
Nelle scorse settimane, durante la presentazione del mio corso introduttivo sull’uso di micro:bit per fare coding a scuola, avevo anticipato che avrei concluso il corso con la presentazione di una piccolissima struttura robotica, a bassissimo costo, da utilizzare con BBC micro:bit.
Diversi colleghi mi hanno scritto manifestando la volontà di utilizzare micro:bit nelle loro classi, alcune persone mi hanno chiesto la possibilità di vedere subito il piccolo robot basato su micro:bit in modo da poterlo realizzare subito a scuola, ho quindi deciso di anticipare i tempi e rendere disponibile un breve tutorial sulla costruzione del robot fornendo anche i sorgenti per la stampa 3D.
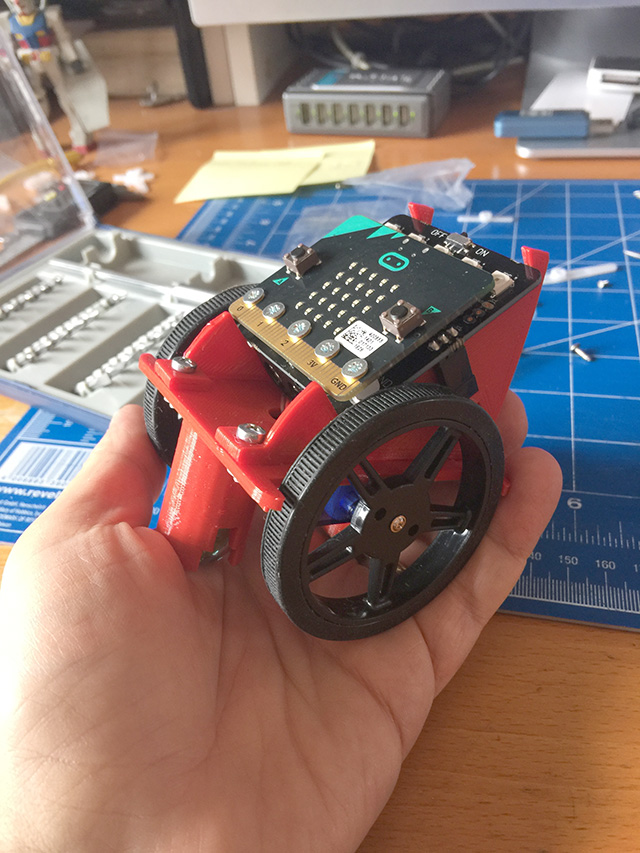
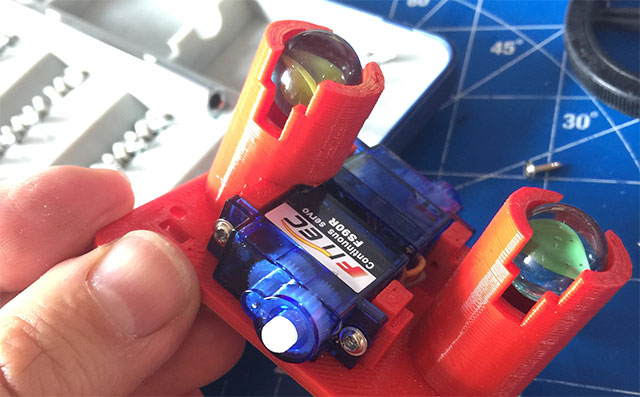
Vi presento DotBot:bit
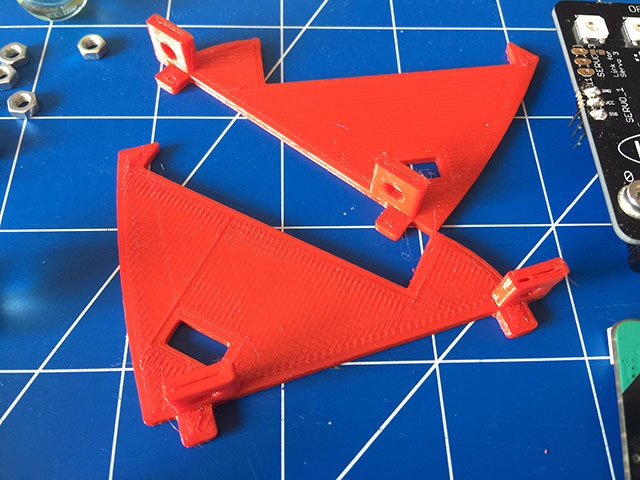
Il risultato, in un paio di nottate passate a disegnare su carta, modellazione 3D rapida e prove di stampa, il risultato il seguente:
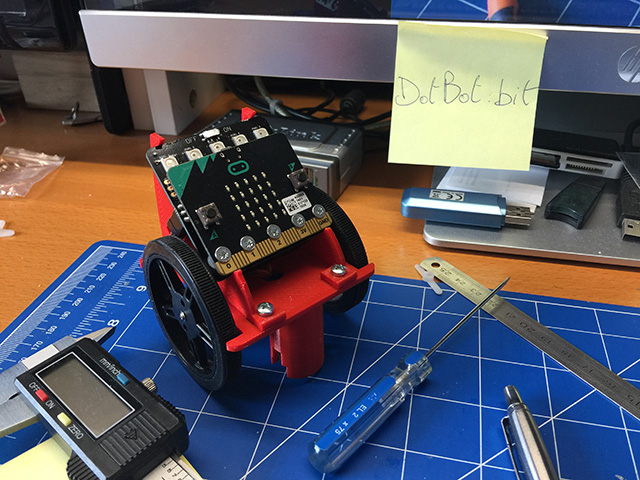
… e dopo l’approvazione da parte di mia figlia e mia moglie ho deciso di pubblicare tutorial e sorgenti 🙂
Durante la fase di progettazione mi sono imposto i seguenti obiettivi:
- stampa in tempi brevissimi;
- costi bassissimi
- difficoltà di montaggio quasi nulla
- dimensioni ridottissime
- la struttura deve poter essere adattabile ad altre tipologie di schede: Arduino, RaspberryPi Zero W;
