Sono contento di condividere con voi EduRobot MicroMoto, nato durante lo svolgimento di un corso per insegnanti della scuola primaria e secondaria di primo grado ed è un mio esempio di come la tecnologia possa essere inclusiva e stimolante utilizzando strumenti semplici.
Probabilmente la parola che meglio di tutte descrive questo progetto è: “semplicità”, sia nella costruzione che nell’utilizzo.
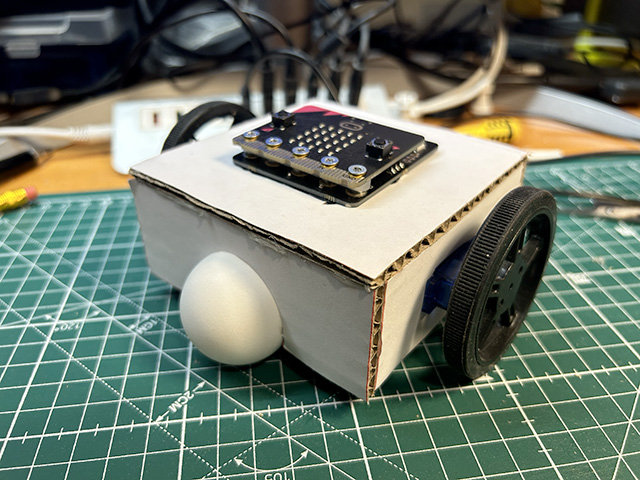
Volutamente compatto e simmetrico, le dimensioni sono di 10×10 cm, ha la forma di una scatolina, le cui falde sono state unite con colla a caldo. Questa scelta di assemblaggio, suggerita dai colleghi della primaria, ha reso il processo di assemblaggio non solo più sicuro ma anche più rapido rispetto alla prima versione in cui utilizzavo viti, ciò ha semplificato e velocizzato la fase costruttiva.
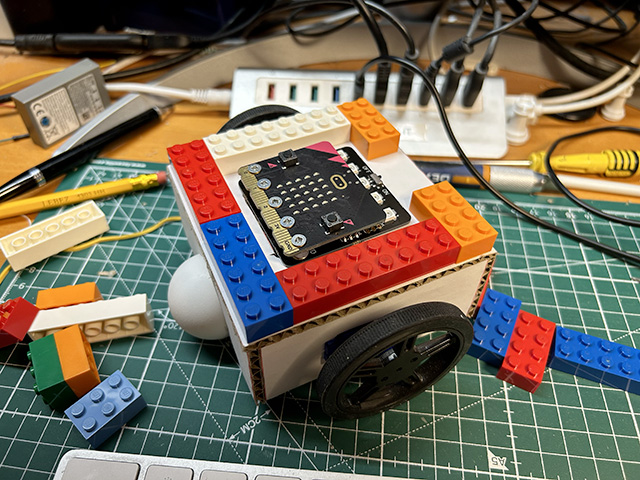
L’uso del cartone rende agevole l’espandibilità e la personalizzazione, infatti si parte da una base di cartone da 4 mm di spessore, ricoperta da un foglio bianco con stampati i contorni per il taglio, in questo modo gli studenti possono dare sfogo alla loro creatività colorando e personalizzando le facce bianche. Inoltre come mostrate nelle immagini che seguono MicroMoto può essere migliorato incollando sulle sue facce blocchetti Lego, permettendo così di adattarlo a diverse necessità didattiche.
Il piccolo robot è controllato da BBC micro:bit ed il controllo motori è affidato a :MOVE di Kitronik, una soluzione intuitiva che permette una facile gestione dei servomotori a rotazione continua. Questi ultimi, fissati alla struttura senza viti ma con l’ausilio di elastici, conferiscono al robot una grande praticità di montaggio e manutenzione.
Ovviamente potranno essere utilizzate anche altre tipologie di schede di controllo, una versione che sto realizzando per un altro corso prevede l’utilizzo di una scheda Arduino.
Condivido il file PDF con le 5 facce di taglio. Io ho utilizzato un foglio bianco A4 adesivo, ma potete utilizzare un normalissimo foglio di carta che incollerete con la colla sul cartone.
Se volete insieme a me costruire il robot nei prossimi mesi organizzerò un corso in presenza per insegnanti in cui mostrerò come realizzare e programmare EduRobot MicroMoto, se siete interessati potete seguire il link per la preadesione, sarete da me ricontattati quando il corso sarà disponibile.
