Nuova edizione del corso sull’uso di BBC micro:bit. In questa edizione prenderò in considerazione sperimentazioni specifiche che fanno uso delle nuove funzionalità della versione 2 di BBC micro:bit in cui mostrerò nuove idee di progetti STEAM che ho realizzato in questi ultimi mesi anche di carattere IoT e del datalogging.
Mostrerò inoltre una nuova versione di robot didattico specificatamente pensata per micro:bit che potrà essere realizzato in autonomia con materiale di facile reperibilità. Come per le edizioni passate l’obiettivo del corso è quello di fornire le competenze necessarie per realizzare in piena autonomia attività di Coding con BBC micro:bit tracciando con esercizi ed esempi specifici, per ogni ordine di scuola, un percorso immediatamente spendibile in classe.
Ne verrà dettagliata la programmazione e le possibilità di simulazione in diverse modalità in modo da poter sviluppare anche sperimentazioni in DDI. Durante il corso verranno rese disponibili tutte le risorse: programmi e schede di progetto.
Saranno svolti 4 incontri in webinar di 2 ore ciascuno per un totale di 8 ore di formazione nei seguenti giorni:
Martedì 11 maggio 2021 – Ore 17.00/19.00
Venerdì 14 maggio 2021 – Ore 17.00/19.00
Martedì 18 maggio 2021 – Ore 17.00/19.00
Martedì 1 giugno 2021 – Ore 17.00/19.00
Per maggiori informazioni sui contenuti del corso e le modalità di iscrizione seguire il link.
In questi giorni sto seguendo una serie di Webinar di Siemens dedicati ai docenti, una di questi ha per titolo: “IoT , il Gateway Open Source di Siemens”, dalla configurazione alla programmazione di un IoT 2040. Nelle prossime lezioni si parlerà di Node-RED. Utilizzerò queste lezioni per ripassare l’argomento e predisporre brevi guide utili per me per non dimenticare le procedure di configurazione. Le guide saranno da me utilizzate anche come base di partenza per le future lezioni sull’uso dell’IoT 2040.
Tra i possibili modi con cui si può programmare il Gateway di Siemens, Node-Red è senza alcun dubbio uno dei più intuitivi.
Di seguito la procedura per avviare Node-RED al boot dell’IoT.
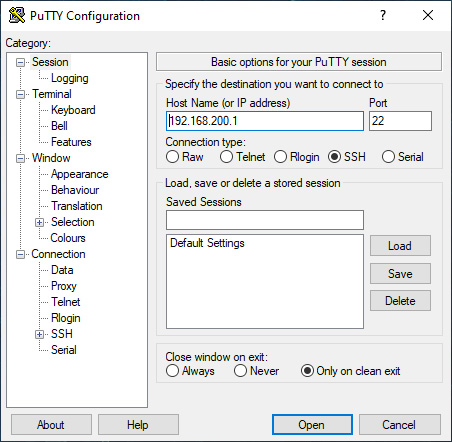
Per connettermi ho utilizzato una connessione SSH utilizzando su Windows PuTTY:
Se è la prima volta che vi connettete via SSH apparirà una finestra di avviso che vi chiederà di aggiornare la chiave SSH, fate click su Yes.
