
Avevo promesso qualche mese fa che avrei rilasciato i sorgenti grafici di EduRobot 4WD e lo scorso giugno studenti di alcune scuole italiane mi hanno chiesto la cortesia di rendere disponibili i sorgenti per la stampa 3D. Gli impegni di fine anno non mi hanno permesso di essere celere nella pubblicazione e visto che domani è l’inizio di un nuovo anno scolastico rendo disponibile la semplice base robotica in modo che possa essere utilizzata e spero anche migliorata dagli allievi.
Ma qual è l’idea progettuale di base di EduRobot 4WD?
Come ribadito nel post di presentazione di EduRobot 4WD, durante le attività laboratoriali di robotica con studenti e docenti, spesso la costruzione della parte meccanica richiede molta attenzione e tempo. Per questo motivo, ho deciso di realizzare un design semplice, ma funzionale, su cui poter facilmente integrare qualsiasi sistema di controllo elettronico. Pertanto per rendere la programmazione più stimolante e varia, ho progettato un robot 4WD che può avere diverse funzionalità: può essere comandato via Bluetooth o WiFi, può operare autonomamente, seguire persone, reagire alla luce, rilevare gas, seguire una linea, o ancora rispondere ai comandi vocali.
In questa struttura le parti che necessitano di solidità sono vincolate da viti metalliche mentre i circuiti di controllo e le batterie di alimentazione sono fissate con velcro a forte tenuta. L’utilizzo del velcro è stata una soluzione che mi ha permesso di ridurre le fasi di assemblaggio e di modifica della struttura. Ovviamente una struttura di questo genere non è cosa nuova, potete ritrovare design simili realizzati in compensato o in plexiglass su cui ad esempio i motori sono vincolati con colla a caldo, ma ciò ovviamente non permette di riutilizzare velocemente i motori per altre esercitazioni; inoltre le forcelle che vincolano i motori possono essere riutilizzati anche in altri kit che ho sviluppato, si veda ad esempio EduRobot Black Panther.
In questo modello, gli elementi che richiedono maggiore robustezza sono assicurati con viti metalliche, mentre i circuiti di controllo e le batterie di alimentazione sono fissate con velcro a forte tenuta. La scelta del velcro ha notevolmente semplificato e velocizzato le fasi di assemblaggio e modifica. Ovviamente una struttura di questo genere non è cosa nuova, potete ritrovare design simili realizzati in compensato o del plexiglass in cui ad esempio i motori sono vincolati con colla a caldo, ma ciò ovviamente non permette di riutilizzare velocemente i motori per altre esercitazioni; inoltre le forcelle che vincolano i motori possono essere riutilizzati anche in altri kit che ho sviluppato, si veda ad esempio EduRobot Black Panther.
La sequenza di assemblaggio è estremamente semplice, bisogna porre attenzione solo all’orientamento dei motori, ma le foto che seguono mostrano tutti i dettagli che vi permetteranno di assemblare il robot in circa 15 minuti.
Nelle foto potete vedere le due versioni:
- controllo remoto Bluetooth
- segui linea
Non posso mostrarvi la versione WiFi e con telecamera in quanto in questo momento sono disassemblati.
Ovviamente se serve, con piccole modifiche, potrete realizzare una versione a più livelli in modo da aggiungere tutti i circuiti che vi servono.
Per prelevare i sorgenti grafici seguire il link su Thingiverse.