- espandibile;
- open hardware;
Le dimensioni sono contenutissime una base di 70×70 mm ed un’altezza che non supera i 90 mm.
Utilizzerò questo piccolo robottino durante i miei corsi a scuola per gli studenti e durante i momenti di formazione per i docenti.
Un primo momento sarà sicuramente durante un corso per docenti di scuola elementare e media a Moncalieri (To) il prossimo ottobre. Inoltre utilizzerò DotBot:bit durante la EU Code Week e in altri eventi programmati.
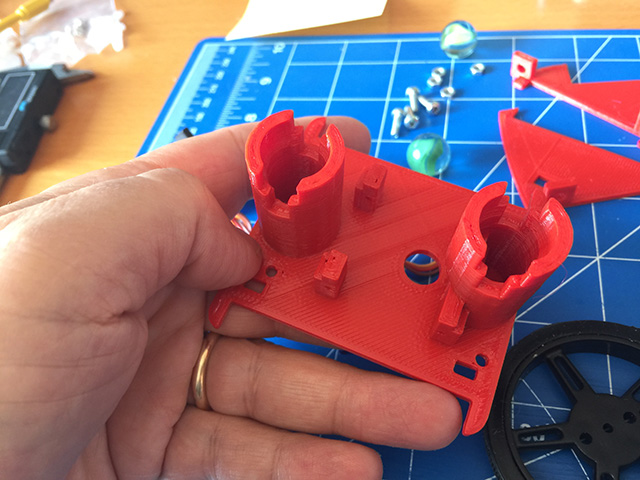
La stampa di tutte le parti, solo 3 elementi, richiede circa 1 ora e 40 minuti, ho usato per il primo prototipo del PLA rosso, con un layer di 0,3 mm ed un riempimento del 30%, il peso totale degli elementi stampati è di circa 36 grammi, quindi con 1 Kg di PLA potrete stampare un bel po’ di robot, circa 28 DotBot:bit 🙂
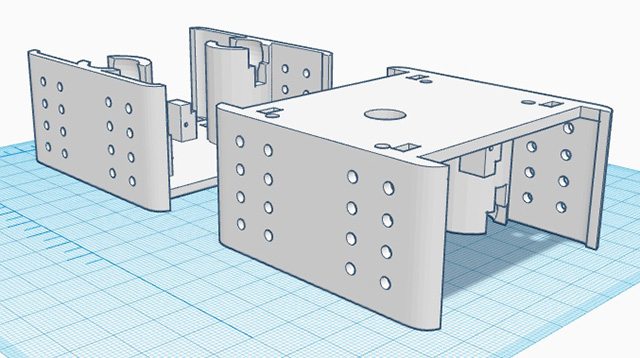
Ho accennato che la struttura è espandibile, infatti nell’immagine notate che i supporti per le schede sono bloccati da incastri e 4 viti, allo stesso modo potranno essere fissate basi adattate per schede Arduino e RaspberryPi Zero W che ho già disegnato, quindi liberi di poter operare con l’elettronica che si desidera in modo da avere uno strumento che possa essere utilizzato per ogni grado di istruzione, dalle elementari alle superiori.
