Sto sviluppando da qualche giorno un progetto didattico un po’ “speciale” che vorrei portare in un evento scolastico tra qualche mese (spero di potervene parlare presto). In sintesi, si tratta di un controllo per micromotori, quelli tipici dei piccoli droni e, proprio per il vincolo di peso/ingombro a cui devo sottostare, mi sono orientato su componenti compatti: ESP32-C3 Super Mini e driver motore DRV8833.
Come sempre, mi interessa che il lavoro sia replicabile anche in altri contesti didattici: per questo ho deciso di trasformare le mie prove in una guida. In questa prima lezione facciamo un’introduzione completa alla scheda (pin, IDE, primi test), vediamo come controllare il led onboard e come controllare l’accensione del led sulla scheda attraverso una pagina web. Nelle lezioni successive aggiungerò ulteriori sperimentazioni legate all’uso di sensoristica specifica e al controllo di motori.
Guida introduttiva
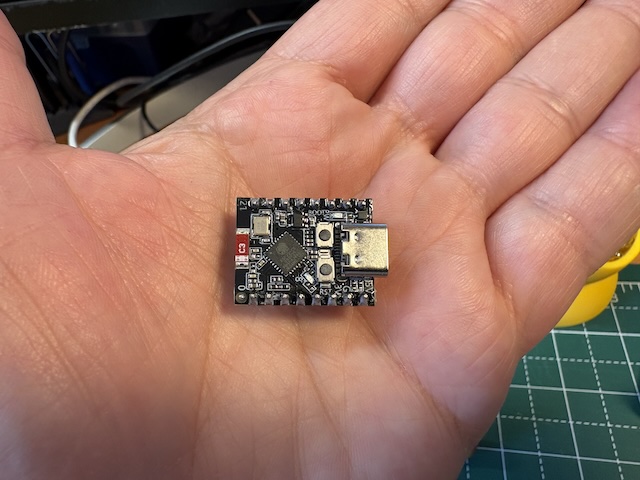
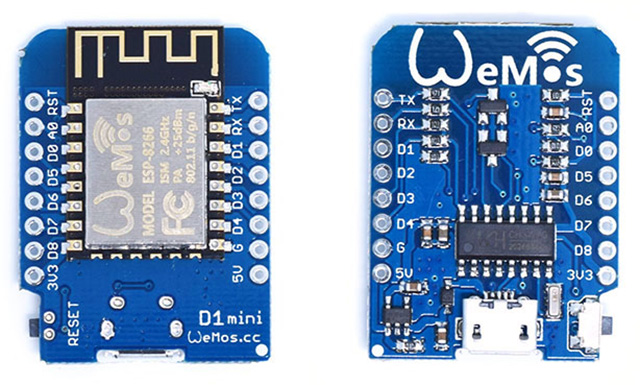
L’ESP32-C3 Super Mini è una scheda di sviluppo molto compatta basata sul chip Espressif ESP32-C3, appartenente alla famiglia ESP32. Rispetto a molte altre board ESP32, si distingue soprattutto per dimensioni ridotte e consumi molto contenuti in modalità deep sleep.
In questo tutorial vedremo cos’è l’ESP32-C3 Super Mini, quali sono le sue caratteristiche principali e il suo pinout, come si programma con Arduino IDE e come eseguire alcuni esempi rapidi per verificare che tutto funzioni correttamente.
L’ESP32-C3 Super Mini integra il chip ESP32-C3 con Wi-Fi e Bluetooth a bordo. A differenza di altri modelli della famiglia, qui parliamo di un chip single-core. Il formato è molto ridotto ed è pensato per lavorare bene anche in scenari a basso consumo: secondo datasheet, in deep sleep può arrivare a circa 43 µA.
