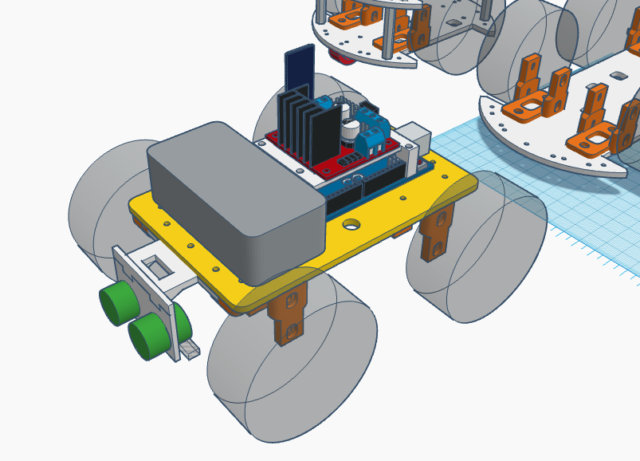
Durante le attività di robotica sia con allievi che con docenti la fase di costruzione meccanica può richiedere parecchio tempo, pertanto ho pensato di realizzare qualcosa di molto semplice su cui disporre l’elettronica di controllo che si preferisce. Per rendere più interessante l’attività di programmazione ho realizzato un robot 4WD da utilizzare per costruire diverse tipologie di robot: controllati remotamente via Bluetooth, WiFi, autonomi, inseguitore di persone, inseguitore di luce, rilevatore di gas, line follower, controllato dalla voce umana.
5 minuti di Yoga creativo per recuperare elementi da altri progetti in questo modo è nato EduRobot 4WD, su questa base solamente i fori per le forcelle che sostengono i motori e fori per passaggio cavi, tutto il resto sarà a carico del Maker che farà i fori opportuni con un piccolo trapano o cacciavite in modo da disporre l’elettronica che desidera, costo di stampa dell’intera struttura 1€.
Per chi seguirà il mio prossimo corso di robotica organizzato da Tecnica della Scuola: “Creare un kit robotico educativo a basso costo – 4′ edizione”, renderò disponibile il codice di controllo e nei prossimi giorni per tutti, sul mio sito personale, i file sorgenti per realizzare la struttura di supporto.
L’idea di questa nuova piattaforma basata su inserti Lego Duplo compatibili nasce dall’esperienza maturata da una serie di progettualità passate, la prima si riferisce alla creazione di un LegoDuino , un robot didattico basato su motori e struttura Lego Mindstorms NXT in cui avevo sostituito l’unità centrale Lego con un box costituito da una scheda Arduino e schede motori. La seconda esperienza, DotBot:bit Lego version un piccolo robot controllato da micro:bit e scheda Servo:Lite di Kitronik per gestire i servomotori a rotazione continua e nello stesso modo WalkerBot:bit Lego version, un robot insetto a 4 zampe. Seguendo i link dei robot sopra citati trovate tutti i dettagli anche per la realizzazione delle strutture.