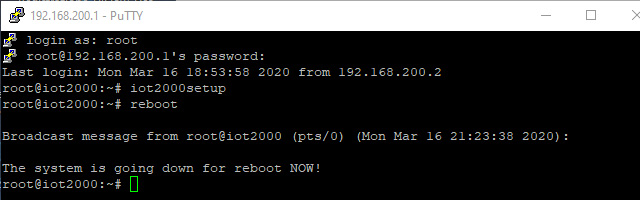
Per avviare al boot dell’IoT Node-RED bisogna entrare all’interno della configurazione della macchina Linux come utente root:
Per default non è inserita nessuna password di root, è buona regola inserirne una. Nell’immagine che segue la password era stata già da me impostata. Inserire le password e premete invio:
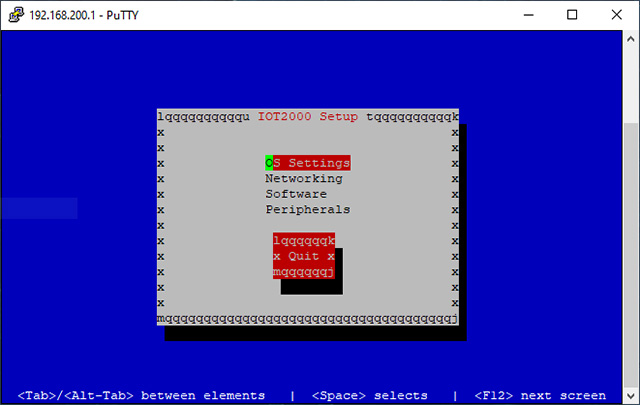
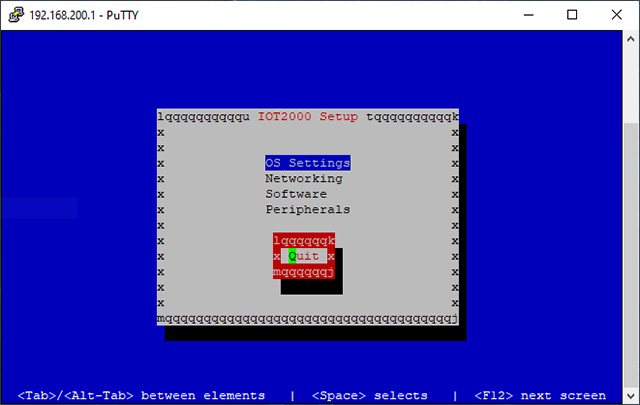
Per avviare il setup dell’IoT digitate: iot2000setup
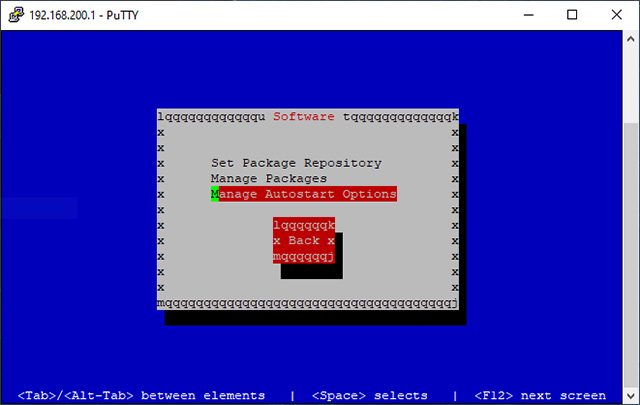
Selezionate: Software
Selezionate: Manage Autostart Options
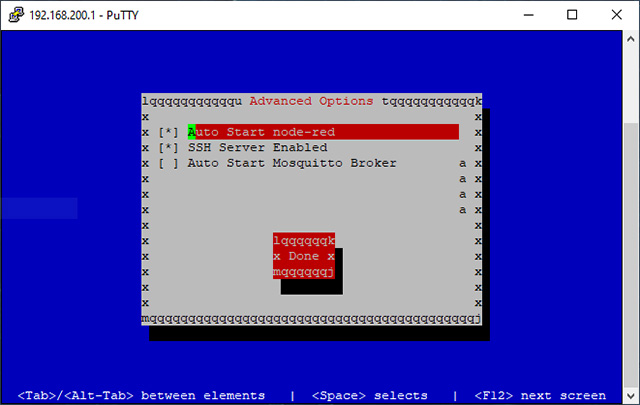
Selezionate, premendo lo spazio della testiera Auto Start mode-red e muovetevi con il tasto tab per giungere sul pulsante Done, confermate con il tasto invio
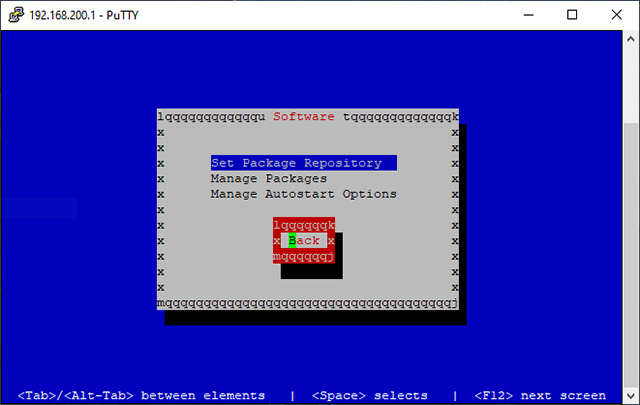
Con il tasto tab selezionate Back e premete invio
Con il tasto tab selezionate Quit e premete invio
Procedere al riavvio dell’IoT che può avvenire in due modi:
mediante il comando da terminale reboot
disattivando e riattivando l’alimentazione del dispositivo
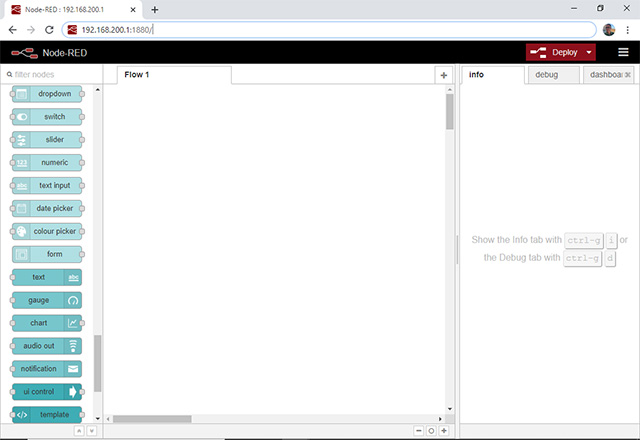
Aprite una finestra browser sul computer e digitate l’indirizzo IP: 192.168.200.1:1880 e premete invio. L’indirizzo potrebbe essere diverso, dipende dalle impostazioni che avrete fatto in precedenza, l’importante è che sia specificata la porta 1880 che è quella su cui risponde Node-RED.
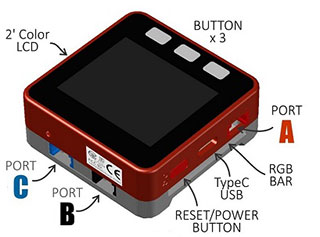
Da qualche giorno utilizzo l’M5stack Fire development kit, si tratta di un un kit di prototipazione basato su un chip ESP32 che permette di realizzare in tempi rapidissimi, applicazioni IoT con la possibilità di utilizzare una serie di schede di espansione di diverso tipo, oppure potete costruirne di vostre. Le schede di espansione si aggiungono impilandole, al di sotto del cuore del kit (la parte in rosso nell’immagine) una sull’altra e sono tra esse vincolate con dei magneti.