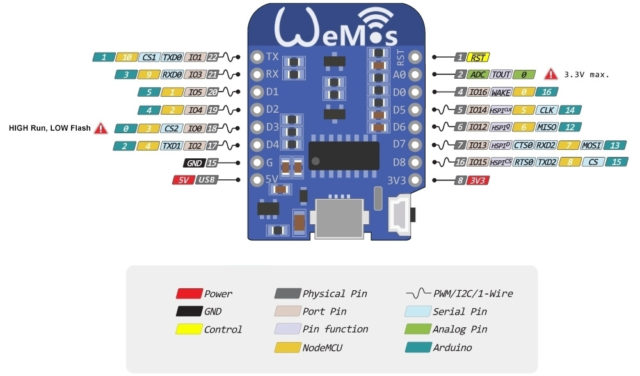
La board dispone di 16 pin, di cui 11 GPIO programmabili; questi GPIO supportano funzioni come ADC, PWM, UART, I2C e SPI.
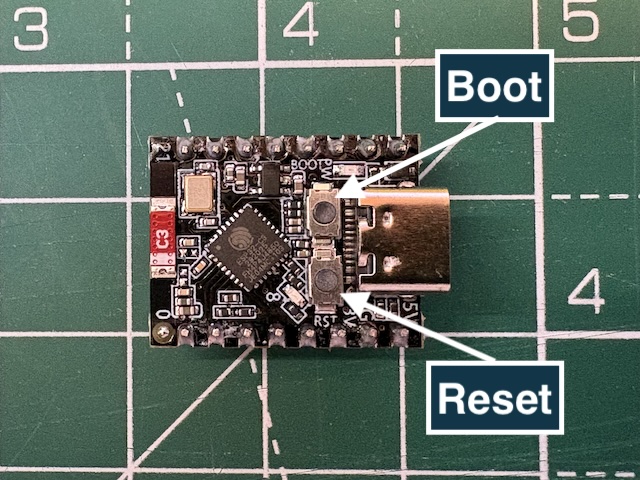
Sono presenti due pulsanti: RST (reset) e BOOT. Il pulsante BOOT serve per entrare in modalità bootloader (utile quando dovete caricare il firmware), mentre RST riavvia la scheda, comodo per far ripartire subito lo sketch appena caricato.
È disponibile anche una porta USB-C, utilizzabile per alimentazione, upload del codice e comunicazione seriale. In alternativa, potete alimentare la scheda con un 5 V esterno usando i pin 5V e GND; in questo caso, è importante non usare contemporaneamente anche la USB-C.
Come su molte schede ESP32, è presente un LED onboard. Qui però è collegato a GPIO 8 (non a GPIO 2, come succede spesso su altre board).
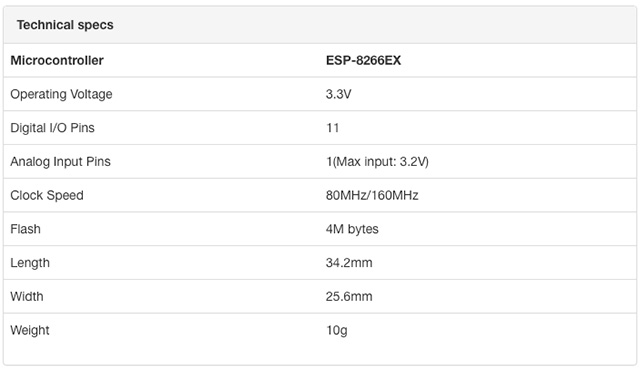
Specifiche tecniche
- Processore: CPU RISC-V 32 bit fino a 160 MHz
- Wi-Fi IEEE 802.11 b/g/n e Bluetooth 5 (LE)
- 400 KB SRAM, 384 KB ROM, 4 MB flash integrata
- Antenna SMD compatta
- 11 GPIO con supporto a:
- DC (4 pin)
- PWM
- UART
- I2C
- SPI
- LED integrato su GPIO 8
- Pulsanti Reset e Boot
- Consumo molto basso: fino a 43 µA in deep sleep
- Form factor ridotto
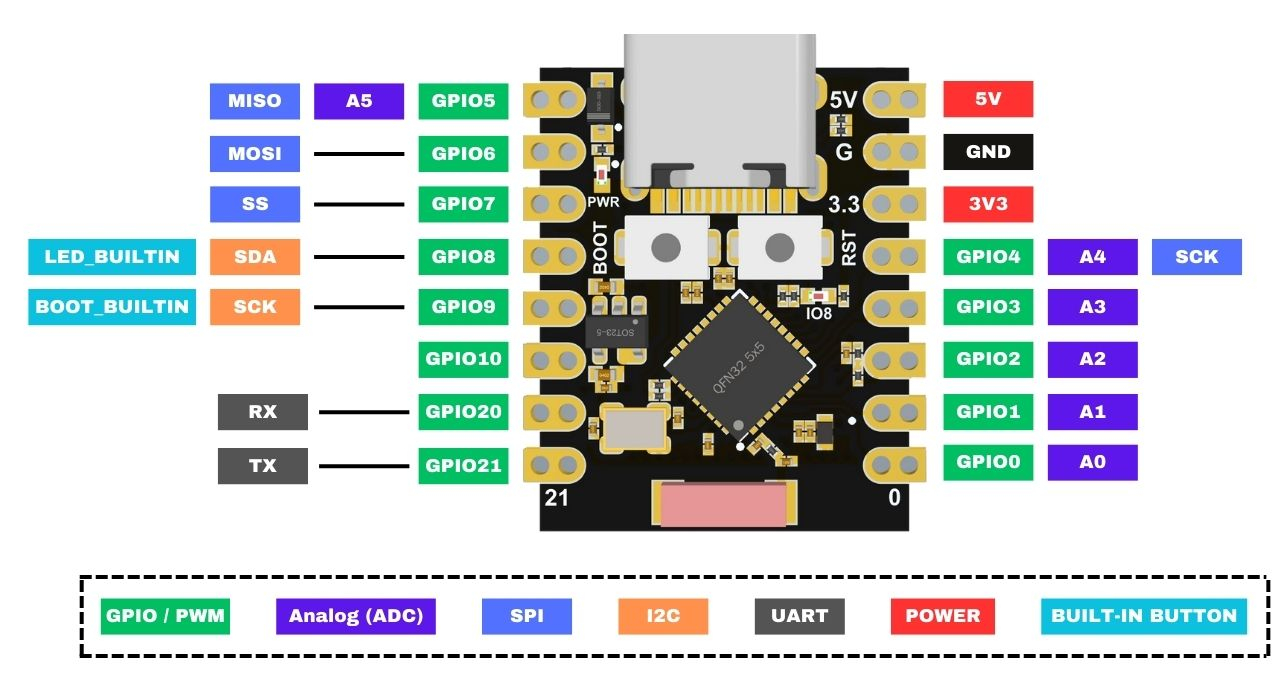
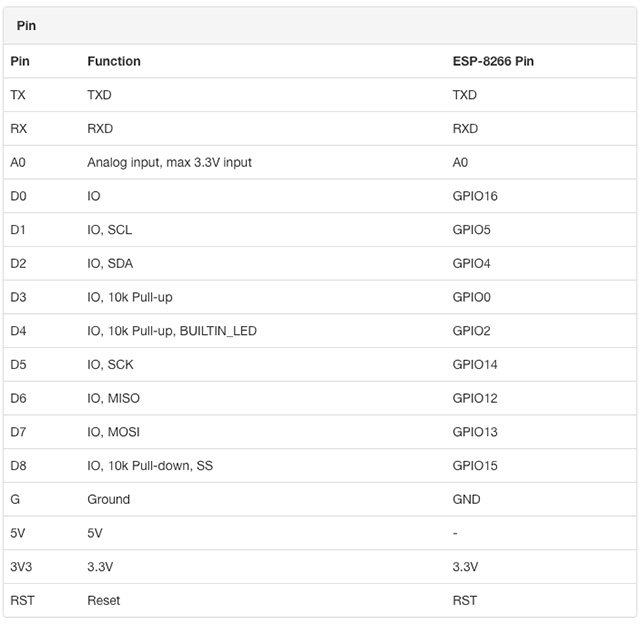
Tabella riassuntiva delle specifiche
| Voce | Dettagli |
|---|---|