E se voglio aggiungere sensori o altra elettronica?
Anche in questo caso le parti che ho prototipato si sviluppano in altezza, a layer, ma di questo ve ne parlerò più avanti, vi mostro solamente una bozza di una versione che permette di utilizzare le parti frontali per avvitare altri elementi (sensori ad ultrasuoni, finecorsa, ecc…)
Di cosa abbiamo bisogno:
Nell’immagine che segue potete vedere tutto ciò che necessita:
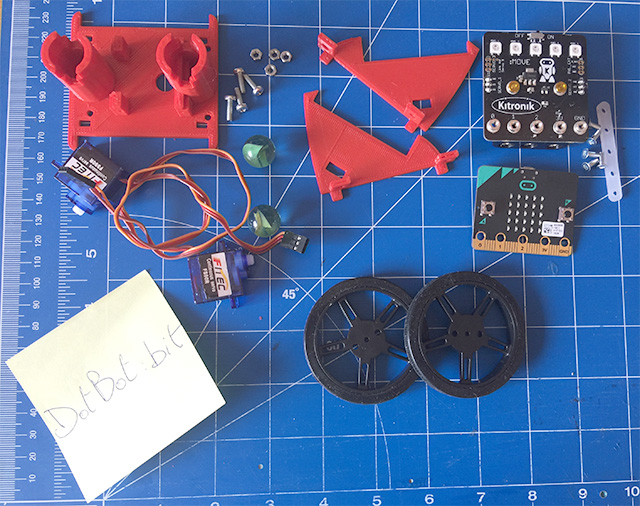
- n. 1 micro:bit;
- n. 2 micro servomotor a rotazione continua FS90R. Vengono venduti con leve e 3 viti. Le 4 viti che troverete nelle due confezioni dei servo le utilizzeremo per fissare i motori alla struttura;
- due ruote per micro servo da 60 mm. Nella confezione dei servo utilizzeremo la terza vite per fissare le ruote ai motori;
- n. 4 viti M3 da 10 mm;
- n. 4 dadi M3;
- n. 2 biglie da circa 16 mm (fate attenzione perché le dimensioni possono oscillare dai 15 ai 16 mm) nel caso variate voi i sorgenti per adattare l’incastro alle biglie che possedete.
- n. 4 viti da 2 mm le trovate insieme ai servo;
Se desiderate, per rendere semplice l’utilizzo di servomotori ed aggiungere interattività con LED RGB nell’immagine vedete una Servo:Lite board di Kitronik, ditta che produce diverse schede di espansione per micro:bit ed un piccolo robot basato su micro:bit
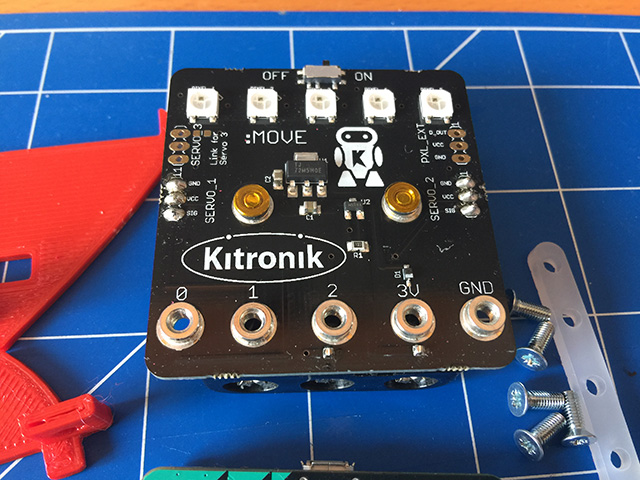
… ma siccome a me piace impostare corsi che partono dalla stampa 3D ed arrivano al coding ho preferito creare tutto.
