Le motivazioni della creazione di un escape game di questo tipo sono le medesime di quelle indicate nel post indicato sopra.
Questa attività è il primo tassello di un percorso più ampio che presenterò nel mio prossimo corso per Tecnica della Scuola, “Carta, Cartone e Coding“, il corso a fine ottobre, con contenuti aggiornati rispetto alle edizioni precedenti. Se vi interessa restare informati, iscrivetevi alle novità tramite il box: “Iscriviti al blog tramite email” che trovate nella colonna destra del sito.
Condivido anche il Google Site che ospita il gioco: ho mantenuto un’ambientazione fantascientifica perché è lo stile che preferisco, ma ovviamente potete personalizzarla a piacere. Il nome Aurora-β richiama un mio precedente escape, Aurora-α.
Sono contento di condividere con voi EduRobot MicroMoto, nato durante lo svolgimento di un corso per insegnanti della scuola primaria e secondaria di primo grado ed è un mio esempio di come la tecnologia possa essere inclusiva e stimolante utilizzando strumenti semplici.
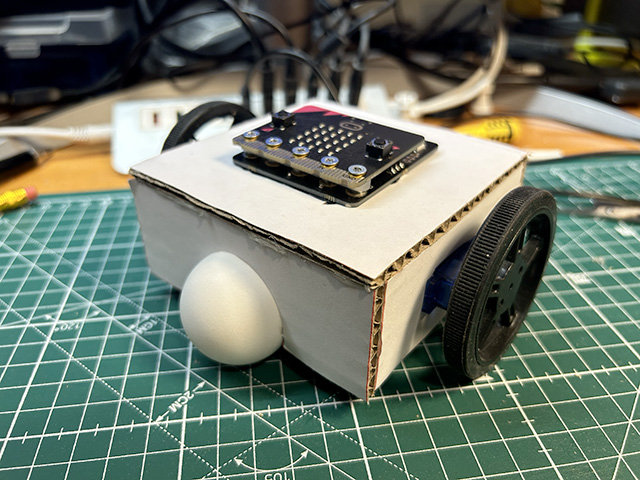
Probabilmente la parola che meglio di tutte descrive questo progetto è: “semplicità”, sia nella costruzione che nell’utilizzo.
Volutamente compatto e simmetrico, le dimensioni sono di 10×10 cm, ha la forma di una scatolina, le cui falde sono state unite con colla a caldo. Questa scelta di assemblaggio, suggerita dai colleghi della primaria, ha reso il processo di assemblaggio non solo più sicuro ma anche più rapido rispetto alla prima versione in cui utilizzavo viti, ciò ha semplificato e velocizzato la fase costruttiva.
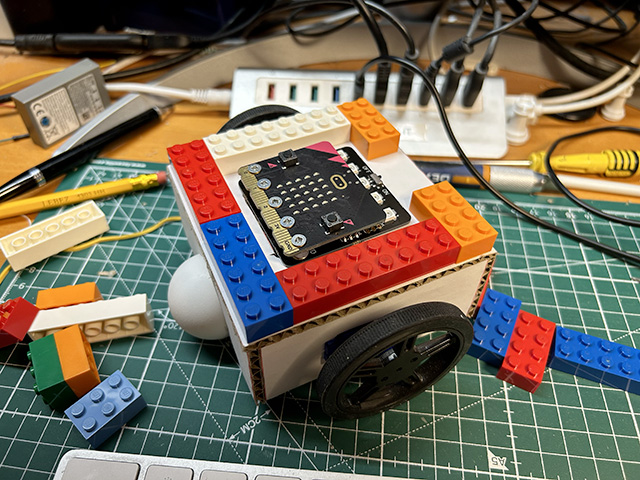
L’uso del cartone rende agevole l’espandibilità e la personalizzazione, infatti si parte da una base di cartone da 4 mm di spessore, ricoperta da un foglio bianco con stampati i contorni per il taglio, in questo modo gli studenti possono dare sfogo alla loro creatività colorando e personalizzando le facce bianche. Inoltre come mostrate nelle immagini che seguono MicroMoto può essere migliorato incollando sulle sue facce blocchetti Lego, permettendo così di adattarlo a diverse necessità didattiche.