Perché ho acquistato M5Stack? Ho la necessità di sviluppare un prototipo di un robot per un progetto didattico in tempi brevi, il progetto necessita di display touch con connessione WiFi, Bluetooth. Ho l’esigenza di costruire rapidamente un’interfaccia grafica su un display da cui gestire il comportamento del robot, inoltre ho bisogno di avere anche degli output sonori e luminosi, quindi leggendo le specifiche dell’M5stack e guardando alcuni video dimostrativi, ho pensato di sperimentarne l’uso. Ovviamente non nego la curiosità nell’utilizzare l’oggetto 🙂
M5Stack Fire è costituito da tre unità separabili. Nell’unità superiore è alloggia tutta l’elettronica principale, l’ESP32, l’antenna 2.4G, l’elettronica per la gestione dell’alimentazione, schermo LCD touch. La parte centrale è chiamata base M5GO, all’interno trova posto una batteria al litio, una presa M-BUS, due strisce LED RGB e altre due porte GROVE. La parte inferiore è adibita alla ricarica, può essere collegata alla base M5GO tramite pin POGO. All’interno dell’M5Stack si trova anche una IMU in grado di fornire la posizione nello spazio del dispositivo.
I moduli disponibili sono moltissimi ed un elenco completo può essere visto seguendo il link, si va dai moduli GSM, moduli PLC, LORA, telecamere e sensoristica di ogni genere, gestione motori, interfacce per Lego Mindstorms e molto altro.
240 MHz dual core Tensilica LX6 microcontroller con 600 DMIPS
Memoria integrata: 520 KB SRAM
Integrata sulla scheda: 802.11b/g/n HT40 Wi-Fi transceiver, baseband, stack e LWIP
Integrata sulla scheda: dual mode Bluetooth (classic and BLE)
Hall sensor
Interfaccia capacitiva touch 10x
32 kHz crystal oscillator
PWM/timer input/output available per ogni pin GPIO
SDIO master/salve 50MHz
Supporto SD-card
Per maggiori informazioni
Sito di riferimento: https://m5stack.com
da cui accedere alla documentazione, esempi di utilizzo ed accesso all’interfaccia di programmazione a blocchi.
