Dal 17 al 21 luglio scorso ho partecipato ad un’esperienza formativa fuori dal comune che mi ha donato una grande quantità di idee ed approcci didattici che favoriranno la realizzazione di nuovi progetti a partire da settembre prossimo.
La formazione a cui faccio riferimento è quella organizzata annualmente dalla Fondazione Golinelli e Confindustria Emilia Area Centro: MASTERCLASS for STEAM la summer school che per 5 giorni di intense attività creative e coinvolgenti ci ha condotto in un ricco percorso laboratoriale condotto da formatori estremamente preparati in una città affascinate: Bologna.
Quindi una formazione residenziale basata su un approccio pratico, dove in ogni giornata sono state svolte attività esperienziali che sono diventate il punto di partenza per workshop di riflessione e brainstorming.
I temi trattati sono stati tantissimi: dal mindset dinamico per la progettazione delle STEAM, all’analisi dell’errore come valore, analisi dei dati ambientali e Citizen Science, dati partecipazione e linguaggi, IA experience, realtà aumentata e virtuale nelle attività laboratoriali e molto altro.
Attraverso varie strategie di facilitazione, tutte le azioni hanno incentivato una profonda riflessione sugli approcci progettuali, puntando a una progettazione più completa, integrata e olistica valorizzando non solo competenze specifiche, ma anche capacità trasversali e interpersonali, il tutto mirando a rafforzare gli strumenti e le metodologie didattiche, tenendo sempre a mente gli obiettivi STEAM al fine di renderci più consapevoli del nostro ruolo come creatori di esperienze formative.
Sto riguardando gli appunti e i risultati dei laboratori svolti, mi stanno fornendo una grande quantità di idee che sto trasformando in un diario di azioni.
Porto con me il valore del confronto con i colleghi che hanno partecipato all’attività formativa, appassionati, motivati e propensi allo scambio di idee.
Il mio grazie va agli organizzatori, ai formatori ai colleghi.
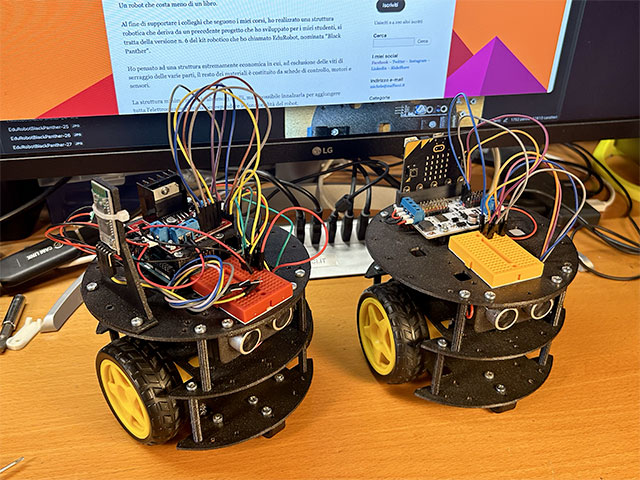
Al fine di supportare i colleghi che seguono i miei corsi, ho realizzato una struttura robotica che deriva da un precedente progetto che ho sviluppato per i miei studenti, si tratta della versione n. 6 del kit robotico che ho chiamato EduRobot, nominata “Black Panther”.
Ho pensato ad una struttura estremamente economica in cui, ad esclusione delle viti di serraggio delle varie parti, il resto dei materiali è costituito da schede di controllo, motori e sensori.