Di seguito le fasi di costruzione EduRobot MicroMoto.
Procurarsi un foglio di carta A4 e stampare il profilo di taglio.
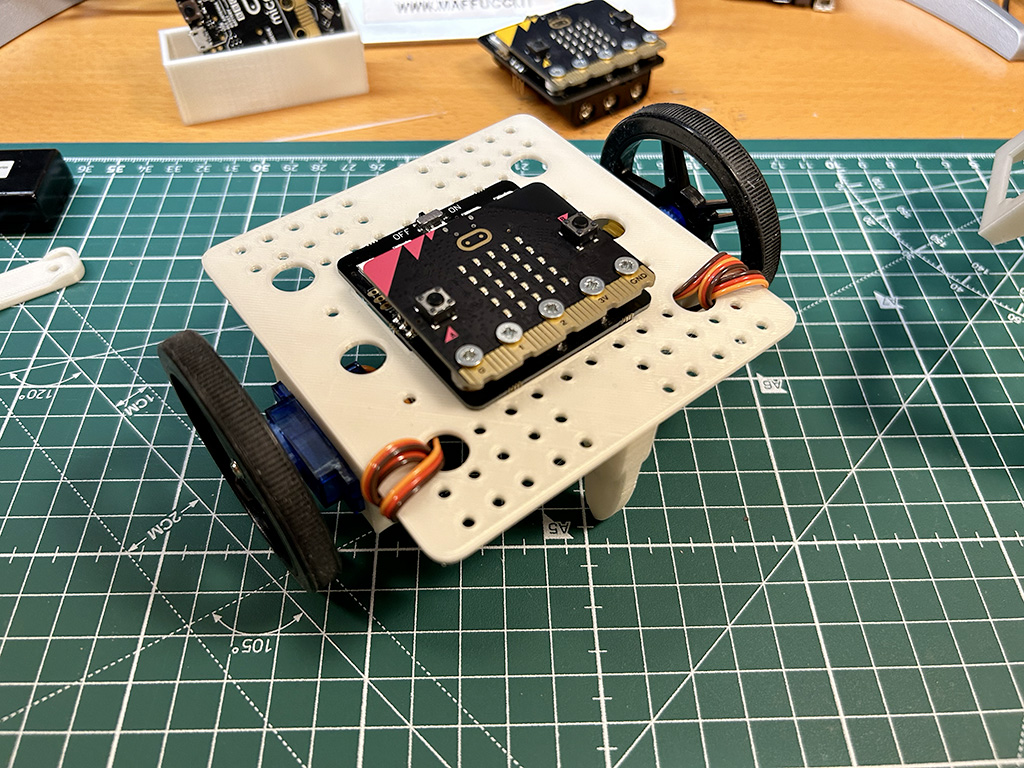
BitSquare quadrato nel design, semplicità nella realizzazione di attività introduttive di Coding e robotica a scuola.
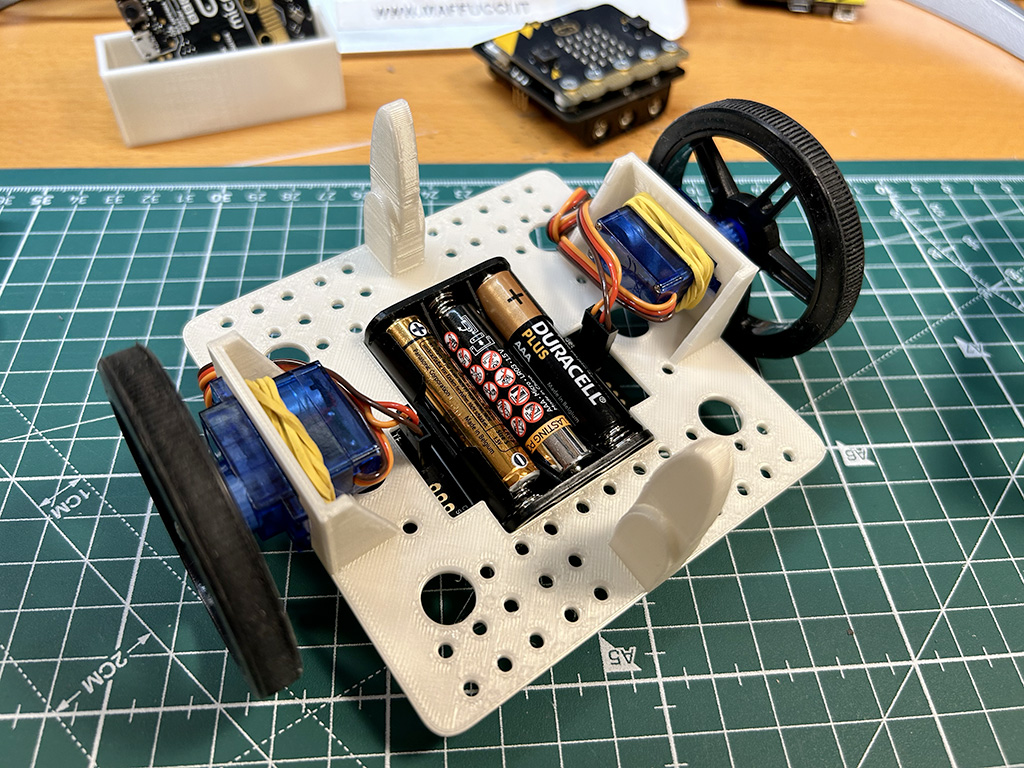
Per la lezione che ho condotto oggi per i colleghi che stanno seguendo il mio corso di Didattica della Robotica, organizzato dal CTS di Cosenza, ho progettato un semplice supporto che ospita il Servo:Lite di Kitronik e BBC micro:bit e due servomotori. Nessuna vite di blocco per i servomotori ma elastici che evitano la fuoriuscita dei motori dalle loro sedi, le uniche viti da usare sono quelle che fissano le ruote all’albero del motore.
La progettazione ha richiesto circa 1 ora di lavoro e come sempre sfrutterò questo progetto per svolgere tra qualche settimana un’attività di sperimentazione con alcune classi prime e seconde superiori dell’ITIS passando da una programmazione a blocchi, Blocks, per giungere poi all’uso di MicroPython.