Tenete in conto che potete realizzare il DotBot:bit anche senza l’utilizzo del Servo:Lite board, vi mostrerò il tutto in un prossimo post.
Bene!
Di seguito la sequenza di montaggio.
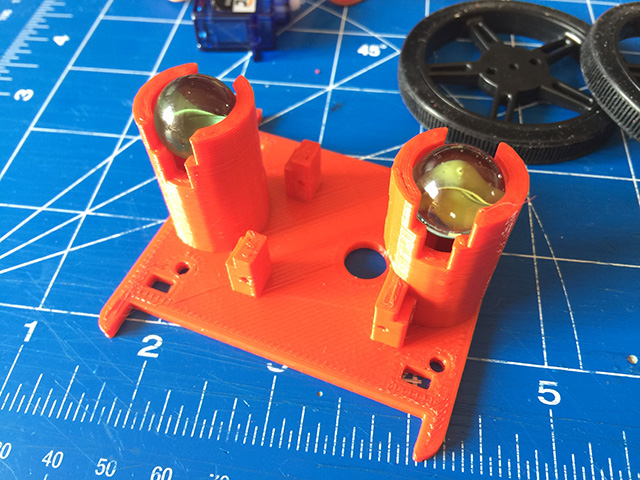
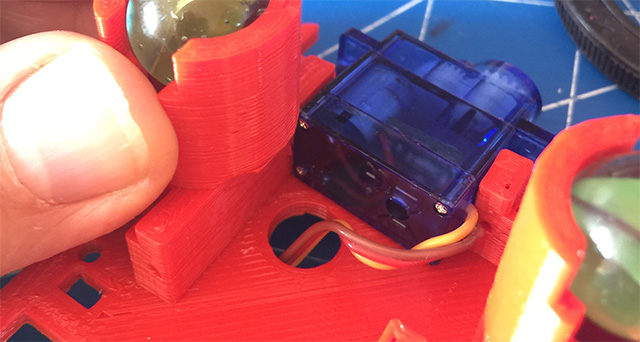
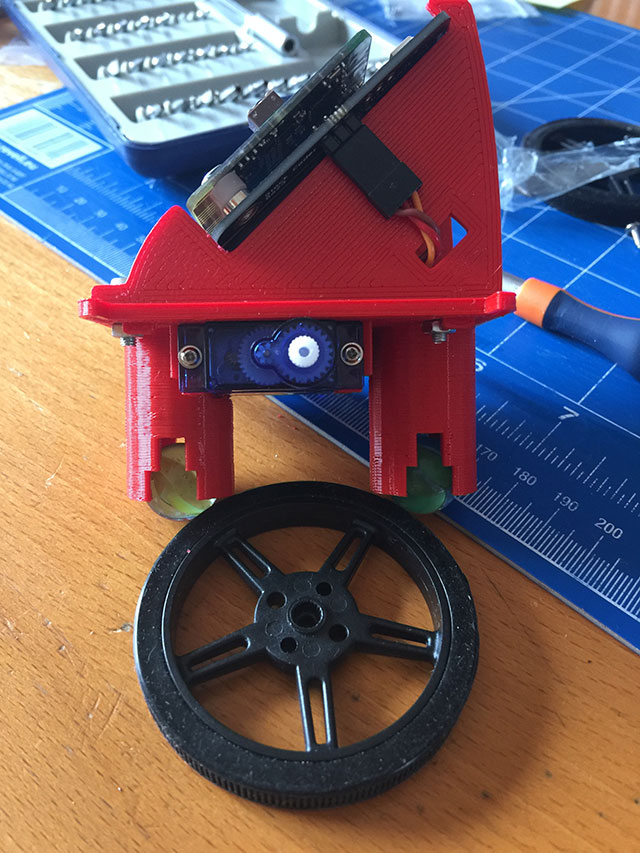
Partiamo dalla base principale, inseriamo le due biglie di vetro, sarà sufficiente una leggera pressione per incastrarle:
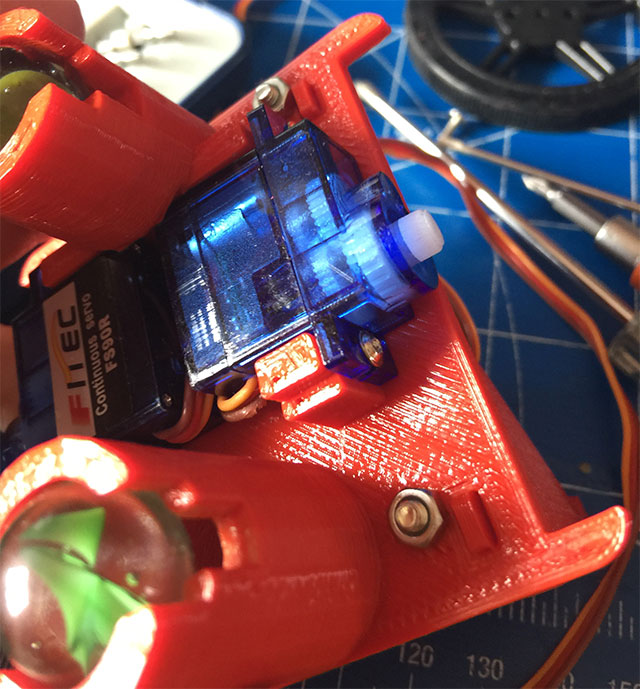