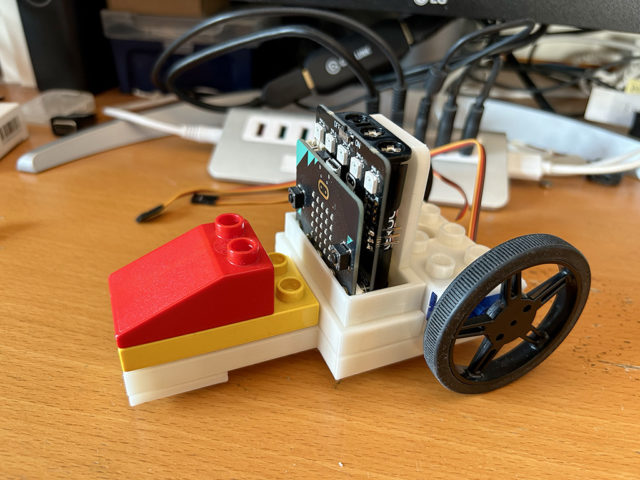
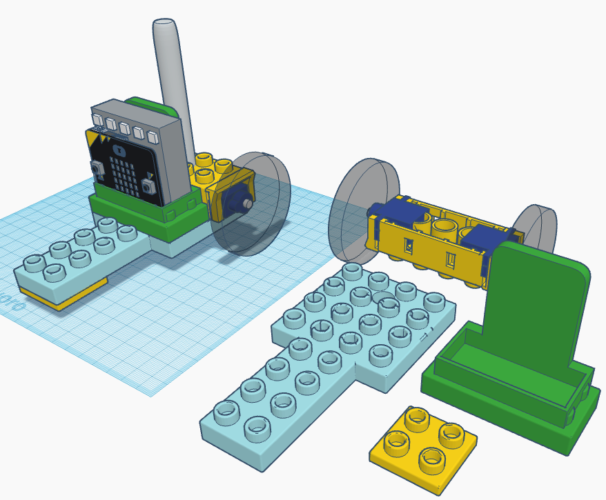
Rendere compatibili i robot con innessti bricks e Technics espande senza dubbio le possibilità creative degli studenti. Aggiungere la possibilità di utilizzare innesti lego Duplo compatibili nasce da alcune osservazioni, la prima è l’esperienza maturata da Claudio Gasparini che per primo ha sviluppato l’idea di un robot basato su Lego Duplo, io ho ripreso l’idea del progetto iniziale e ne ho realizzato una versione personalizzata e replicabile all’infinito mediante stampa 3D.
Ho sperimentato EduRobot Block in attività laboratoriali sviluppate dai colleghi della primaria, su cui ho avuto diversi feedback e richieste di espansione pertanto ho pensato che potesse essere interessante offrire alle scuole gli oggetti per la realizzazione di piccoli robot realizzati stampanto in 3D blocchi Lego Duplo compatibili in cui non sono presenti viti, la cui costruzione avviene innestando ed incastrando oggetti: servomotori a rotazione continua, schede micro:bit, pennarelli per far disegnare al robot.
Su questo robot ho avuto riscontro positivo, al punto che i colleghi desiderano inserirlo nelle dotazioni delle prossime aule innovative dotate di stampanti 3D, pertanto ho deciso di rendere disponibile i sorgenti grafici per la realizzare questa prima versione, in questo modo sarà possibile aggiungere ai più blasonati kit robotici commerciali qualcosa di didatticamente economico, funzionale ed espandibile in funzione della fantasia dei bambini. Sono in fase di progetto di ulteriori ausili didattici per altre tipologie di attività laboratoriali, ne darò notizia più avanti.
Se siete interessati a realizzare la struttura del robot seguite il link su Thingiverse da cui potrete prelevare i file per la stampa 3D.
Questo ed altre strutture robotiche realizzabili a basso costo saranno mostrate e programmate durante i mie prossimi corsi, il primo in partenza tra breve lunedì prossimo a cui potete ancora iscrivervi:
Tecnica della Scuola: Creare un kit robotico educativo a basso costo – 4′ edizione un corso full immersion per colleghi anche non di materie tecniche. Mi concentrerò sull’aspetto progettuale. Per i partecipanti fornirò schede di lavoro e anteprime dei prossimi lavori in progetto.
Per maggiori informazioni sul programma e modalità di iscrizione seguire il LINK.
Con molti dei colleghi che hanno partecipato ai mie corsi ho intrapreso un’attività di ricerca e azione, anche a distanza con cui si sono attivate relazioni di scambio didattico e collaborazine su progetti didattici molto interessanti, ho chiamato questa esperienza TechEd Lab, una sorta di FabLab che si sviluppa sia online che in presenza. Da aprile prossimo il TechEd Lab inizierà le sue attività in presenza, ma per questo fornirò dettagli più avanti.
Ho perfezionato in questo inizio d’anno scolastico i percorsi di formazione per i laboratori green che condurrò nei prossimi mesi, oltre alle lezioni in sincrono, aggiungerò video tutorial che mostrano le fasi di costruzione di una mini serra didattica e dettagli di programmazione. Queste attività inoltre andranno a supporto del repository di progetti PCTO che sto realizzando presso l’LTO di Moncalieri.