Canale YouTube da cui potete vedere diverse sperimentazioni
Ho acquistato M5Stack FIRE su Amazon, ma trovate il dispositivo e schede di espansione anche su diversi store cinesi (sul sito di riferimento trovate tutti i link).
Nel breve pubblicherò alcuni risultati sulle sperimentazioni condotte con M5Stack FIRE.
Sto svolgendo in queste settimane un corso Arduino per i miei allievi di II’, ma gli impegni dei consigli di classe e le attività di vicepresidenza mi hanno portato a spostare un paio di lezioni e per farmi perdonare ho deciso di implementare velocemente una breve lezioni che generi l’effetto “waooo” 🙂 spero possa funzionare. L’idea è quella di comandare la marcia e l’arresto di motori asincroni trifase (380 Vac) remotamente attraverso comandi dati da cellulare utilizzando tecnologia a basso costo.
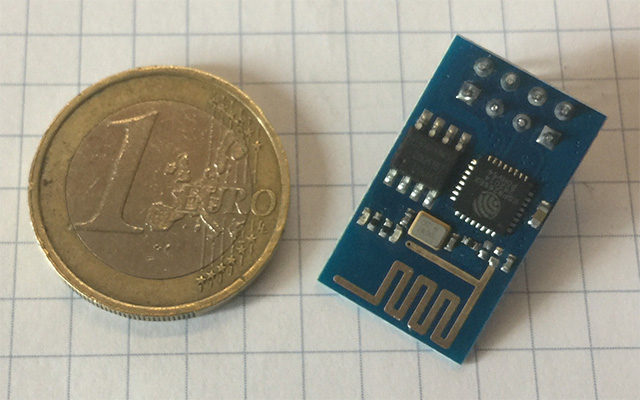
Aggiungere funzionalità di controllo remoto via WiFi ai propri progetti Arduino è ormai diventato relativamente semplice e molto economico. E’ da qualche tempo che sto utilizzando i noti ESP8266 nella versione più economica ESP01 per effettuare esperimenti di domotica a basso costo. ESP8266 è un microcontrollore programmabile in una modalità molto simile a quanto viene fatto per Arduino è costituito da un circuito SoC (System on Chip) dalle dimensioni ridottissime (5 x 5 mm) e la scheda che lo ospita integra un’antenna WiFi.
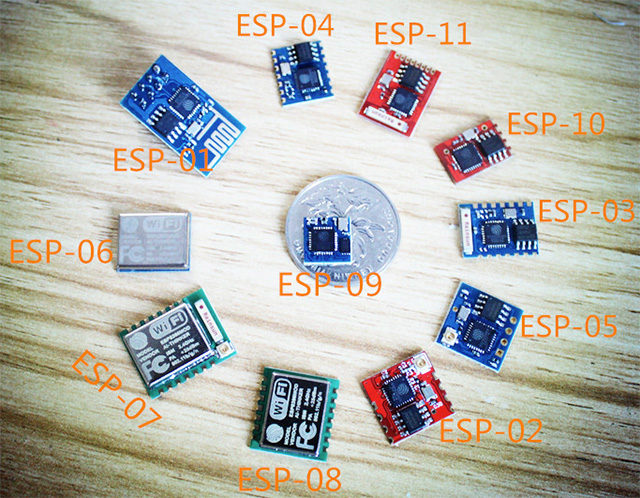
Esistono diversi modelli di ESP che includono l’ESP8266 ad essi è stato assegnato un nome che ha la seguente struttura ESP-XX dove XX è un numero che in questo momento va da 01 a 13 e che sicuramente nei prossimi mesi sarà destinato ad aumentare. In generale numeri più alti indicano funzionalità e performance più elevate, ma sicuramente ad oggi la versione più diffusa per semplicità di utilizzo e costi resta ancora l’ESP01.