Il piccolo robot è controllato da BBC micro:bit ed il controllo motori è affidato a :MOVE di Kitronik, una soluzione intuitiva che permette una facile gestione dei servomotori a rotazione continua. Questi ultimi, fissati alla struttura senza viti ma con l’ausilio di elastici, conferiscono al robot una grande praticità di montaggio e manutenzione.
Ovviamente potranno essere utilizzate anche altre tipologie di schede di controllo, una versione che sto realizzando per un altro corso prevede l’utilizzo di una scheda Arduino.
Condivido il file PDF con le 5 facce di taglio. Io ho utilizzato un foglio bianco A4 adesivo, ma potete utilizzare un normalissimo foglio di carta che incollerete con la colla sul cartone.
Se volete insieme a me costruire il robot nei prossimi mesi organizzerò un corso in presenza per insegnanti in cui mostrerò come realizzare e programmare EduRobot MicroMoto, se siete interessati potete seguire il link per la preadesione, sarete da me ricontattati quando il corso sarà disponibile.
Di seguito le fasi di costruzione EduRobot MicroMoto.
Procurarsi un foglio di carta A4 e stampare il profilo di taglio.
Diversi mesi fa mi venne chiesto di sviluppare un corso di base per la realizzazione di sistemi IoT per colleghi che lavorano nei licei. Come spesso accade molte delle sperimentazioni che propongo durante i miei corsi sono derivate da attività laboratoriali svolte con i miei studenti. In più occasioni mi è stato chiesto di pubblicare tutorial in merito all’IoT e recentemente i colleghi che seguiranno il mio prossimo corso: Realizzare laboratori green con il Making e il Coding – 3 ed. mi hanno chiesto esplicitamente di mostrare come costruire attività laboratoriali semplici in cui ci fossero componenti IoT che permettono di controllare remotamente su smartphone la nostra serra o il nostro sistema di controllo ambientale, pertanto a corredo del corso online che inizierà tra breve aggiungerò una serie di guide “IoT” su questo sito aperte a tutti.
La guide saranno utilizzate per estendere le funzionalità delle automazioni che verranno realizzate durante le lezioni, saranno pubblicate nell’arco della durata del corso e secondo le necessità didattiche dei singoli utenti iscritti, potranno essere personalizzate e rese fruibili ai propri studenti.
Sicuramente tra le piattaforme più semplici per connettere dispositivi IoT che possiamo trovare online Blynk IoT è la più usata e conosciuta.
Con Blynk IoT possiamo controllare remotamente il nostro hardware, visualizzare i dati rilevati dai sensori, creare dei datalogger e molto altro. Abbiamo visto sempre su questo sito in passato l’uso di ThingSpeak con BBC micro:bit ed un ESP01 e in questa serie di brevi tutorial, vedremo come utilizzare un WeMos D1 R2 mini per realizzare gli esercizi di base che poi ci consentiranno di controllare remotamente i nostri dispositivi come ad esempio un sistema per la misura dell’inquinamento derivante dalle polveri sottili. Non mi dilunghero sulla modalità di utilizzo del WeMos D1 R2 mini su queste pagine trovate indicazioni.
Per chi avesse altri dispositivi compatibili con la piattaforma Blynk IoT diversi da quello che utilizzo negli esercizi proposti, la procedura di installazione e programmazione è simile, nel caso di differenze fornirò indicazioni.
Agli iscritti al corso darò informazioni specifiche sull’uso di Blynk IoT con BBC micro:bit e Arduino Nano 33 IoT ed altre piattaforme.
La semplicità e la praticità di BlynkIoT risiede nel fatto che è possibile costruire rapidamente un’interfaccia grafica sul proprio dispositivo iOS e Android al fine di controllare e monitorare i propri progetti. Qundi potrete creare una vostra dashboard virtuale (un centro di controllo grafico) costituto da pulsanti, slider, grafici e molto altro da disporre sullo schermo del vostro dispositivo. All’interno dell’applicazione esistono Widget specifici per il controllo della vostra automazione.
