Sto svolgendo in questi giorni il corso sulla didattica laboratoriale e nelle giornata di ieri ho svolto un approfondimento sull’uso delle funzioni con il MakeCode editor di micro:bit che rendo pubblico su questo sito.
NOTA. Gli esempi in questo post hanno il solo scopo di mostrare l’utilizzo delle funzioni (chiamata di una funzione, passaggio per valore, restituzione di un valore da una funzione, ecc…) e non quello di risolvere un specifico problema, pertanto gli esempi potrebbero essere realizzati in modalità sicuramente più efficiente.
Le funzioni con BBC micro:bit
Una funzione consente di creare una porzione di codice che possiamo riutilizzare più volte nel nostro programma, quindi invece di copiare lo stesso codice in molte sezioni del programma, possiamo semplicemente utilizzare un unico blocco funzione da utilizzare all’interno del nostro codice tutte le volte che ci necessita.
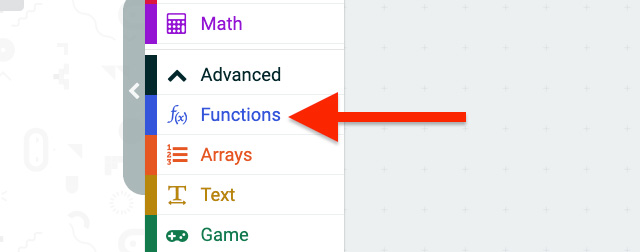
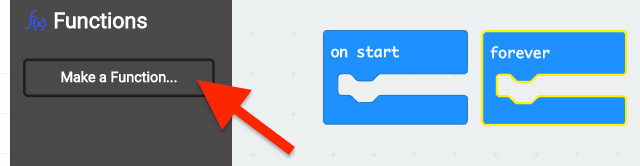
Una funzione è definita dal suo nome e dal corpo della funzione che ospita tutte le istruzioni.

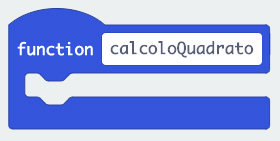
La funzione ha un nome univoco e non può essere costituita da parole staccate tra loro. E’ utile assegnare alle funzioni nomi che specificano cosa fa la funzione, ad esempio “calcoloVolume”, “calcoloArea”, “distanzaOstacolo”, “impostaLed”, “displayOn”. Si consiglia inoltre di adottare una notazione camel case (testo a cammello), ovvero scrivere parole composte o frasi, come il nome di funzioni, unendo tutte le parole tra loro, ma lasciando le loro iniziali con lettera maiuscola, in questo modo viene meglio decodificato da un essere umano il significato del nome composto. E’ buona regola adottare una strategia di questo genere anche per il nome delle variabili.
La prima lettera della frase può essere maiuscola o minuscola, tendenzialmente si preferisce usare la lettera minuscola.
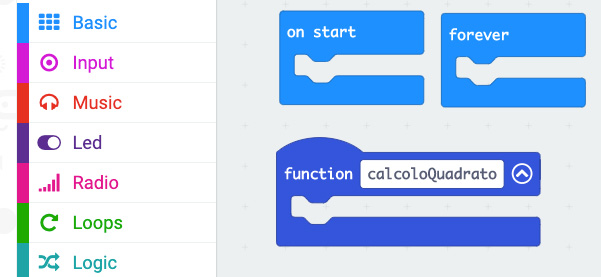
Il corpo della funzione è il codice all’interno del blocco funzione, quello che viene chiamato body.
Continua a leggere→

 Si conclude oggi il PCTO della mia 3B Automazione. Periodo didattico travagliato, fatto di mille intoppi dovuti a questa pandemia, alternanza tra didattica a distanza e in presenza, a settimane alterne e non. Un anno faticoso per i ragazzi e per noi docenti. Condurre il PCTO nelle varie classi è stato molto complicato, ma tra le classi che ho seguito anche la mia 3B Automazione ha concluso oggi il percorso.
Si conclude oggi il PCTO della mia 3B Automazione. Periodo didattico travagliato, fatto di mille intoppi dovuti a questa pandemia, alternanza tra didattica a distanza e in presenza, a settimane alterne e non. Un anno faticoso per i ragazzi e per noi docenti. Condurre il PCTO nelle varie classi è stato molto complicato, ma tra le classi che ho seguito anche la mia 3B Automazione ha concluso oggi il percorso.