La misurazione di una tensione con Arduino è un esercizio standard utilizzato per spiegare come funziona il convertitore Analogico Digitale sulla scheda. Nell’esempio che segue verrà mostrato come visualizzare sulla Serial Monitor la tensione di una batterie da 1,5V ma in generale di una tensione non superiore ai 5V, seguono poi una serie di esercizi per i miei studenti.
Nella prossima lezione mostreremo come misurare una tensione superiore ai 5V.
ATTENZIONE
E’ essenziale ricordare che non bisogna in alcun modo inserire tensioni superiori a 5V sui pin di Arduino, in quanto potreste distruggere irrimediabilmente la scheda.
Per la rilevazione di una tensione elettrica su un pin analogico viene utilizzata la funzione analogRead, che come più volte indicato su questo sito, è in grado di convertire una tensione tra 0V e 5V continui in un valore numerico intero con risoluzione di 10 bit tra 0 e 1023, operazione svolta dal convertitore A/D.
Ricordo che l’analogRead(pin) legge il valore di tensione (compreso tra 0 e 5V) applicato sul piedino analogico ‘pin’ con una risoluzione di 10 bit e la converte in un valore numerico compreso tra 0 e 1023, corrispondente quindi ad un intervallo di 1024 valori, pertanto il valore unitario corrisponde a:
Vu = 5V/1023 = 4,89 mV
Per conoscere il valore di tensione rilevato sarà sufficiente moltiplicare la tensione unitaria Vu per il valore restituito dalla funzione analogRead(pin), quello che chiamiamo valore quantizzato Vq compreso tra 0 e 1024, il valore misurato Vm sarà:
Vm = Vu x Vq
e sapendo che Vu corrisponde a 4,89 mV possiamo scrivere:
Vm = 4,89 x Vq
Nota per i miei allievi: riprenderemo questo semplice calcolo qundo utilizzeremo ad esempio i sensori di temperatura.
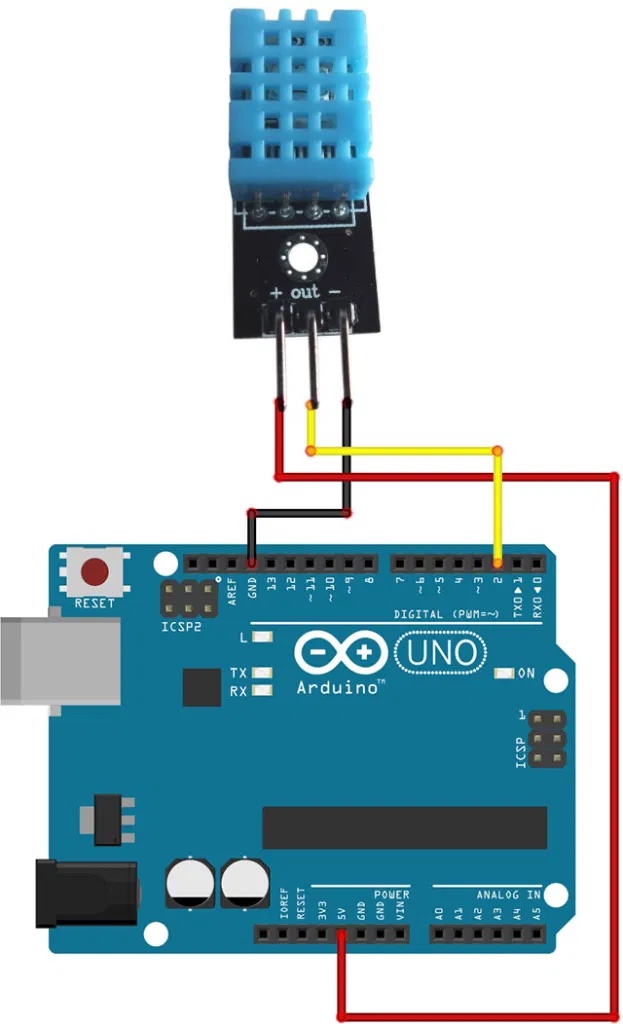
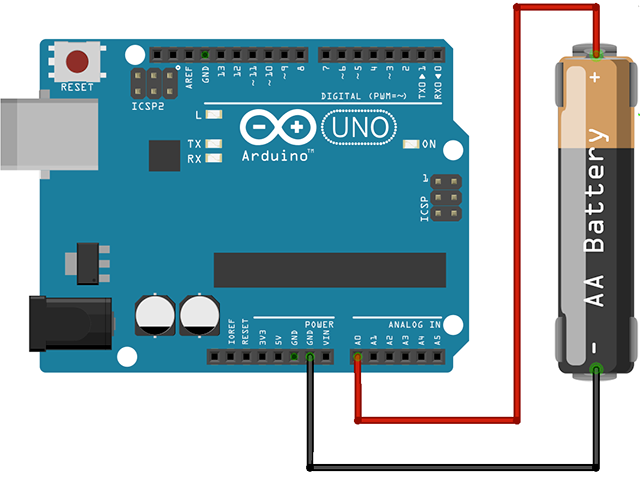
Il semplice schema di collegamento è riportato nell’immagine che segue:
Per stampare sulla Serial Monitor la tensione ai capi della batteria, useremo valori di tipo float (in virgola mobile), che come indicato nel mio post: “Arduino: tipi di dati – ripasso” possiamo esprime valori compresi tra –3.4028235E+38 e 3.4028235E+38.