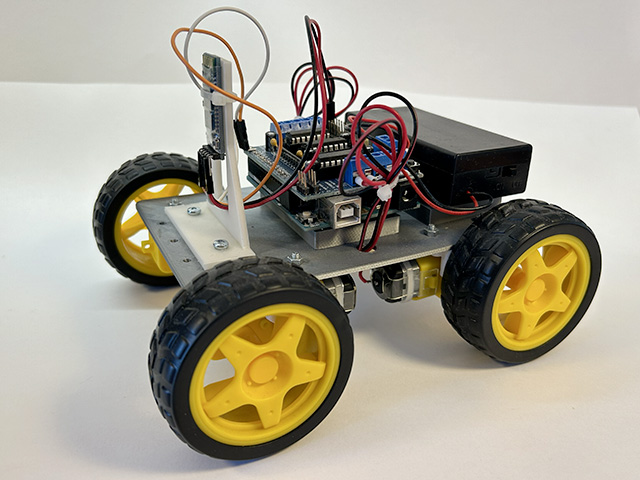
Versione Bluetooth
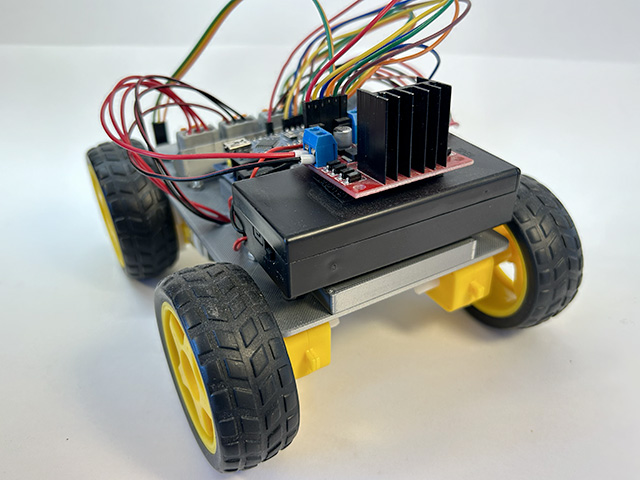
Complessivo.
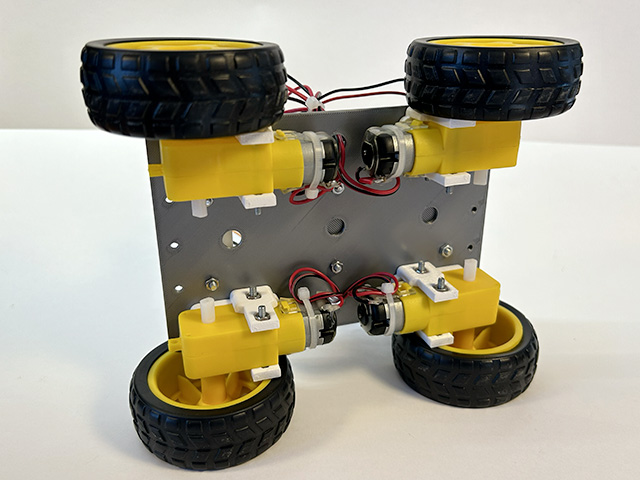
Vista motori.
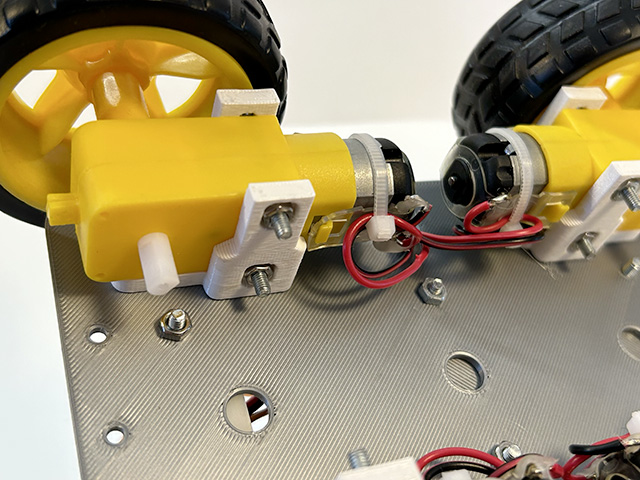
Dettaglio forcella motori.