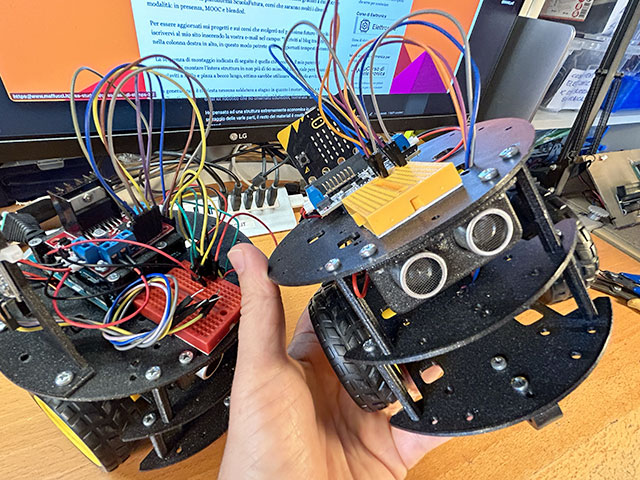
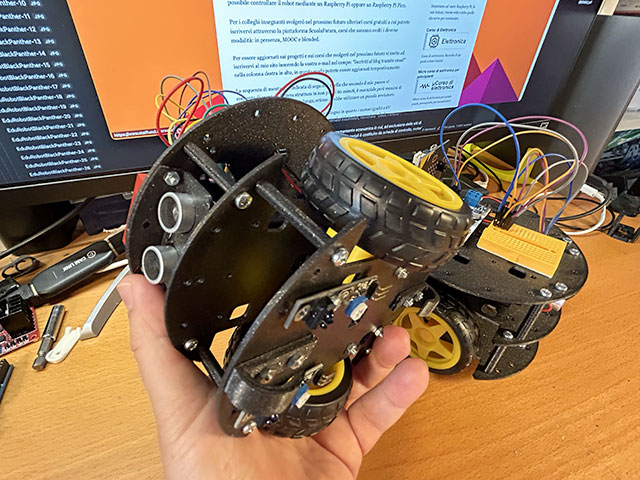
La struttura minima richiede almeno 3 livelli, ma è possibile innalzarla per aggiungere tutta l’elettronica necessaria per espandere le funzionalità del robot.
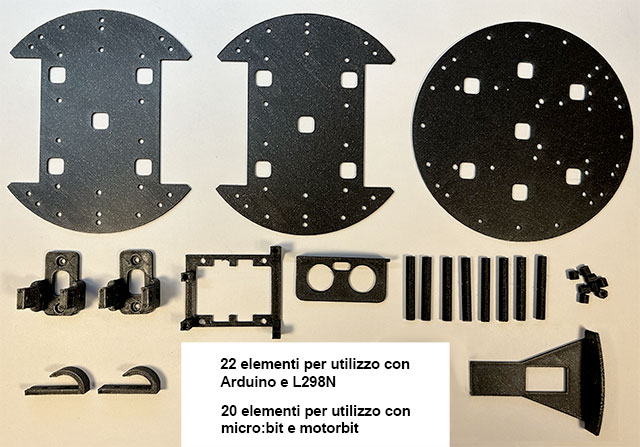
Tutti gli elementi sono stati stampati in 3D ed il materiale scelto è il PLA.
I costi complessivi di stampa, viti di serraggio e dadi, non supera i 10€.
Le funzioni che possono essere programmate sono le medesime dei più blasonati kit robotici in commercio, pertanto se la vostra scuola ha acquistato una stampante 3D, sarà sufficiente una manciata di elettronica a basso costo per realizzerete robot assolutamente inclusivo, sia per il portafoglio delle famiglie degli allievi che di quelle del docente.
Il cilindro di occupazione del robot ha un diametro di 135 mm e i motori sono esattamente centrati rispetto alla base del cilindro.
Per evitare spese aggiuntive al posto delle caster ball ho preferito utilizzare un elemento dotato di superficie curva, ovviamente tale elemento se lo desidera può essere sostituito da una caster ball metallica.
Sul terzo livello del robot sono stati già inseriti fori per fissare i microcontrollori: Arduino UNO R3 e BBC micro:bit e computer Raspberry Pi 3 o 4.
Sempre sul terzo livello nel caso si desidera utilizzare un BBC micro:bit, è possibile fissare una scheda motorbit.
Nel caso il controllo avvenisse con Arduino UNO R3 la scheda di controllo motori è costituita da un L298N che andrà impilato sulla scheda Arduino, secondo quanto indicato nel tutorial che segue.
Nei kit di base sul 3’ livello viene utilizzata una minibreadboard per facilitare la connessione tra i vari dispositivi elettronici.
Per entrambe le versioni il robot è dotato di un sensore ad ultrasuoni HC-SR04 fissato alla struttura. Per la valutazione della distanza dell’ostacolo si è preferito evitare l’utilizzo di un servomotore che facesse ruotare il sensore ad ultrasuoni al fine di ridurre i costi. La rotazione che valuta la distanza dell’ostacolo più vicino verrà svolta ruotando l’intero robot rispetto al suo baricentro.
Il robot è dotato di due sensori ad infrarossi da impiegare per la realizzazione di un robot segui linea.