La stampa di numeri in virgola mobile sula Serial Monitor verrà rappresentata con numeri che hanno al massimo con due cifre decimali, riprenderemo questo aspetto nel secondo esempio di questa lezione.
// Prof. Maffucci Michele
// Esempio 01: Misura di tensioni continue non superiori a 5V
// utilizzando variabili di tipo float
// Data: 01.10.2021
// tensione di riferimento predefinita sulla scheda
const float tensioneDiRiferimento = 5.0;
// batteria connessa al pin analogico 0
const byte pinBatteria = A0;
void setup() {
// inizializzazione della porta seriale
Serial.begin(9600);
}
void loop() {
// legge il valore della batteria e lo trasforma
// in un valore numerico tra 0 e 1023
int valoreLetto = analogRead(pinBatteria);
// calcolo della proporzione
// volt:tensioneDiRiferimento = valoreLetto:1023.0
// da cui si ricava la formula che segue
float volt = (valoreLetto/1023.0) * tensioneDiRiferimento;
// stampa sulla Serial Monitor la tensione misurata
Serial.println(volt);
}
Per evitare spreco di memoria dovuto ai calcoli che utilizzano i tipi di dati float che occupano maggiore memoria, è possibile utilizzare al posto del tipo float il tipo long, ovvero un int lungo rappresentato da 4 byte in grado di rappresentare numeri interi tra –2147483648 a 2147483647.
Vediamo come modificare lo sketch precedente per rilevare tensioni espresse in millivolt in cui però si utilizzano variabili intere di tipo long:
// Prof. Maffucci Michele
// Esempio 02: Misura di tensioni continue non superiori a 5V
// utilizzando variabili di tipo float
// Data: 01.10.2021
// batteria connessa al pin analogico 0
const byte pinBatteria = A0;
void setup() {
// inizializzazione della porta seriale
Serial.begin(9600);
}
void loop() {
// legge il valore della batteria e lo trasforma
// in un valore numerico tra 0 e 1023
// valoreLetto è di tipo long
long valoreLetto = analogRead(pinBatteria);
// stampa sulla Serial Monitor la tensione misurata
// in millivolt
Serial.println((valoreLetto*(500000/1023L))/100);
}
Quindi per evitare di effettuare calcoli con numeri di tipo float (in virgola mobile) senza perdere precisione, il trucco consiste nell’operare sui valori in millivolt invece che sui valori in volt. Ricordo che 1 volt corrisponde a 1000 millivolt.