Fissiamo i servomotori a rotazione continua sulla struttura:
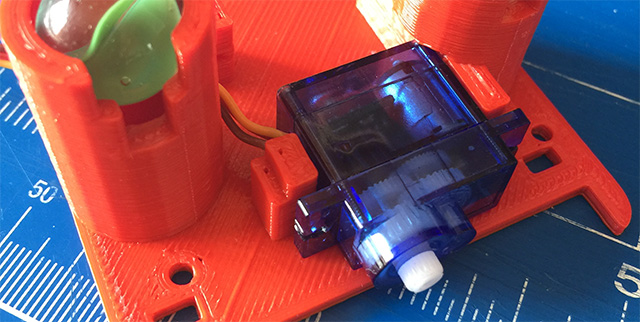
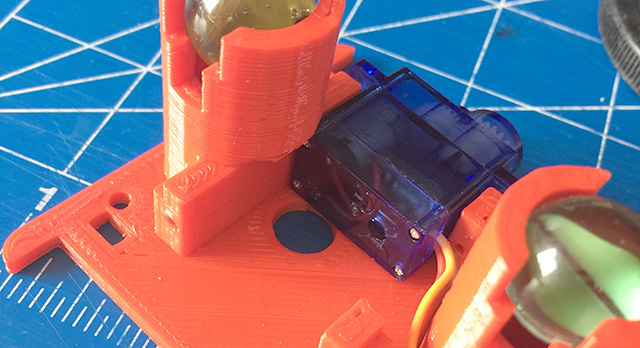
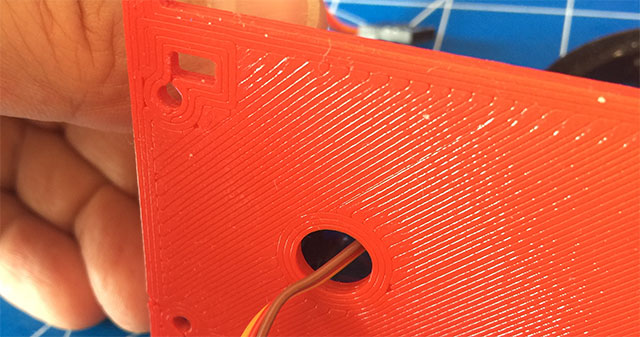
Inserite il cavo del servomotore nel foro presente sulla base del robot:
Fissiamo i servomotori utilizzando le 4 viti che trovate nella confezione dei servomotori che potrete acquisterete su qualsiasi store di prodotti elettronici:

I supporti per le schede sono assicurati alla base da un incastro e bloccati con viti da 10 mm e dadi M3.
