Creato in Area Studenti la sezione: Guida introduttiva alluso di Eagle in cui sono state raccolte le 4 lezioni su Eagle.
In futuro in questo paragrafo verranno raccolte altre risorse.

Creato in Area Studenti la sezione: Guida introduttiva alluso di Eagle in cui sono state raccolte le 4 lezioni su Eagle.
In futuro in questo paragrafo verranno raccolte altre risorse.
Il primo amore “robotico” non si scorda mai 🙂
Ero il lontano 2009 quando io ed alcuni colleghi organizzamo la prima RoboCup Junior a Torino Lingotto. I risultati didattici che vengono da quel periodo hanno mutato radicalmente, almeno per me, il modo di pensare e progettare la diattica, una bella esperienza per me e per i molti colleghi, sia della primaria che della secondaria, che hanno poi avuto negli anni successivi il coraggio e la forza di proseguire le attività di robotica educativa. Uno dei risultati più belli è stato l’utilizzo della laboratorietà ad ogni livello educativo ed in molte discipline. Come spesso ribadisco ai miei studenti: “fare, costruire e sperimentare per comprendere a pieno ed in modo divertente ciò che si studia” e la robotica in questo ha dato un notevole aiuto.
Il tutto ebbe inizio con i Lego Mindstorms NXT, con questo kit si incomincio a pensare anche ad un modo diverso di insegnare l’informatica, realizzammo robot ma anche strumenti scientifici.
Nuove possibilità sono ora offerte dalla versione Lego Mindstorms EV3 la cui vendita in Italia parte in questi giorni.

La nuova versione offre la possibilità di pilotare le proprie realizzaioni robotiche via smartphone e tablet (iOS e Android). Questo livello di interattivita è reso possibile dall’EV3 Intelligent Brick, un mattone grigio al cui interno vi è una microcontrollore basato su chip ARM9 a 64MB di RAM con slot di espansione SD. La comunicazione con il mondo esterno avviene con porta USB 2.0 e connessione Bluetooth. Il tutto è governato da un sistema operativo LINUX.
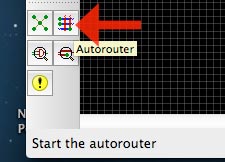
Utilizzo dell’autorouter