I modelli ESP differiscono uno dall’altro per le seguenti caratteristiche:
dimensioni del modulo;
memoria flash, esterna al chip e varia da 512 KByte fino a 4MByte;
numero di pin;
antenna WiFi stampata su scheda o su apposito connettore a cui collegare un’antenna
Nell’immagine che segue un elenco dei più diffusi moduli ESP disponibili:
Durante le mie attività di formazione più volte mi è giunta la richiesta da persone non professioniste del settore elettronico o informatico, la realizzazione di progetti elettronici in grado di interagire via WiFi. Svolgere tale attività può richiedere competenze di livello più elevato che ovviamente tutti possono acquisire, ma per non aggiungere scoraggiamento nella fase iniziale di apprendimento ed invogliare sempre di più a sperimentare progetti sempre più complessi è forse bene partire da qualcosa di semplice che sono sicuro farà “esplodere” la vostra fantasia 🙂
Per questa breve introduzione utilizzerò: Arduino IDE, Blynk con scheda WeMos D1 Mini
Blynk
Avevo fatto una breve segnalazione tempo fa. Blynk è un’applicazione (per dirla in informatiche meglio parlare di freamework) che consente mediante dispositivi mobili (iOS e Android) utilizzando un sistema completamente grafico la realizzazione dei propri widget per comandare ad esempio l’azionamento via WiFi di dispositivi di automazione industriale o implementare progetti di domotica, ma anche di rilevare grandezze fisiche esterne e visualizzarle direttamente sul vostro dispositivo mobile.
Blynk può interagire con Arduino o Raspberry Pi se connessi ad una WiFi o a moltissimi dispositivi basati su ESP8266, modulo WiFi dotato di Input/Output General Purpose e processore ARM. Attualmente sono disponibili una grande quantità di board basate su ESP identificate tutti da un ID da ESP-01 a ESP-13 e la differenza tra una scheda e l’altra dipende dalla quantità di memoria disponibile, il numero di GPIO e il tipo di antenna WiFi.