Recentemente mi sono giunte richiesta per la realizzazione di mini serre da alcuni colleghi amici che operano nella scuola Primaria e Secondaria di primo grado, la necessità è quella di allestire le loro aule innovative con oggetti economici e di facile gestione e soprattutto inclusivi.
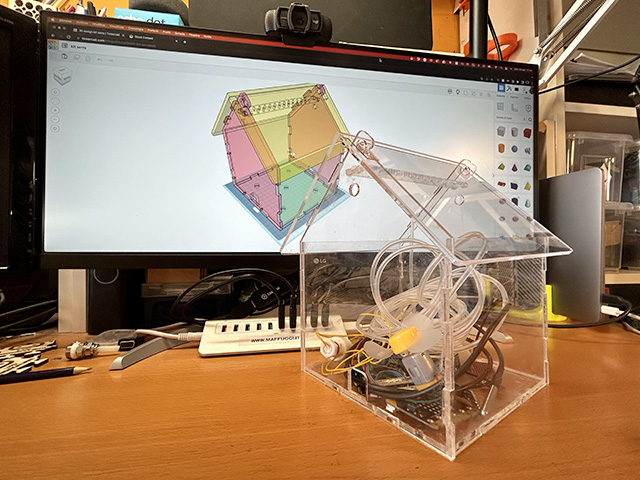
E’ nata quindi la “mini Greenhouse crystal”, una mini serre in plexiglass in cui inserire l’elettronica di controllo per realizzare attività STEAM.
La mini serra sarà inserita all’interno di una struttura modulare in cui si potranno aggiungere altri strumenti: cisterne d’acqua, pannelli solari, ecc… .
Se desiderate realizzare una mini serra, così come hanno fatto altre scuole, contattate il Laboratorio Territoriale di Moncalieri dell’ITIS Pininfarina.
In questa settimana sto seguendo alcuni allievi di classe 5′ in attività di PCTO presso il Lab. Territoriale, hanno il compito di ottimizzare alcuni processi di lavoro in laboratorio, però mercoledì scorso un’urgenza didattica ha deviato la loro attività principale, si sono cimentati nella progettazione e realizzazione di un mini hackaton di rimotivazione nei confronti di una classe 2′ problematica soprattutto dal punto di vista disciplinare.
L’oggetto del contest è stato lo svolgimento di un’attività laboratoriale usando una metodologia ludica centrata su un piccolo argomento di elettrotecnica. Tutto il modulo è stato progettato in modalitò lean organization. I ragazzi in PCTO hanno pensato ad un kit che abbiamo chiamato: “smart hackaton rimotivazionale” un oggetto didattico adattabile all’argomento desiderato, di breve durata (55 min), tutto documentato e reso procedura. Il progetto ha preso in considerazione diverse componenti tra cui:
dinamica di gioco
tempi di progetto ed esecuzione attività: dalla spiegazione, al tipo di rapporto tra tutor ed allievi, modalità per effettuare la premiazione, tecniche di coinvolgimento e modalità per innescare empatia con gli allievi e molto altro
progettazione degli elementi fisici a supporto dell’attività, ad esempio: le LTO coin da spendere per avere vantaggi nell’attività (uso degli strumenti di misura), schede di lavoro, premio finale (coppa)
Quindi tempi precisi, in 55 miunti: 3 minuti di presentazione dell’attività da parte del docente (io), 10 minuti di richiamo teorico da parte degli allievi tutor (alllievi in PCTO), 5 minuti per la spiegazione del gioco 30 di gioco e 7 minuti per la premazione e mio sermone finale.
Nelle prossime settimane espliciterò tutto il processo in un documento che in via sperimentale sarà sottoposto ai mie colleghi neoassunti che seguiranno l’attività di formazione che condurrò e poi diventerà parte integrante del processo di attività laboratoriale che svolgo da sempre.
Presto online ulteriori dettagli.
P.S.
La cosa più bella?