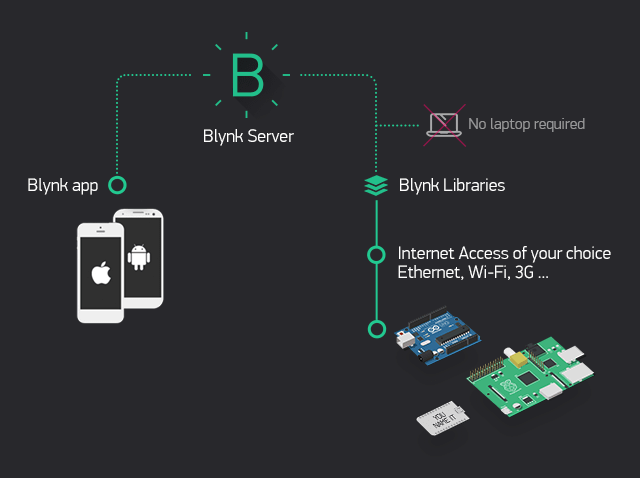
Tre sono le componenti fondamentali del sistema Blynk IoT:
Applicazione Blynk: applicazione sul vostro smartphone che mediante i widget forniti permette di creare l’interfaccia grafica per controllare la vostra automazione.
Server Blynk: il servizio che gestisce la comunicazione tra l’hardware e il vostro smartphone.
Librerie Blynk: permettono di gestire i comandi in ingresso tra la vostra piattaforma hardware: micro:bit, WeMos D1 mini, Arduino, ecc… e il server Blynk.
Durante le esercitazioni analizzeremo le caratteristiche di Blynk ma una cosa importante da sapere subito è che la connessione al cloud può avvenire in diverse modalità: Ethernet, Wi-Fi, USB, GSM, Bluetooth, BLE. Continua a leggere→
In occasione del corso: creare un kit di robotica educativa a basso costo – 3′ edizione rendo pubblico il progetto del “Ciao Ciao Box” un dispositivo che è stato realizzato con BBC micro:bit V2 pensato per allievi della scuola elementare e media. Come annunciato recentemente sui vari social sto sviluppando una versione su cui sarà possibile bloccare magneticamente, con viti o con mattoncini Lego altri oggetti o scatole interattive programmabili.
Come potete intuire questo tipo di interazione potrà avvenire anche con altri Microcontrollori, ma la semplicità di programmazione di micro:bit rende la realizzazione di questo scatola interattiva interessante con gli studenti più giovani.
Ma come realizzare questo tipo di oggetto?
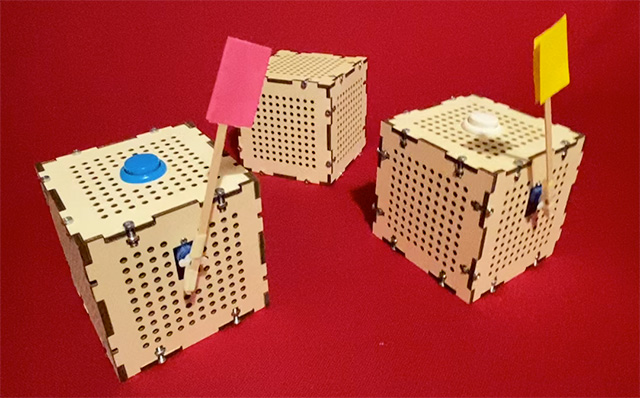
Innanzitutto l’interazione che mostro in questa lezione è tra due box con bandiera, il cui movimento è realizzato da un piccolo servomotore SG90 ed un terzo box che ha l’unico scopo di emettere un suono che sarà diverso in funzione del box trasmittente.
Quindi 3 box con le seguenti funzionalità:
box 1 emettitore suono. Emette suoni diversi in funzione del box che muove la bandiera
box 2 invio messaggio “muovi bandiera” al box 3 e nel contempo può ricevere il messaggio “muovi bandiera” dal box 3
box 3 invio messaggio “muovi bandiera” al box 2 e nel contempo può ricevere il messaggio “muovi bandiera” dal box 2
Perché usare il box 1 per emettere un suono?