| Microcontrollore (processore) | Espressif ESP32-C3 (RISC-V 32-bit single-core, fino a 160 MHz) |
| Memoria Flash | 4 MB (flash SPI integrata) |
| SRAM | 400 KB |
| ROM | 384 KB |
| Wi-Fi | 802.11 b/g/n, 2.4 GHz, fino a 150 Mbps |
| Bluetooth | Bluetooth 5.0 LE |
| Pin GPIO | 11 GPIO accessibili |
| Ingressi analogici (ADC) | 2 × ADC SAR a 12 bit, fino a 6 canali |
| Canali PWM | 6 canali |
| SPI | 3 × interfacce SPI (SPI0, SPI1 riservate) |
| I2C | 1 × interfaccia I2C |
| UART | 2 × interfacce UART |
| I2S | 1 × interfaccia I2S |
| Interfaccia USB | USB-C, supporta USB CDC |
| Alimentazione | 5V via USB-C oppure 3.3V–6V via pin VIN (5V); regolatore 3,3V integrato (fino a 500 mA) |
| Tensione di funzionamento | 3,3V (livello logico per i GPIO) |
| Modalità Deep Sleep | 43uA |
| Pulsanti | 1 × pulsante Reset, 1 × pulsante Boot (GPIO9) |
| LED | 1 × LED integrato (su GPIO8, attivo basso) |
| Programmazione | Arduino IDE, ESP-IDF, MicroPython, PlatformIO/pioarduino |
Strapping pin
Alcuni GPIO hanno un ruolo speciale durante avvio/reset (boot strap). In particolare:
- GPIO 2: usato come strapping per entrare in bootloader – meglio evitarlo per uso generico.
- GPIO 8: collegato al LED blu integrato (logica invertita / attivo LOW) ed è anche strapping.
- GPIO 9: collegato al pulsante BOOT – da evitare per uso “tranquillo” nei progetti.
È possibile usare comunque questi pin, ma va considerato che, durante reset o ingresso in bootloader, il loro stato può cambiare temporaneamente e questo può interferire con circuiti collegati.