Al termine dell’attività, nei 7 minuti che mi sono stati concessi dai miei studenti di 5′ ho aggiunto:
ragazzi spero di ritrovarvi in laboratorio insieme per imparare divertendoci e voglio darvi ancora due indicazioni:
sistemiamo insieme il laboratorio, lasciamolo in ordine e pulito
baci ed abbracci a tutti
… alcuni allievi hanno preteso l’abbraccio 🙂
Un grazie a: Francesco, Andrea, Gianluca, Alessandro
Recentemente mi è stato chiesto da una collega che lavora presso una scuola primaria, di supportarla nello studio sull’uso di micro:bit ed aiutarla nella realizzazione dell’allestimento di un’automazione da inserire in una recita. L’automazione realizzata con micro:bit è la parte finale del percorso di Coding che farà svolgere ai suoi studenti. Il sistema che dovrà realizzare consiste in una scultura parlante che riproduce brani specifici al verificarsi di eventi esterni: pressione di pulsanti, rilevazione di un ostacolo, in generale il trigger può essere qualsiasi evento rilevato da un sensore.
Per la realizzazione di questo progetto ho utilizzato Blocks per la programmazione a cui sono state aggiunte le istruzioni dell’estensione DFPlayer Mini, un mini lettore MP3 realizzato da DFRobots che può essere connesso a diversi microcontrollori tra cui anche micro:bit.
Attualmente sto utilizzando questo dispositivo per estendere le funzionalità della EduRobot Greenhouse mini, la mini serra stampata in 3D su cui ho realizzato un nuovo percorso di formazione per la scuola e di cui a breve rilascerò in modalità gratuita i sorgenti.
Alla serra ho aggiunto allarmi vocali preregistrati che forniscono informazioni audio sullo stato della serra che utilizzano DFPlayer Mini.
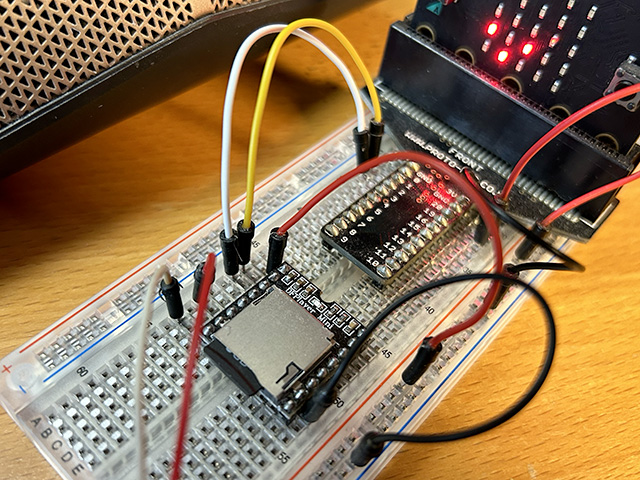
Questa tutorial è una guida passo passo, non entrerò nel dettaglio dell’elettronica, indicherò solamente come connettere il modulo MP3 e micro:bit e come programmare l’automazione.
DFPlayer Mini può essere acquistato su diversi store a costi contenuti. E’ indispensabile munirsi di un micro SD su cui andremo a memorizzare i brani MP3e che verrà poi inserita nel player.
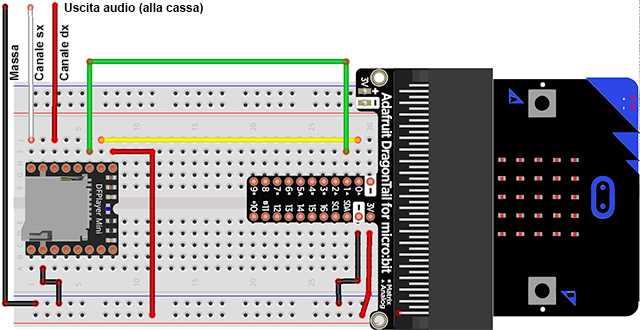
Per la riproduzione dei suoni ho utilizzato una cassa amplificata conessa mediante jack audio stereo da 3,5 mm alla scheda DFPlayer Mini.
I nomi dei file MP3 dovranno essere dei numeri, nel mio caso: 001.mp3, 002.mp3, 003.mp3.
E’ possibile, se lo si desidera, nel caso di un numero elevato di brani, organizzare i file MP3 in cartelle e richiamare in modo opportuno dal codice.