Intuitivamente si potrebbe si potrebbe essere portati a pensare che questa funzionalità poteva essere riprodotta dal box 2 e dal box 3, ma ciò non è possibile.
La gestione del servomotore e nel contempo dell’emissione del suono non può essere fatta contemporaneamente in quanto il comportamento dei due dispositivi elettronici non risponde ai comandi impartiti dalla programmazione. Dal puntosi vista tecnico è presente un unico timer che gestisce il ciclo di funzionamento e il timer può essere usato o dal servomotore o dal buzzer non da entrambi.
Per evitare il comportamento anomalo viene demandata l’emissione del suono al box 1.
Il progetto pertanto potrebbe essere realizzato con un micro:bit V2 dotato di buzzer e due microbit V1 a cui demandiamo il controllo dei servomotori.
Ovviamente se disponete di soli micro:bit V1 potrete connettere un buzzer esterno al micro:bit inserito nel box 1, per questa operazione fate riferimento alle schede di progetto condivise su questo sito.
Struttura del box
Si tratta di un cubo 10×10 cm. La realizzazione dei box può essere fatta con qualsiasi materiale: cartone, compensato, foam. Potreste anche riciclare scatole di alimenti: latte, pasta, sale ecc…
Per chi desidera realizzare le medesime scatole che vedete nell’immagine introduttiva di questa lezione condivido il file pdf che potrà essere utilizzato per tagliare a laser tutte le facce del cubo in cui troverete gli inserti per i pulsanti e i servomotori.
Per chi invece non può utilizzare una macchina a taglio laser condivido il file pdf delle facce del cubo su cui poi voi dovrete realizzare i fori per l’inserimento dei pulsanti e dei servomotori.
Materiali utilizzati
Tutti i materiali potete trovarli su qualsiasi store online e la quasi totalità di quelli in eleco li trovate su Amazon.
Compensato spessore 3 mm (se costruite i box in compensato)
Pulsanti 6 colori 12×24 mm
Servomotori SG90 (0°-180°)
Edge Connector Breakout Board per micro:bit
Jumper corti maschio/maschio (fili da usare per la breadboard)
mini breadboard da 170 punti
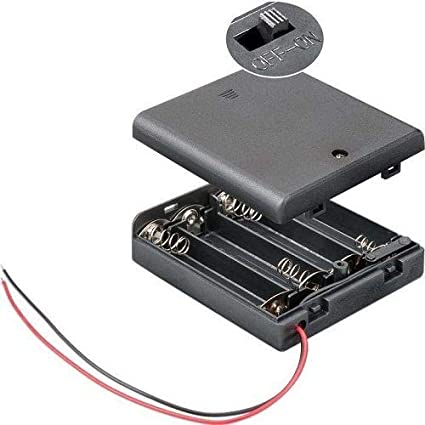
Contenitore 4 batterie AA da 1,5 V con interruttore
Fogli di cartone ondulato formato A4 da 4 mm di spessore
Viti M3 12 mm e dadi M3
Collegamenti
Box 1
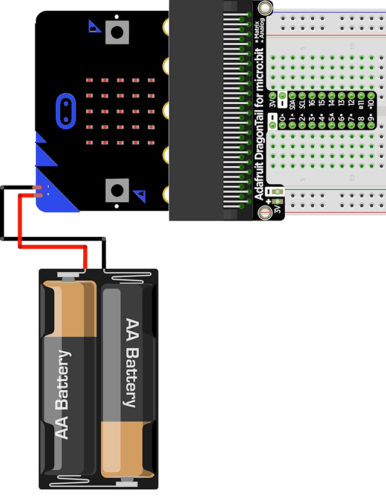
Si suppone in questo circuito l’utilizzo di un micro:bit V2
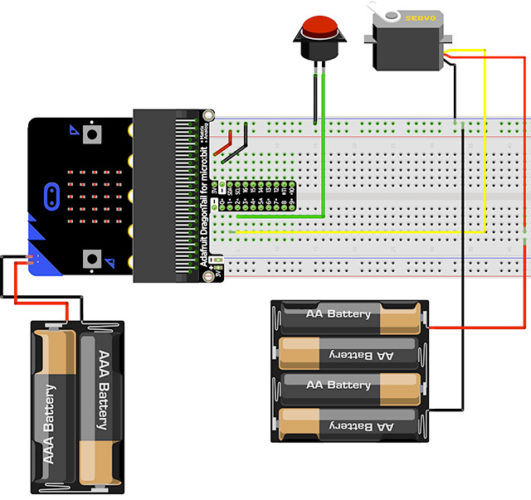
Box 2
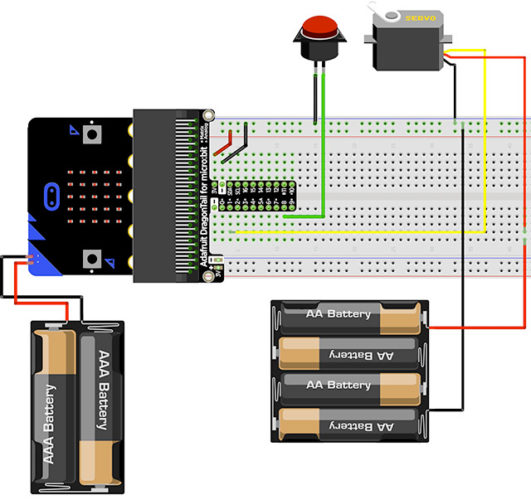