Come detto all’inizio di questa lezione sappiamo che un valore numerico di 1023 restituito dall’analogRead, corrisponde al valore massimo di 5000 millivolt, allora ogni unità rappresenta 5000/1023 millivolt, che corrisponde a 4,89 millivolt. Come detto nell’esempio precedente, la stampa su Serial Monitor di un numero in virgola mobile mostrerà al massimo due decimali, pertanto l’eliminazione dei decimali nel secondo esempio possiamo farlo moltiplicando per 100, nel codice: 5000×100=500000, questo valore verrà poi moltiplicato per il rapporto tra il valore letto e 1023 ed il tutto ancora diviso per 100, così facendo otterremo il valore in millivolt. Questo calcolo permette di far effettuare al compilatore solamente calcoli tra interi e non tra float, rendendo quindi la computazione più veloce e riducendo la quantità di memoria utilizzata.
Si noti che al fondo del numero 1023 è stata aggiuta una L, cioè 1023L, che indicare al compilatore che il numero rappresentato è di tipo long (4 byte).
Esercizi per i miei studenti
Esercizio 1
Utilizzare un Trimmer per regolare la tensione in ingresso ad A0 tra 0 e 5V, in questo caso si prenda la tensione di 5V dal pin di Arduino.
Esercizio 2
Nel primo sketch proposto utilizzare la funzione map per convertire il valore restituito dall’ analogRead in un valore di tensione. In questo caso nascono dei problemi sulla precisione della misura, sapresti indicarmi quali?
Esercizio 3
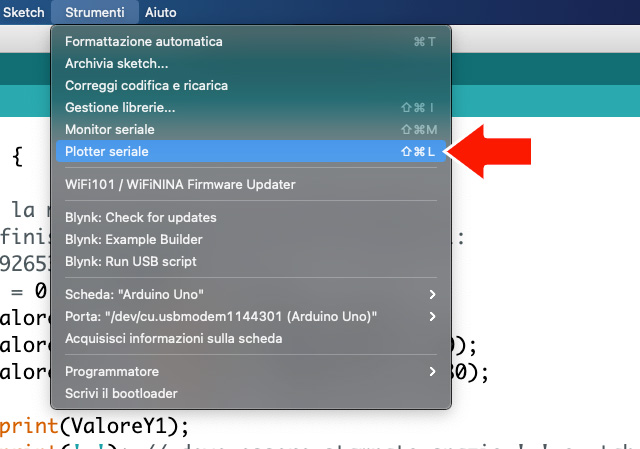
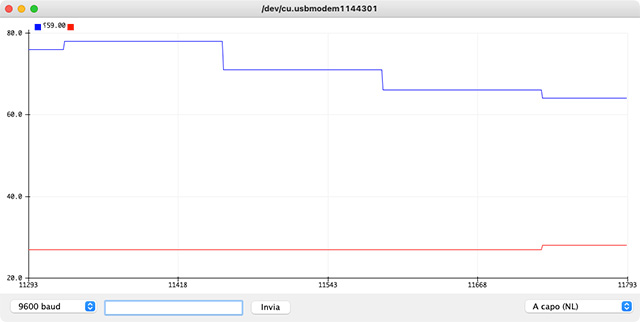
Visualizzare il valore di tensione regolato dal Trimmer sul Plotter Seriale.
Esercizio 4
Utilizzando uno qualsiasi dei due sketch indicati sopra e visualizzare la tensione misurate sul un display 16×2
Esercizio 5
Aggiungere all’esercizio precedente l’indicazione di carica data da un grafico costituito da 5 quadrati che ne indicano il livello di carica, non appena il livello di carica raggiunge 1 volt il quadrettino inizia a lampeggiare.
Buon Making a tutti 🙂