La scheda micro SD, che non dovrà essere più grande di 32GB, (nel mio caso 8GB) e dovrà essere formattata in formato FAT16 o FAT32 (nel mio caso FAT32), ma tutte le specifiche le trovate sul wiki sopra indicato.
Ricordo per gli utenti Mac, che sulla scheda dovranno essere cancellati i file il cui nome inizia con “.”.
Il collegamento tra DFPlayer Mini e cassa può essere realizzato in diversi modi:
Modo 1
Munirsi di un cavo maschio-maschio audio stereo mini jack da 3,5 mm, tagliare un capo ed utilizzare i fili separatamente (rosso: canale destro, bianco: canale sinistro, nero: massa), connettere questi alla scheda DFPlayer Mini saldando dei jumper maschio-maschio, oppure usando morsetti wago.
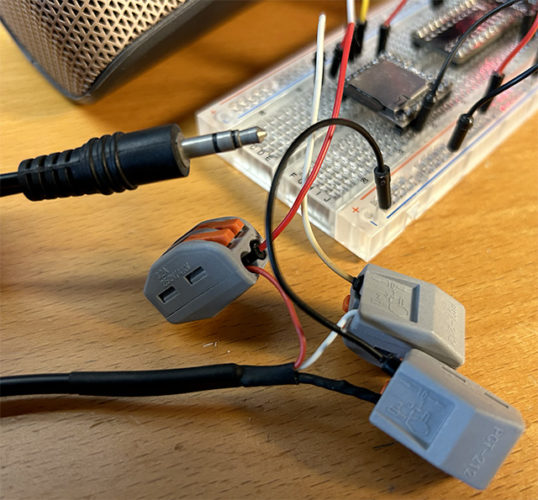
Modo 2
Munirsi di un jack maschio stereo da 3,5 mm come quello indicato nell’immagini dotato di ingressi a cui è possibile connettere i cavi audio serrandoli con i morsetti a vite. Il jack va connesso alla cassa (o all’amplificatore) ed i tre fili alla scheda DFPlayer Mini
In entrambi i casi ricordarsi di:
connettere il cavo di massa alla massa sia del DFPlayer che del micro:bit;
che il cavo audio non sia troppo lungo;
sarebbe ottimo se si riuscisse ad inserire l’intero circuito all’interno di una scatola schermata.
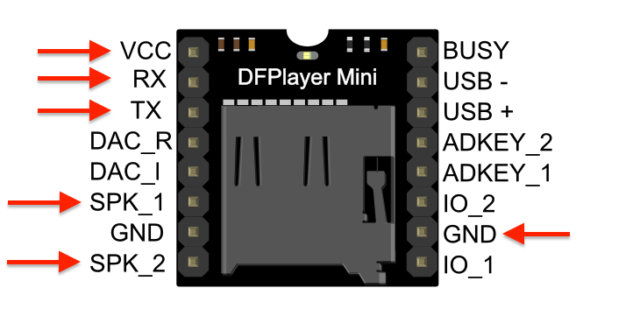
Il DFPlayer può essere alimentato, come indicato dalle specifiche, con tensioni: dai 3,2V DC ai 5,5V DC. Ricordo che se utilizzate alimentazini diverse per i vostri circuiti, connettere sempre tutte le masse insieme.
Nell’immagine che segue metto in evidenza con frecce i pin utilizzati nel schema di collegamento.



 In questa settimana sto seguendo alcuni allievi di classe 5′ in attività di PCTO presso il Lab. Territoriale, hanno il compito di ottimizzare alcuni processi di lavoro in laboratorio, però mercoledì scorso un’urgenza didattica ha deviato la loro attività principale, si sono cimentati nella progettazione e realizzazione di un mini hackaton di rimotivazione nei confronti di una classe 2′ problematica soprattutto dal punto di vista disciplinare.
In questa settimana sto seguendo alcuni allievi di classe 5′ in attività di PCTO presso il Lab. Territoriale, hanno il compito di ottimizzare alcuni processi di lavoro in laboratorio, però mercoledì scorso un’urgenza didattica ha deviato la loro attività principale, si sono cimentati nella progettazione e realizzazione di un mini hackaton di rimotivazione nei confronti di una classe 2′ problematica soprattutto dal punto di vista disciplinare.