Pin di alimentazione
Per l’alimentazione disponete:
- 5V
- 3V3
- GND
Il pin 3V3 può fornire 3,3 V dal regolatore onboard oppure ricevere 3,3 V da un’alimentazione esterna. Il pin 5V può essere usato come ingresso per alimentare la scheda, oppure come uscita dei 5 V provenienti dalla USB.
Pin analogici (ADC)
I GPIO 0, 1, 2, 3, 4 e 5 supportano lettura analogica:
- GPIO 0: ADC1_CH0
- GPIO 1: ADC1_CH1
- GPIO 2: ADC1_CH2
- GPIO 3: ADC1_CH3
- GPIO 4: ADC1_CH4
- GPIO 5: ADC1_CH5
PWM
Tutti i GPIO “general purpose” possono generare segnali PWM.
UART, I2C e SPI
Grazie al multiplexing dell’ESP32, le periferiche UART, SPI e I2C possono essere mappate su diversi GPIO.
Detto questo, in Arduino IDE i pin “di default” non sono universali: dipendono dalla board/variant selezionata (i file variant/pins_arduino.h del core Arduino-ESP32).
Per ESP32-C3 SuperMini (e, in generale, per il profilo ESP32C3 del core Arduino-ESP32) i default sono:
- UART: GPIO 20 (RX) e GPIO 21 (TX)
- SPI: GPIO 6 (MISO), GPIO 7 (MOSI), GPIO 10 (SCK) e GPIO 5 (SS)
- I2C: GPIO 8 (SDA) e GPIO 9 (SCL)
Nota: su SuperMini GPIO 8 è anche il pin del LED integrato e GPIO 9 è legato al tasto BOOT; se usi I2C su 8/9 e noti comportamenti strani, conviene rimappare I2C su altri pin.
Remapping (rimappare i pin)
L’ESP32 (anche C3) supporta il remapping: in pratica SPI può essere spostata su altri GPIO.