Trovate la funzione autorouter nella pulsantiera di sinistra:
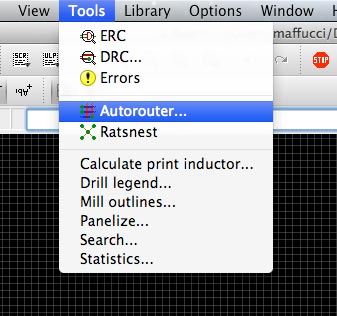
Oppure dal menù: Tools -> Autorouter…
Apparirà la finestra seguente:
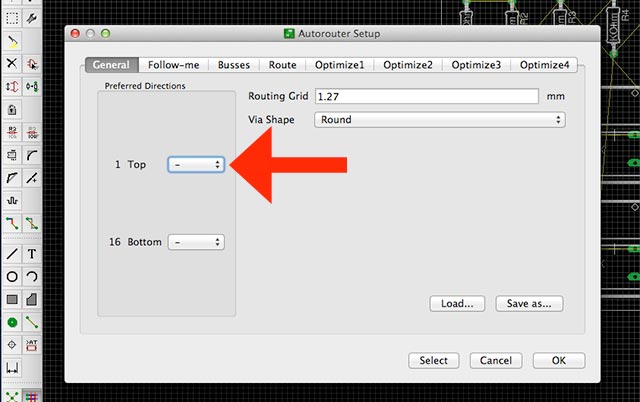
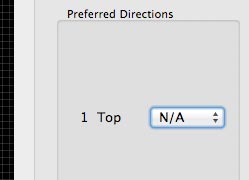
E’ necessario specificare quante facce ha la basetta, se a singola faccia, come nel nostro caso in Preferred Directions nell’opzione Top, selezionare N/A:
Click su OK e verrà eseguito il processo di creazione delle piste:
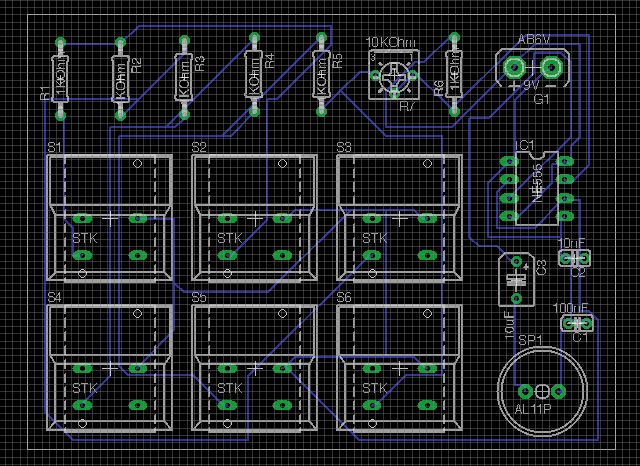
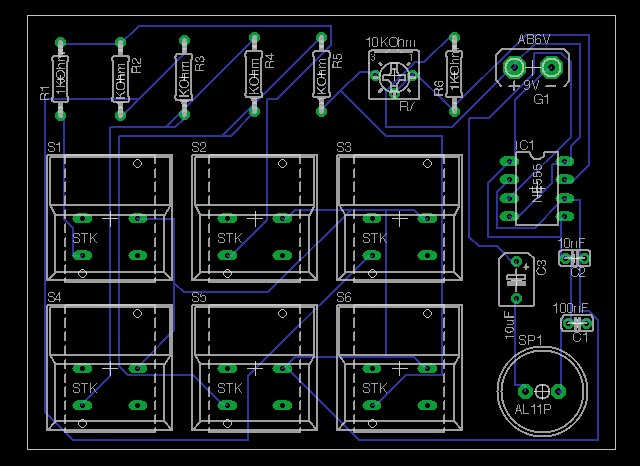
Come ben evidente dal risultato ottenuto è possibile effettuare ulteriori ottimizzazioni sulla lunghezza dei collegamenti, sull’eliminazioni di angoli a 90° e molto altro.
Oggi Massimo Banzi insieme al CEO di Intel Brian Krzanich durante la conferenza di apertura del Maker Faire di Roma ha annunciato un nuovo prodotto realizzato in collaborazione con Intel: Intel Galileo.
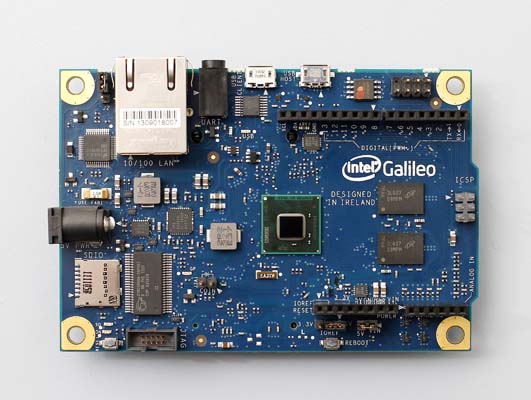
La scheda Intel Galileo è il primo prodotto di una nuova famiglia di schede Arduino Certified caratterizzate da architettura Intel. La piattaforma è di facile utilizzo e la programmazione ben si adatta ai meno esperti ma anche a chi desidera implementare oggetti tecnologicamente evoluti.
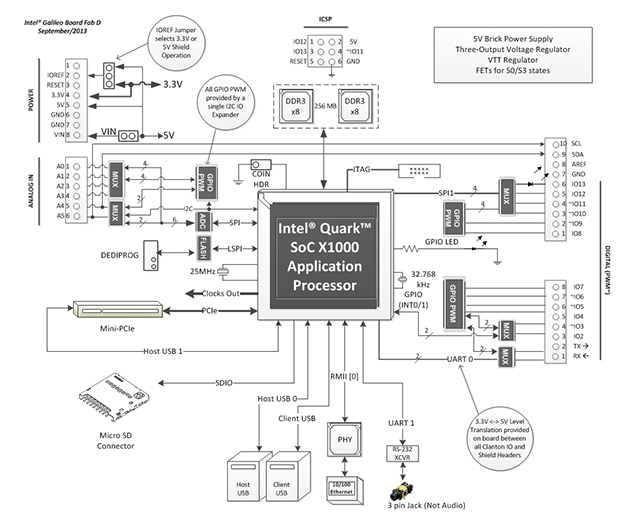
Galileo è un microcontrollore Intel Quark SoC X1000, processore a 32 bit Intel della classe Pentium.
La scheda Galileo è uno strumento per la prototipazione rapida di semplici progetti interattivi come giochi di luce che rispondono in grado di interagire con i social media, per la realizzazione di progetti più complessi dal’automazione di elettrodomestici, costruzione di robot controllati da smartphone.
Durante la conferenza il CEO di Intel, Brian Krzanich ha annunciato una donazione di 50.000 schede Galileo da donare a 1.000 università di tutto il mondo nel corso dei prossimi 18 mesi.
Intel Galileo sarà disponibile dal 29 novembre 2013.
fonte: blog.arduino.cc
Dopo dodici ore di duro lavoro il nuovo sito di arduino.cc è on-line. Ottimo design!