Wemos D1 Mini
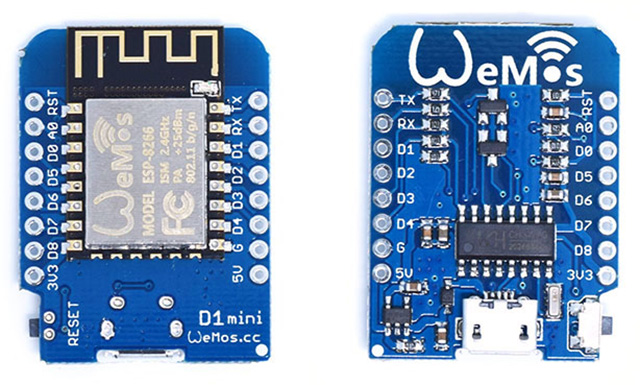
Per darvi un’idea di cosa è la Wemos D1 Mini si potrebbe fare la seguente analogia (non me ne vogliano i puristi mi serve solo per dare l’idea per chi incomincia), immaginate un Arduino micro dotato di una connessione WiFi ad un costo di non più di € 5 che potrà essere programmato in modo grafico con Blynk oppure attraverso l’IDE Arduino o ancora con NodeMCU (vedremo più avanti).
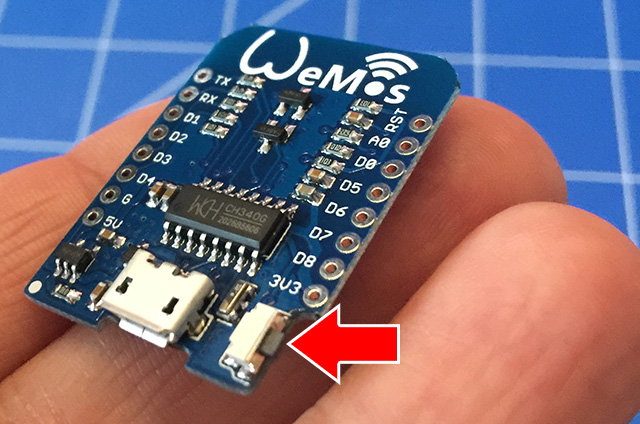
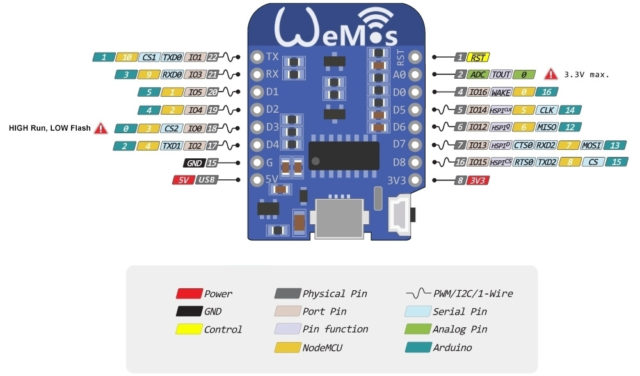
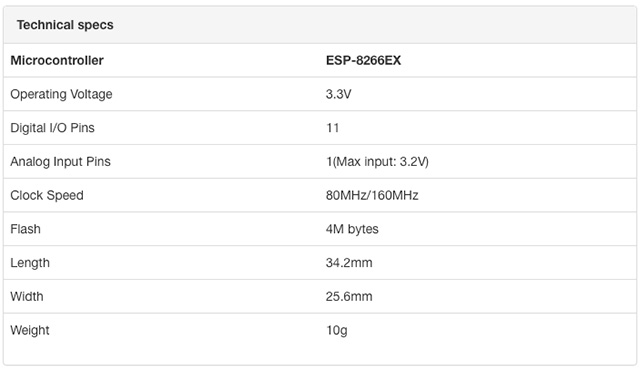
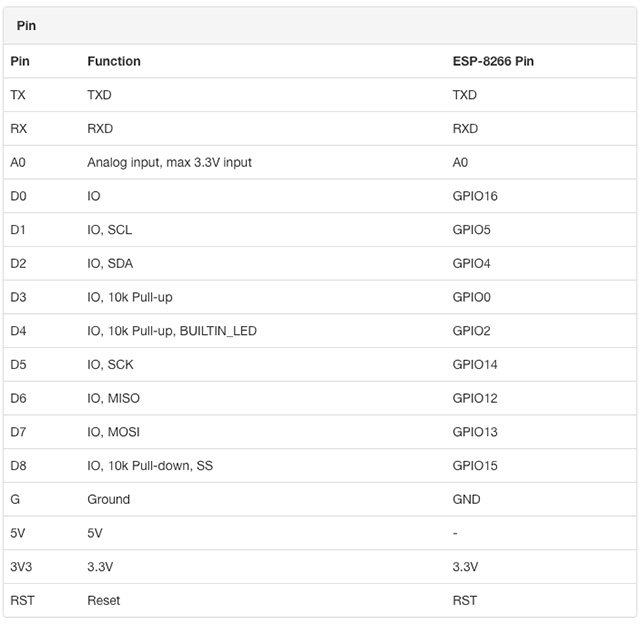
Wemos D1 Mini ospita un ESP-12F, dispone di 11 pin I/O digitali, 1 ingresso analogico, tutti i pin I/O gestiscono interrupt, pwm, I2C e ISP e tutti i pin I/O funzionano con una tensione di alimentazione di 3,3V e dispone di una memoria di 4MB.
Nell’immagine sopra riportata noterete che il nome usato sulla scheda è diverso da quello utilizzato nell’IDE di Arduino, fate riferimento ai numeri scritti in verde in fase di programmazione.
Come si evince dalle immagini sopra inserite la scheda è dotata di un connettore micro USB che vi permette di caricare gli sketch, ciò non accade per altre tipologie di schede che necessitano di un debugger per il caricamento di programmi.
On-line potete trovare su diversi store una serie di shield (per un elenco completo seguire il link) che possono esser impilati su questa piccolissima scheda.
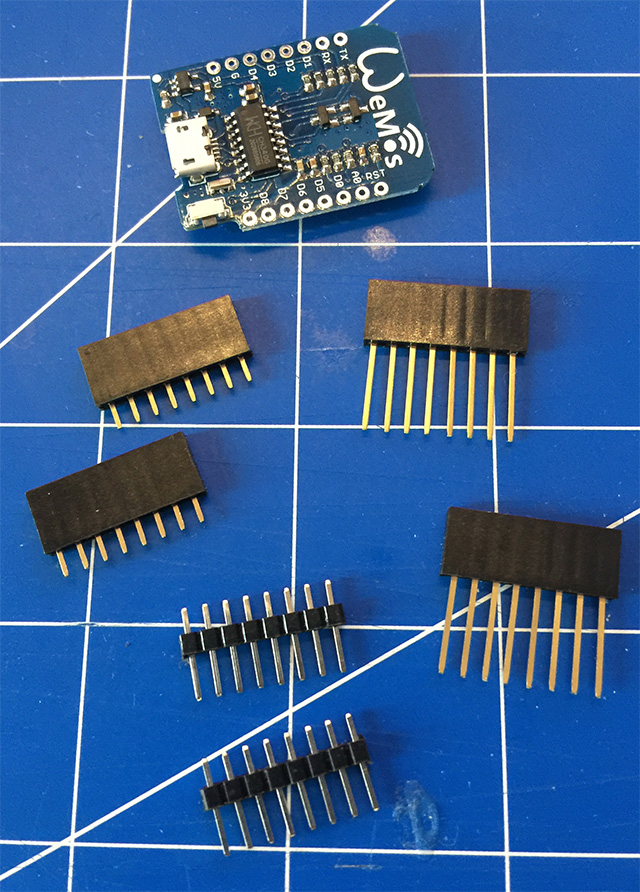
La scheda in genere viene venduta con diverse tipologie di pin header non saldati: maschio, femmina, femmina impilabile e ciò vi permette di adattarla ad ogni tipologia di circuito.