Questo però non cambia automaticamente i “default”: quelli restano quelli definiti dalla variant della board selezionata nell’IDE.
Per evitare ambiguità (e prevenire librerie che assumono pin diversi), potete inizializzare SPI indicando esplicitamente i pin:
#include // firma: begin(sck, miso, mosi, ss) SPI.begin(4, 5, 6, 7);
Aggiornamento: in una versione precedente di questa pagina era riportata un’indicazione errata sui pin SPI “di default”. Grazie a chi l’ha segnalato (nei commenti a questo post): per ESP32-C3 SuperMini i default del core Arduino-ESP32 sono SCK=GPIO4, MISO=GPIO5, MOSI=GPIO6, SS=GPIO7.
Continua a leggere


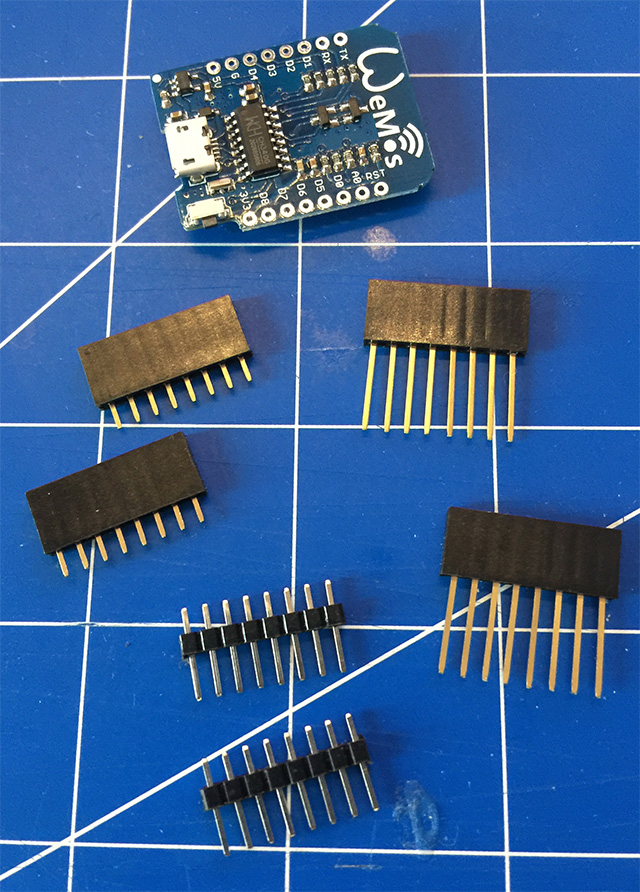
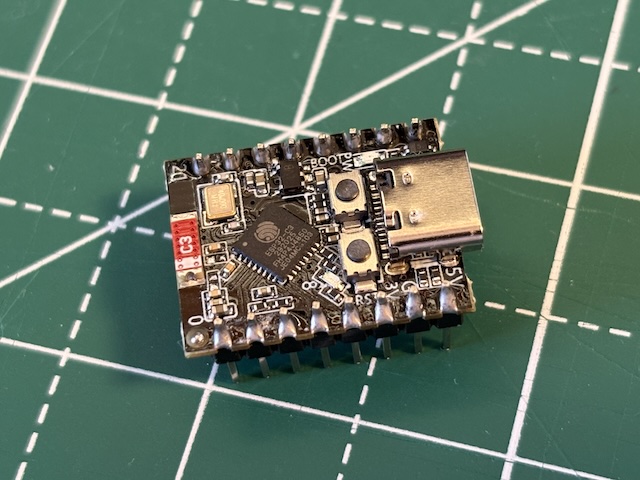
 La scheda in genere viene venduta con diverse tipologie di pin header non saldati: maschio, femmina, femmina impilabile e ciò vi permette di adattarla ad ogni tipologia di circuito.
La scheda in genere viene venduta con diverse tipologie di pin header non saldati: maschio, femmina, femmina impilabile e ciò vi permette di adattarla ad ogni tipologia di circuito.