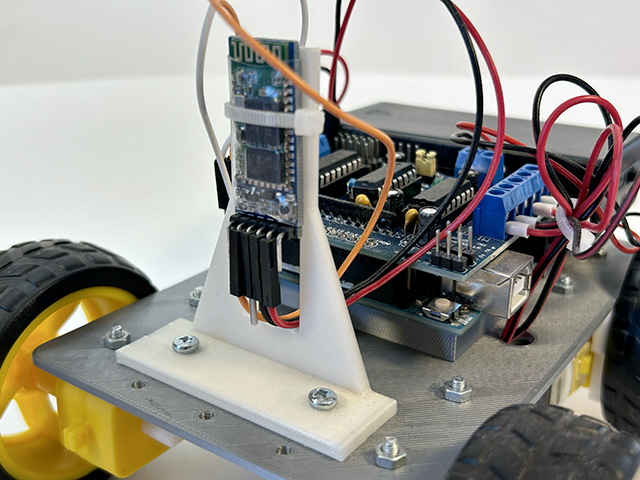
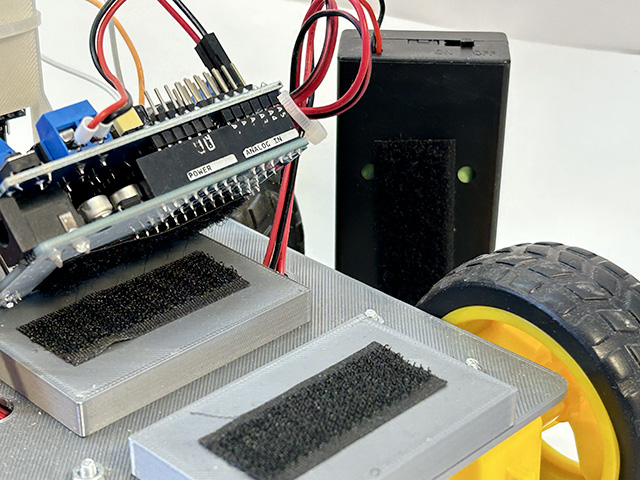
Dettaglio sensore Bluetooth.
Velcro applicato su pacco batteria (n. 2 18650 con interruttore) e base di rialzo che può essere fissata con viti.
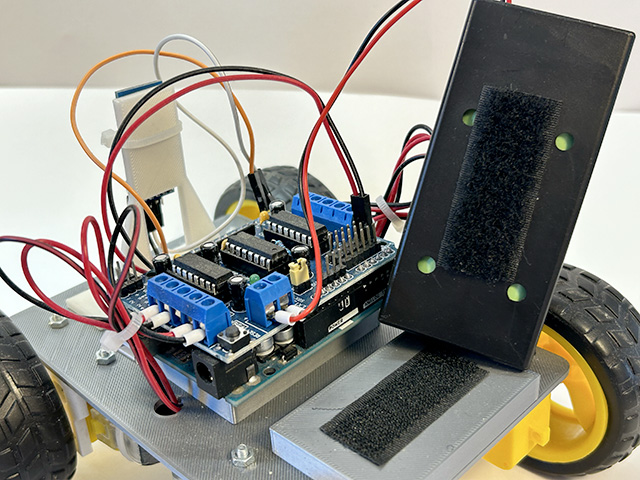
Velcro applicato sui circuiti.
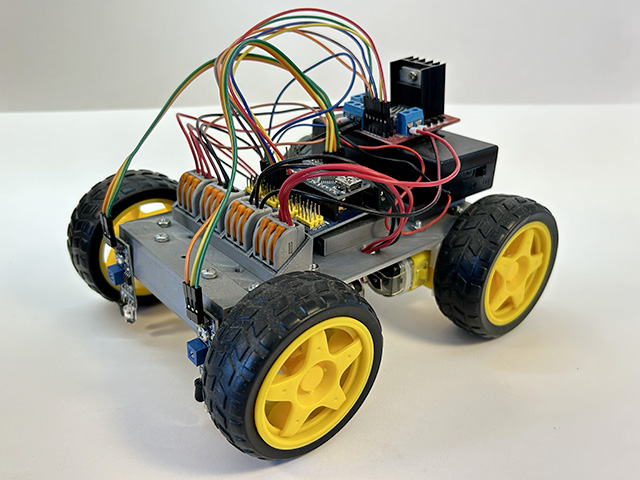
Versione segui linea
Complessivo.