E’ presente un pulsante di reset
Sul pin analogico è possibile leggere tensioni fino a 3,2 V.
La conversione USB a UART viene realizzata dal chip CH340G (ben visibile nell’immagine sopra), presente su moltissimi cloni Arduino cinesi tra cui gli economicissimi Arduino nano. Gli utenti windows potranno procedere tranquillamente scaricando i driver dal seguente link su cui trovate anche i driver per MacOS X, però se avete l’ultima versione di MacOS X Sierra (10.12.x) utilizzate la procedura ben dettagliata a questo link. Sempre per gli utenti Mac, nel caso abbiate installato una precedente versione del driver seguite la procedura che trovate al seguente link.
Vedremo nei successivi passaggi l’utilizzo di WeMos D1 con l’Arduino IDE e con Blynk. Continua a leggere→










 M5Stack Fire è costituito da tre unità separabili. Nell’unità superiore è alloggia tutta l’elettronica principale, l’ESP32, l’antenna 2.4G, l’elettronica per la gestione dell’alimentazione, schermo LCD touch. La parte centrale è chiamata base M5GO, all’interno trova posto una batteria al litio, una presa M-BUS, due strisce LED RGB e altre due porte GROVE. La parte inferiore è adibita alla ricarica, può essere collegata alla base M5GO tramite pin POGO. All’interno dell’M5Stack si trova anche una IMU in grado di fornire la posizione nello spazio del dispositivo.
M5Stack Fire è costituito da tre unità separabili. Nell’unità superiore è alloggia tutta l’elettronica principale, l’ESP32, l’antenna 2.4G, l’elettronica per la gestione dell’alimentazione, schermo LCD touch. La parte centrale è chiamata base M5GO, all’interno trova posto una batteria al litio, una presa M-BUS, due strisce LED RGB e altre due porte GROVE. La parte inferiore è adibita alla ricarica, può essere collegata alla base M5GO tramite pin POGO. All’interno dell’M5Stack si trova anche una IMU in grado di fornire la posizione nello spazio del dispositivo.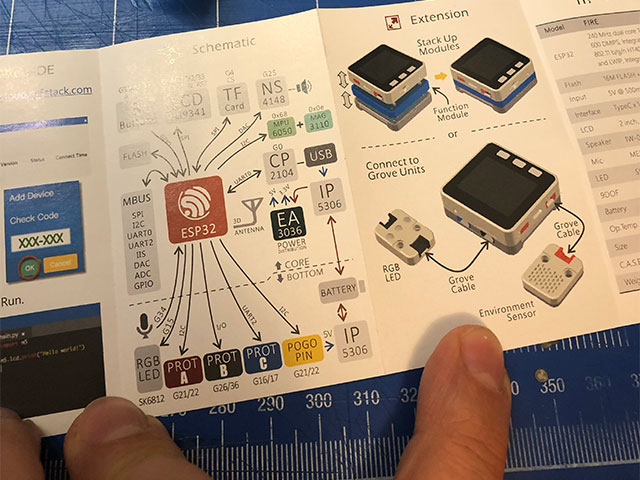
 La scheda in genere viene venduta con diverse tipologie di pin header non saldati: maschio, femmina, femmina impilabile e ciò vi permette di adattarla ad ogni tipologia di circuito.
La scheda in genere viene venduta con diverse tipologie di pin header non saldati: maschio, femmina, femmina impilabile e ciò vi permette di adattarla ad ogni tipologia di circuito.