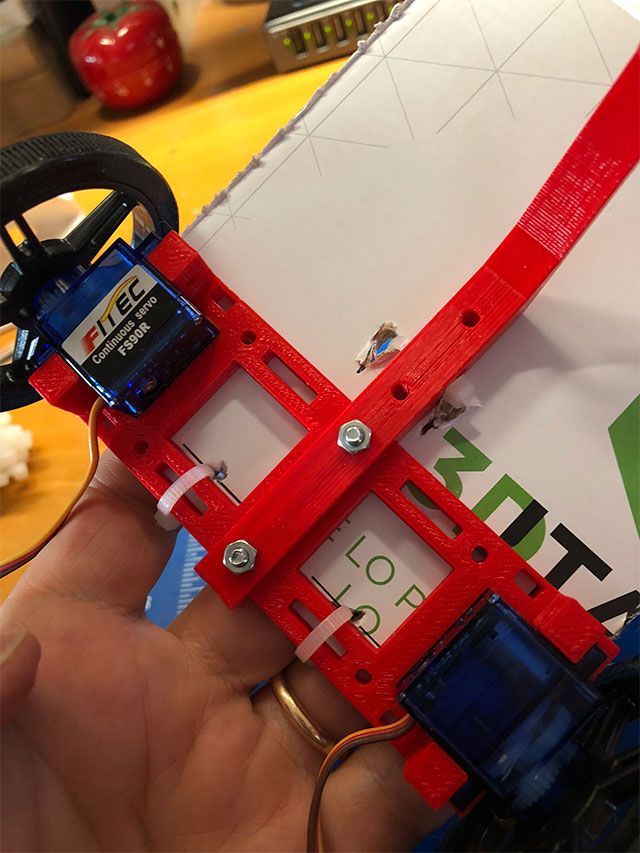
Nel caso abbiate necessità di maggior superficie di appoggio e maggior stabilità potete utilizzare la barra centrale con doppio appoggio:

Buon Coding a tutti.