Nella versione con scheda Arduino UNO R3 sarà possibile effettuare un controllo mediante scheda Bluetooth HC-05, il cui supporto potrà essere fissato sul terzo piano del robot.
Di seguito la lista dei materiali e le relative fotografie che ne dettagliano la costruzione delle parti meccaniche e delle schede, non viene dettagliata la connessione elettrica tra le parti e la programmazione, per ora riservato ai colleghi che frequentano o frequenteranno i miei corsi, ma molto probabilmente nel prossimo futuro, con un po’ di calma lavorativa estenderò a tutti la parte di spiegazione elettronica e programmazione.
Sto sviluppando corsi in cui mostro come, usando la medesima struttura robotica, sarà possibile controllare il robot mediante un Raspberry Pi oppure un Raspberry Pi Pico.
Per i colleghi insegnanti svolgerò nel prossimo futuro ulteriori corsi gratuiti a cui potrete iscrivervi attraverso la piattaforma ScuolaFutura, corsi che saranno svolti i diverse modalità: in presenza, MOOC e blended.
Per essere aggiornati sui progetti e sui corsi che svolgerò nel prossimo futuro vi invito ad iscrivervi al mio sito inserendo la vostra e-mail nel campo: “Iscriviti al blog tramite email” nella colonna destra in alto, in questo modo potrete essere aggiornati tempestivamente.
La sequenza di montaggio indicata di seguito è quella che secondo il mio parere vi consente di montare l’intera struttura in non più di 60 minuti, è essenziale però munirsi di cacciaviti a stella e pinza a becco lungo, ottimo sarebbe utilizzare un piccolo avvitatore.
In generale non è richiesta nessuna saldatura a stagno in quanto i motori (gialli) a 6V utilizzati possono essere acquistati anche con cavi già saldati, attenzione però che la connessione tra motore e cavi elettrici potrebbe essere delicata, pertanto si consiglia di serrare i cavi mediante una fascetta stringicavi, come dettagliato di seguito.
Se è necessario prolungare la lunghezza dei cavi è possibile adottare diversi metodi, quello che preferisco è l’utilizzo di connettori wago che possono essere acquistati con diverso numero di fori, nel caso di questo kit robot sono sufficienti wago da 3 fori.
Ovviamente, nel caso di rotture o disconnessione dei cavi dai poli del robot bisognerà per forza ricorrere alla saldatura a stagno.
La fotografia che segue mostra tutti gli elementi da stampare in 3D per le due versioni di robot.
Di seguito elenco materiali e sequenza di montaggio.
Durante il mio ultimo corso sulla realizzazione di mini serre indoor, ho fornito ai corsisti le competenze di base per usare una serie di sensori controllati dal micro:bit. Alcuni colleghi possedevano kit generici di componentistica elettronica tra cui sensori non disposti PCB board, pertanto per alcuni non erano presenti quei componenti che permettevano l’interfacciamento al microcontrollore. È il caso ad esempio del DHT22 sensore di temperatura è umidità relativa che ha una modalità di utilizzo molto simile al più noto ed economico DHT11.
