Dal concetto alla pratica: materiali strutturati per imparare, insegnare e costruire

Da molti anni pubblico su questo sito articoli, tutorial, esperienze di laboratorio, attività STEAM, percorsi con microcontrollori, robotica, stampa 3D, coding, elettronica e strumenti digitali per la didattica.
Chi segue queste pagine lo sa bene: il filo conduttore è sempre stato lo stesso. Cercare di rendere più chiari i concetti, più accessibili le tecnologie e più concreta l’esperienza di apprendimento.
In queste ultime settimane, però, molti avranno notato un cambiamento nel ritmo di pubblicazione. Sono passato da una pubblicazione quasi giornaliera a una presenza meno regolare, più discontinua. Questa alternanza non nasce da una perdita di interesse, ma da due motivi principali.
Il primo è molto concreto: l’impegno didattico a scuola, che richiede tempo, attenzione ed energie.
Il secondo riguarda invece una riflessione più ampia che porto avanti da tempo: il desiderio di ristrutturare il lavoro sul sito, andando oltre il singolo tutorial e costruendo contenuti con una maggiore valenza didattica, pratica e formativa.
In questi anni ho pubblicato molte guide operative. Alcune sono nate per rispondere a esigenze dei miei studenti, altre per documentare attività svolte in laboratorio, altre ancora per aiutare docenti, maker e appassionati a orientarsi tra strumenti, componenti, schede elettroniche e tecnologie digitali.
Con il tempo, però, è diventata sempre più evidente una necessità: non bastano sempre idee, spunti o tutorial isolati. Spesso servono materiali più strutturati: lezioni organizzate, attività già pensate per il lavoro reale in classe o in laboratorio, percorsi progressivi, schede operative, strumenti di verifica, indicazioni per evitare gli errori più frequenti.
A questo si aggiunge un altro aspetto. Molte persone mi chiedono un supporto più continuativo per i loro progetti, per attività scolastiche, corsi, prototipi, percorsi didattici o soluzioni tecniche. Mi fa piacere, perché significa che il lavoro svolto in questi anni è stato utile. Allo stesso tempo, però, le richieste sono tante e non sempre riesco a seguirle come vorrei.
Capita anche di ritrovare materiali, idee, spiegazioni o strutture nate da questi articoli all’interno di siti, dispense, corsi o libri di testo. Da un lato è una soddisfazione: vuol dire che quei contenuti circolano e vengono considerati utili, dall’altro lato, però, dietro ogni articolo c’è un lavoro importante: studio, progettazione, scrittura, revisione, immagini, schemi, prove pratiche e adattamento didattico.
Spesso ricevo messaggi molto gentili, del tipo: “Grazie Michele, la tua guida mi è stata utilissima, mi ha permesso di completare un progetto per un cliente” oppure “I tuoi tutorial mi hanno aiutato molte volte a risolvere problemi pratici”. Sono parole che fanno piacere, naturalmente, ma, nella pratica, tutto questo resta spesso una bella pacca sulla spalla e poco più.
Per diverso tempo ho provato a immaginare soluzioni alternative: lezioni singole, incontri in presenza, attività su richiesta, materiali ad accesso libero con eventuale offerta volontaria. Sono strade interessanti, ma difficili da organizzare in modo stabile, soprattutto quando si vuole mantenere una qualità alta e una continuità reale.
Per questo sono arrivato a una svolta.
Dopo molto tempo passato a pensare, progettare e riorganizzare le idee, ho deciso di impostare il lavoro in modo diverso, mantenendo il sito gratuito come spazio aperto di divulgazione, riflessione e condivisione, e affiancandogli un’area Premium dedicata ai materiali più strutturati.
L’area Premium non sarà semplicemente un archivio di articoli più lunghi. Sarà uno spazio in cui raccogliere lezioni operative, corsi, laboratori guidati, schede, materiali per studenti, strumenti per docenti e percorsi già pensati per essere utilizzati, adattati e portati in classe o in laboratorio.
L’idea è far confluire progressivamente in questo spazio anche i materiali che sviluppo per la scuola, per i corsi in presenza, per i webinar e per le attività formative rivolte ai docenti. Non saranno materiali caricati così come sono, ma contenuti ristrutturati, ordinati e resi immediatamente utilizzabili.
Il sito gratuito continuerà quindi a essere il punto di partenza. L’area Premium diventerà lo spazio di approfondimento operativo.
Il principio rimarrà lo stesso che ha guidato il lavoro di questi anni:
capire, sperimentare, misurare, costruire, documentare.
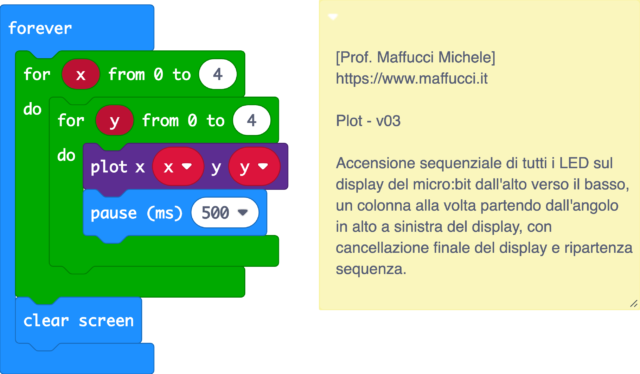
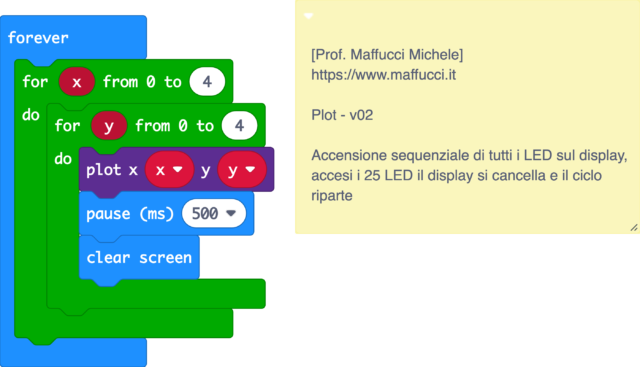
 Nel corso delle nostre avventure creative durante il corso “Carta, Cartone e Coding”, abbiamo esplorato attività in cui la creatività e l’arte incontra la tecnologia, trasformando idee astratte in realtà tangibili. Uno degli strumenti che abbiamo utilizzato per dare vita alle nostre creazioni è il BBC micro:bit.
Nel corso delle nostre avventure creative durante il corso “Carta, Cartone e Coding”, abbiamo esplorato attività in cui la creatività e l’arte incontra la tecnologia, trasformando idee astratte in realtà tangibili. Uno degli strumenti che abbiamo utilizzato per dare vita alle nostre creazioni è il BBC micro:bit.