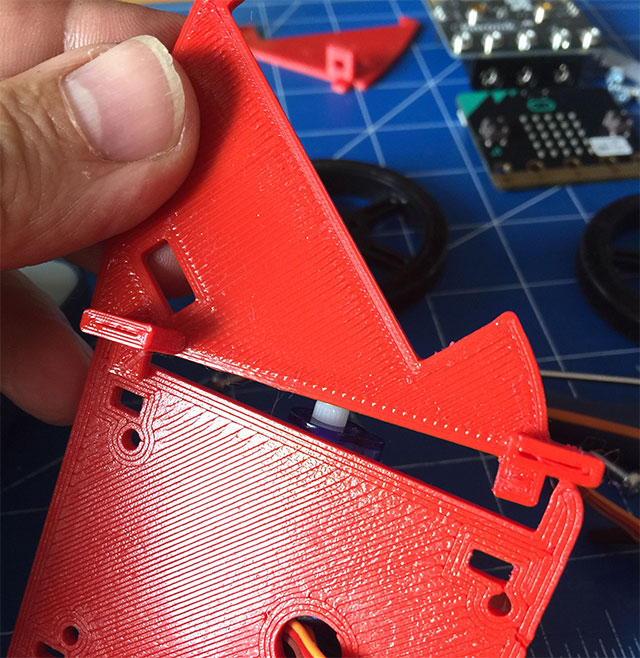
Incastrate le due parti e procedete al fissaggio con le viti:
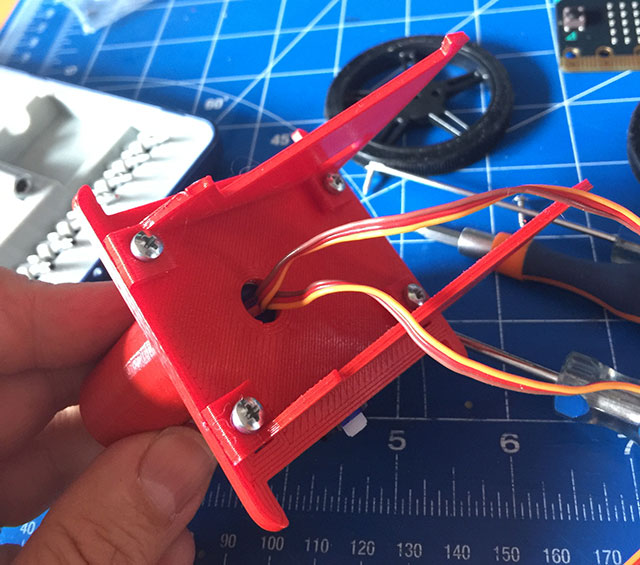
Fate passare i cavi dei servomotori attraverso le fessure dei supporti laterali:
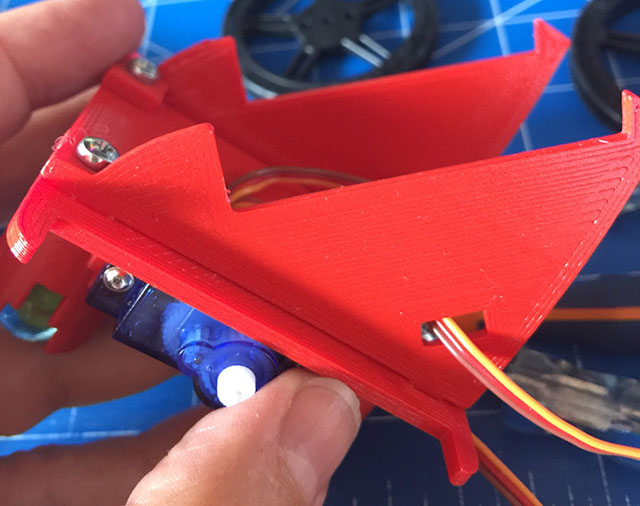
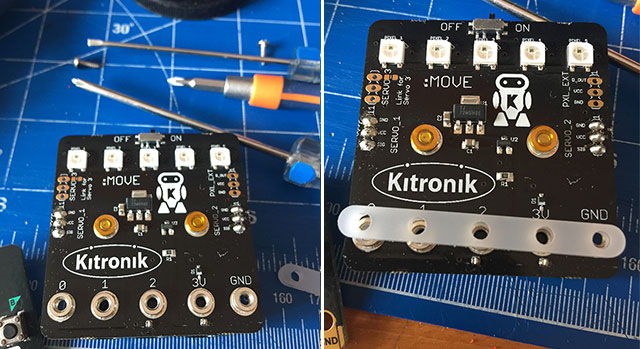
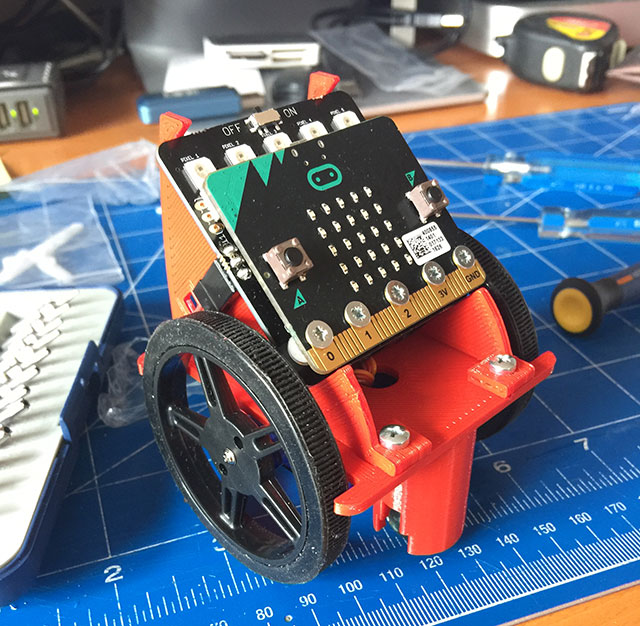
Montate la scheda per il pilotaggio dei servomotori.