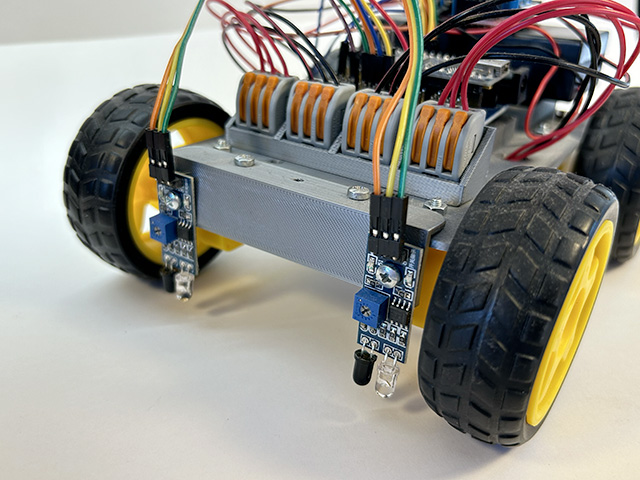
Dettaglio sensori IR.
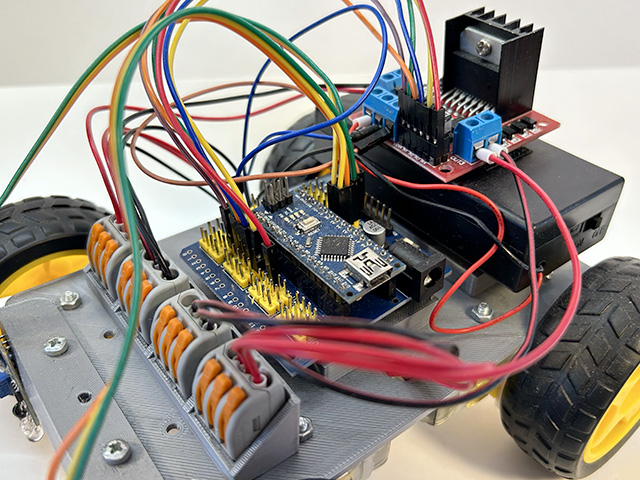
Vista superiore circuiti.
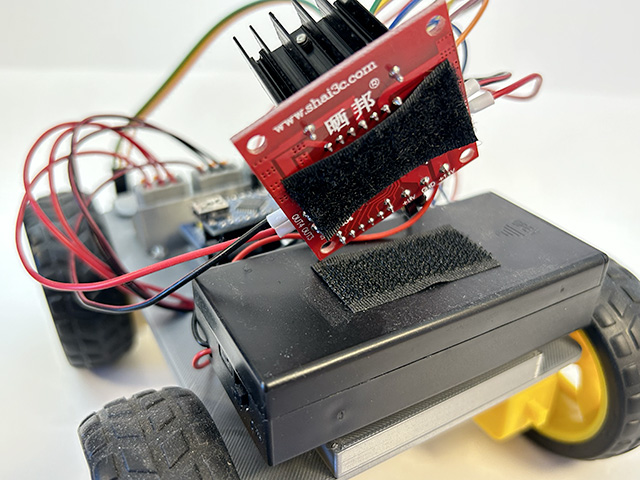
Vista posteriore in cui è evidenziato il controllo motori.
Velcro applicato sul controllo motori L298N e pacco batteria.
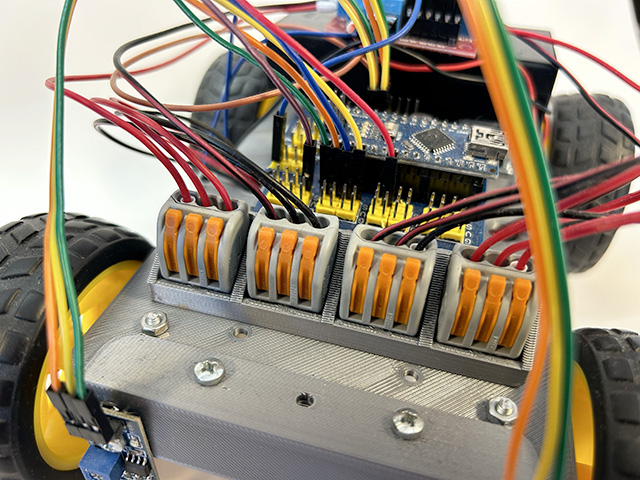
Dettaglio giunzione cavi effettuato con morsetti Wago.
Per quanto riguarda i collegamenti elettrici e la programmazione demanderò questa parte ad una guida successiva che pubblicherò nel breve.
Spero che il tutto possa servire e nel caso di necessità non esitate a contattarmi.
Buon Making robotico a tutti 🙂