Le caratteristiche tecniche dei due sensori sono indicate di seguito:
DHT11
DHT22
Intervallo di temperatura
0 to 50 ºC +/-2 ºC
-40 to 80 ºC +/-0.5ºC
Intervallo di umidità
20 to 90% +/-5%
0 to 100% +/-2%
Risoluzione
Umidità: 1% Temperatura: 1ºC
Umidità: 0.1% Temperatura: 0.1ºC
Tensione di funzionamento
3 – 5.5 V DC
3 – 6 V DC
Corrente di funzionamento
0.5 – 2.5 mA
1 – 1.5 mA
Periodo di campionamento
1 secondo
2 secondo
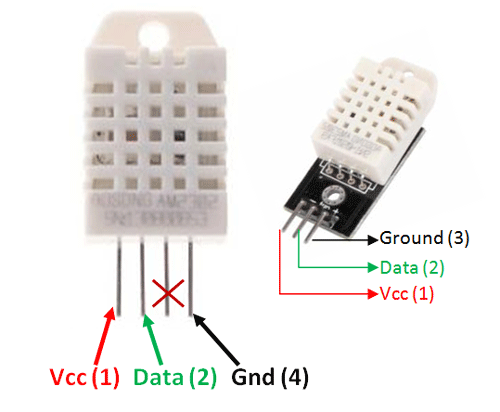
Il sensore DHT22 può essere acquistato nelle due modalità: su PCB board oppure in modalità solo componente come indicato nell’immagine che segue:
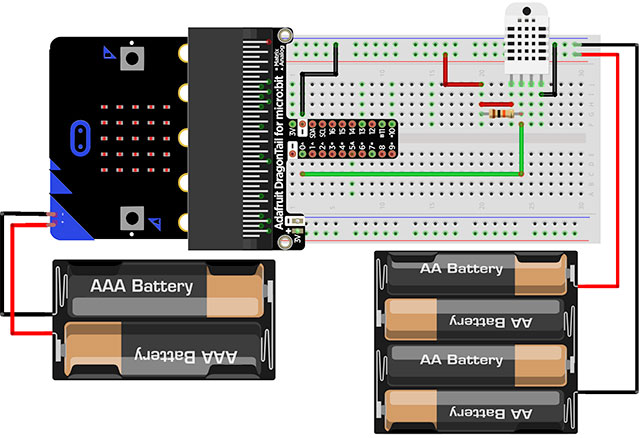
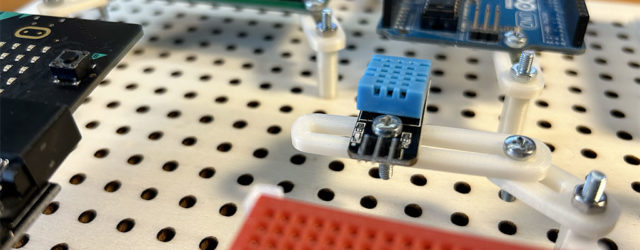
Il DHT22 per poter funzionare necessità di un resistore di pull-up che nella versione PCB è già presente. Nel caso si dispone del solo sensore è necessario aggiungere un resistore tra i 5k ohm e i 10k ohm connesso come nell’immagine che segue:
La modalità di utilizzo del sensore con il micro:bit è estremamente semplice e richiede solamente l’installazione di un’estensione che potrete cercare facendo clic su “Extensions” ed inserendo nel campo di ricerca dht22. L’estensione sarà DHT11_DHT22 in grado di gestire sia il DHT11 che il DHT22.
Seguire il link per consultare la pagina di riferimento dell’estensione utilizzata.
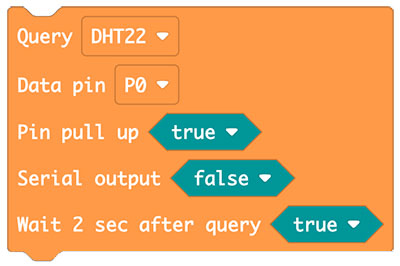
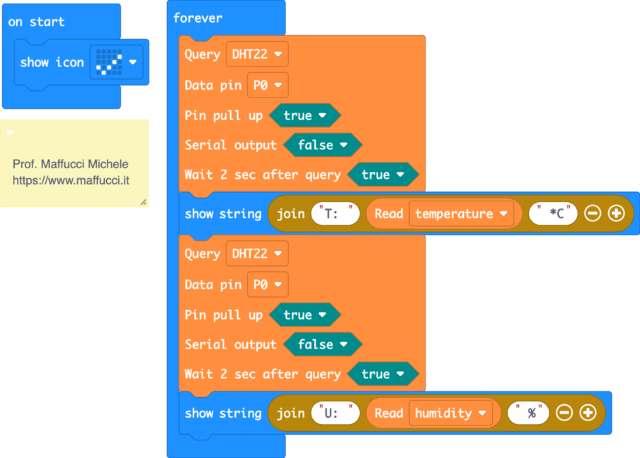
Come potrete leggere l’istruzione di configurazione riportata nell’immagine che segue è costituita da una serie di campi:
Query: permette la selezione del tipo di sensore, DHT11 o DHT22
Data pin: è il pin del micro:bit a cui dovremo connettere il pin data del DHT22
Pin pull-up: indica se presente il resistore di pull-up nel nostro caso dovrà essere impostato a true. Nel caso fosse impostato a false verrà utilizzato il resistore di pull-up interno del micro:bit che è di circa 13 K ohm.