Bisogna disporre la striscia di plastica forata in corrispondenza dei fori:
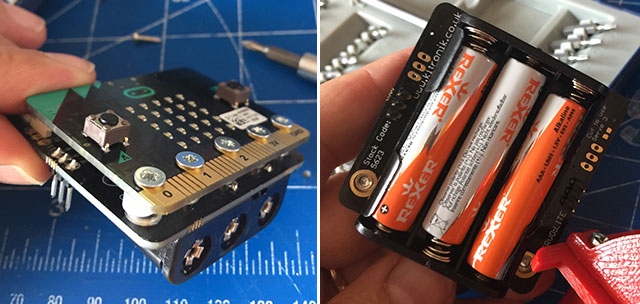
Tramite 4 viti, fornite insieme alla scheda di controllo servo, bloccate il micro:bit.
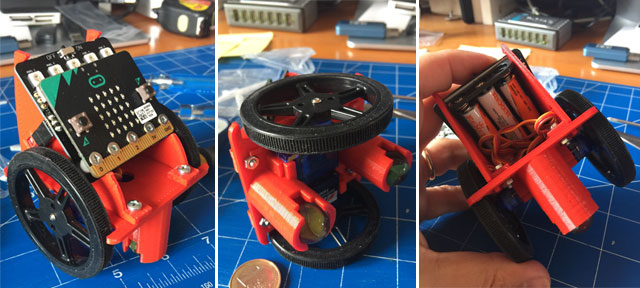
Nella parte posteriore della scheda di pilotaggio servo disponete 3 batterie AAA da 1,5V:
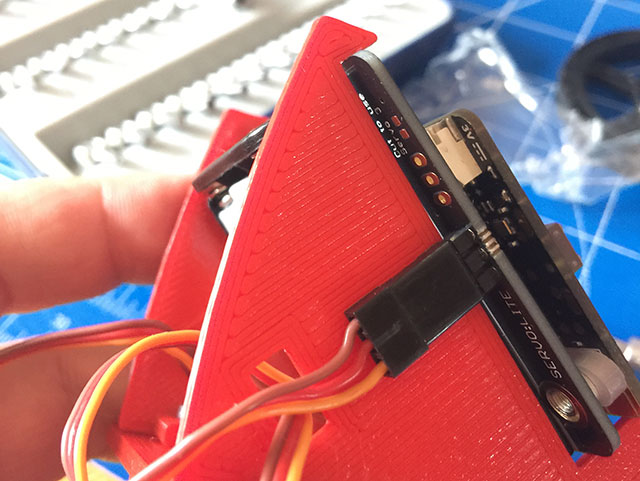
Incastrate la scheda nei supporti, sarà sufficiente spingere delicatamente e collegate entrambi i connettori dei servo così come indicato nell’immagine che segue:
Fissiamo le ruote ai servo mediante la vite che troverete nella confezione delle ruote:
La costruzione dell’intera struttura richiede non più di 30 minuti.
Se desiderate stampare questa struttura vi rimando alla pagina di riferimento di DotBot:bit su Thingiverse.
Buon Lavoro 🙂