Box 3
Come potete notare i circuiti per il box 2 e 3 differiscono solamente per il pin a cui connettiamo il pulsante.
E’ essenziale notare due cose:
il micro:bit e il servomotore sono alimentati da due batterie diverse, il micro:bit a 3V mentre il servomotore con un pacco batterie da 6V. Il positivo del servomotore va solamente collegato al pacco batterie da 6V
Le masse dei due pacchi batterie sono comuni, si noti il collegamento a massa del micro:bit sulla breadboard e quello del servomotore al pacco batterie.
E’ possibile evitare il pacco batterie da 3V, ma per questa operazione è necessario effettuare una modifica al cavo micro USB utilizzato per connettere il micro:bit al computer, ma demando questa spiegazione ad una prossima lezione.
Per i colleghi che seguono il mio corso darò ulteriori dettagli tecnici e alternative di progettazione.
Programmazione
All’interno del codice condiviso troverete alcune indicazioni sul funzionamento, essenziale porre estrema attenzione al codice dei Box 2 e 3 in cui nel blocco “on start” ho abilitato le resistenze di pull-up sui pin 2 e 8 del micro:bit, questa operazione eviterà di utilizzare due resistori esterni di pull-up connessi al pulsante.
In questa sperimentazione, per i box 2 e 3 ho utilizzato un solo pulsante, lascio a voi le modifiche del circuito e la programmazione per abilitare il funzionamento del secondo pulsante.
Consiglio, per i box 2 e 3 di effettuare il trasferimento del codice sul micro:bit senza connettere il micro:bit all’edge connector, una volta effettuato il trasferimento del programma, scollegatelo dal computer ed inseritelo all’interno dell’edge connector.
Programmazione box1
Programmazione box 2 e 3
Maggiori dettagli su collegamenti e funzionalità da aggiungere durante il corso in presenza.
Sto realizzando una serie di attività didattiche in cui utilizzare micro:bit come controller per giochi realizzati con il Blocks Editor, Scratch 3 e per controllare remotamente alcuni robot.
L’idea, molto semplice è stata quella di realizzare un semplice volante stampato in 3D su cui disporre un involucro che ospita BBC micro:bit e il pacco batterie di alimentazione della scheda. Il video in allegato mostra la prima versione del volante micro:bit multiuso. Per chi avesse necessità condivido i file sorgenti per la stampa 3D.
In fase di progetto un controller più evoluto che ospiterà scheda Arduino, pulsanti ed altri dispositivi elettronici.