Serial output: stabilisce se si vuole un output sulla serial monitor, false non mostra i dati, true li mostra
Wait 2 sec after query: se impostato su true consente di fissare l’intervallo tra due interrogazioni al sensore a 2 secondi, lasciare questa impostazione. È importante non ridurre questo intervallo altrimenti il sensore non riuscirà a fornirci la misura.
Durante la comunicazione tra sensore e micro:bit viene effettuato un controllo di eventuali errori di comunicazione, se ciò accade leggerete in output il codice di errore -999 se l’errore persiste per più secondo molto probabilmente il problema è di carattere elettivo, nella maggior parte dei casi una connessione mancante o errata connessione elettrica tra i dispositivi.
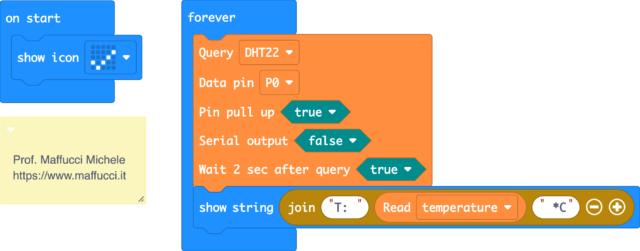
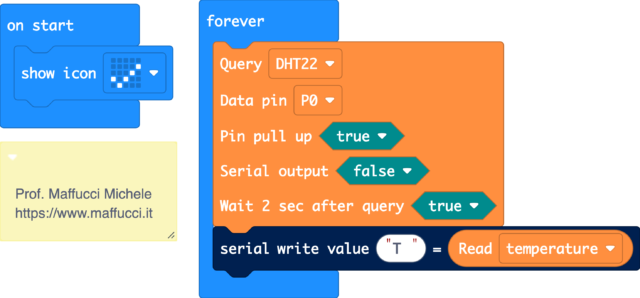
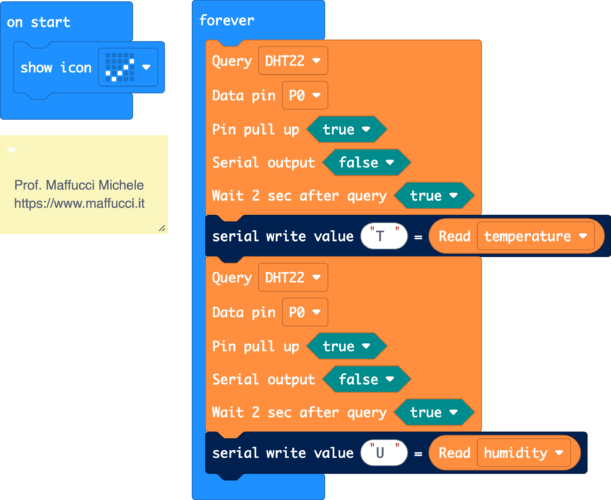
Aggiungo alcuni programmi che mostrano il funzionamento del DHT22.
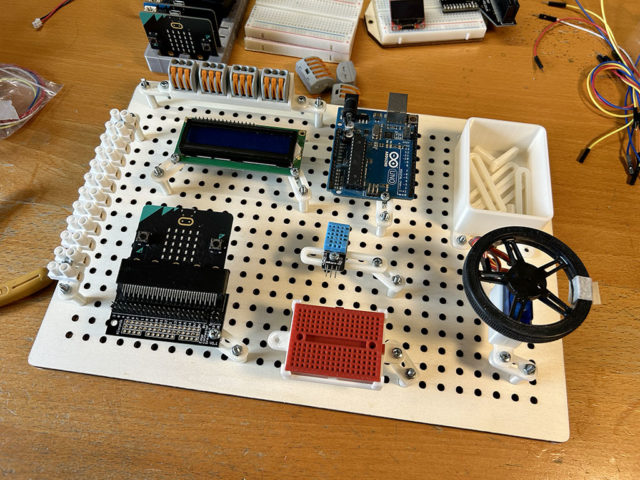
L’attività di formazione nel settore delle tecnologie didattiche mi coinvolge parecchio ed ogni volta la parte più complessa del lavoro risiede nell’organizzare la regia degli oggetti che gestisco e mostro online. Realizzare robot, serre, stazioni meteorologiche o comunque automazioni elettroniche richiede ordine, e mantenere una disposizione corretta degli apparati durante una lezione in diretta online richiede, almeno da parte mia, uno sforzo notevole.
Durante la lezione vi sono diverse fasi in cui operando con microcontrollori, micro:bit o Arduino, è necessario sviluppare dei semielaborati che devono mostrare ad esempio l’evoluzione di una stazione meteorologica, con l’aggiunta via via di sensori.
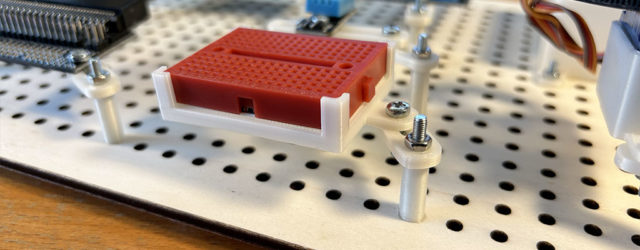
Per ottimizzare il processo di costruzione ho deciso di sperimentare qualcosa che in realtà è stato realizzato da altri, la Prototyping Base Plate di Boris Humberg, io ne ho fatto una versione più grande cambiando alcune misure in modo da adattarla alle mie necessità, con molta fantasia ho voluto chiamarla Electronic Prototyping Base Plate, per poter scaricare i sorgenti per la stampa 3D e il taglio laser seguire il link su Thingiverse.
Si tratta di una basetta di compensato da 4mm di spessore con le dimensioni di un foglio A4 forata. I fori della basetta sono da 3mm distanziati 10 mm l’uno dall’altro. Gli elementi di supporto dei circuiti a forma di L hanno dimensioni tali da poter alloggiare viti M3 e potete utilizzarli in tutti e due i sensi.
Aggiungo tra gli elementi supporti per connettori Wago, contenitore porta oggetti, supporto per mini breadboard e servomotore. Ho aggiunto dei piedini in modo da distanziare le viti dalla base di appoggio.
La basetta è stata realizzata con una macchina a taglio laser, però potreste utilizzare qualsiasi pezzo di compensato e con un piccolo trapano effettuate i fori là dove vi servono, quindi è sufficiente stampare in 3D tutti gli elementi ed utilizzare la base di appoggio.
Spero che questo progetto possa servire anche ad altri.
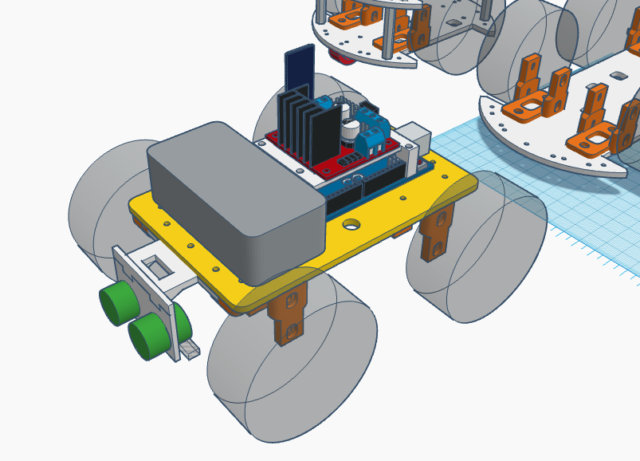
Durante le attività di robotica sia con allievi che con docenti la fase di costruzione meccanica può richiedere parecchio tempo, pertanto ho pensato di realizzare qualcosa di molto semplice su cui disporre l’elettronica di controllo che si preferisce. Per rendere più interessante l’attività di programmazione ho realizzato un robot 4WD da utilizzare per costruire diverse tipologie di robot: controllati remotamente via Bluetooth, WiFi, autonomi, inseguitore di persone, inseguitore di luce, rilevatore di gas, line follower, controllato dalla voce umana.
5 minuti di Yoga creativo per recuperare elementi da altri progetti in questo modo è nato EduRobot 4WD, su questa base solamente i fori per le forcelle che sostengono i motori e fori per passaggio cavi, tutto il resto sarà a carico del Maker che farà i fori opportuni con un piccolo trapano o cacciavite in modo da disporre l’elettronica che desidera, costo di stampa dell’intera struttura 1€.
Per chi seguirà il mio prossimo corso di robotica organizzato da Tecnica della Scuola: “Creare un kit robotico educativo a basso costo – 4′ edizione”, renderò disponibile il codice di controllo e nei prossimi giorni per tutti, sul mio sito personale, i file sorgenti per realizzare la struttura di supporto.