Espansioni già richieste da alcuni colleghi della primaria: aggiungere l’alloggiamento per una penna.
Il costo di stampa è meno di 1€ mentre il tempo di stampa e di quasi due ore, ma questi valori possono scendere in funzione della tipologia di filamento e stampante.
Per gli esercizi di utilizzo lascio a voi, durante i corsi che svolgo, su questo prototipo e strutture similari, propongo numerose schede di lavoro.
Alcuni lettori hanno notato nella lezione in cui ho condiviso i sorgenti per la stampa 3D del robot, che la scheda motori utilizzata è una Adafruit Motor Shield V01 e mi è stato fatto notare che esiste la V02 della scheda, quindi perché ho usato la versione precedente? La risposta non è tecnica ma economica, ho acquistato ad un prezzo interessante, su uno store cinese, una grande quantità di queste schede che poi ho usato per i miei corsi. Ovviamente nulla vieta che voi possiate utilizzare una qualsiasi altra scheda, la logica di programmazione è la medesima, ma certamente varieranno il nome delle istruzioni che controllano il motore, se avete necessità contattatemi.
Lista componenti
N. 1 Arduino UNO R3
N. 1 Adafruit Motor Shield V01
Modulo Bluetooth HC05
N. 4 Motori DC 6V
N. 4 Ruote
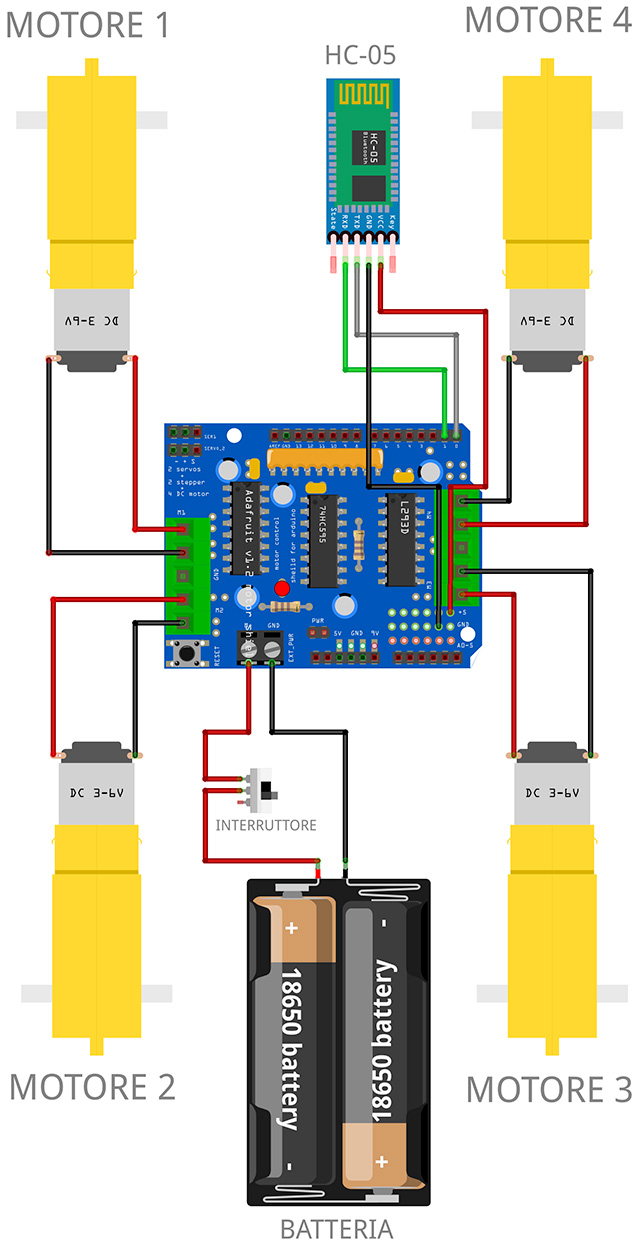
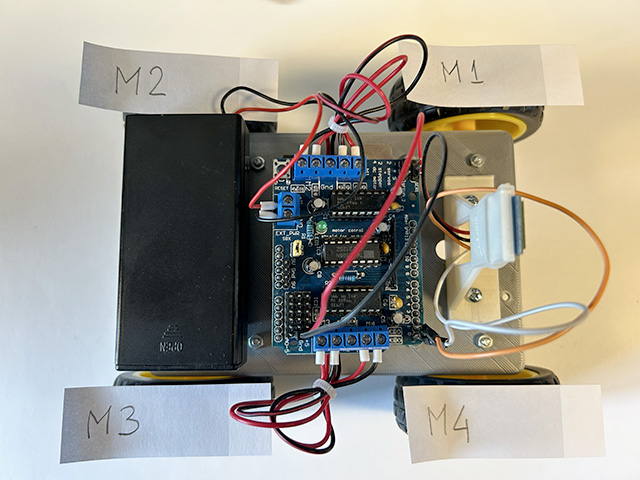
Di seguito trovate i collegamenti elettrici effettuati e il primo sketch di esempio con cui parto per svolgere le successive esercitazioni. Per gli allievi e i docenti che si iscriveranno ai miei corsi darò ulteriori esempi e spiegazioni.
Lo shield per il controllo motori può gestire fino a 4 motori DC in entrambe le direzioni, ciò vuol dire che possono essere azionati sia in avanti che all’indietro. La velocità può anche essere variata con incrementi dello 0,5% utilizzando PWM integrato sulla scheda, ciò permetterà un movimento uniforme e non brusca del robot.
Il ponte H presente sulla scheda può pilotare carichi NON superiori ai 0,6A o che hanno picchi di richiesta corrente NON superiori a 1,2A, quindi utilizzate questa scheda per piccoli motori, i classici motori gialli da 6V vanno più che bene.
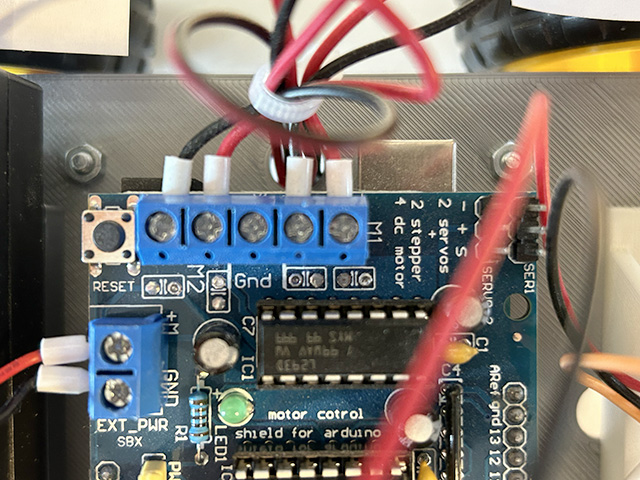
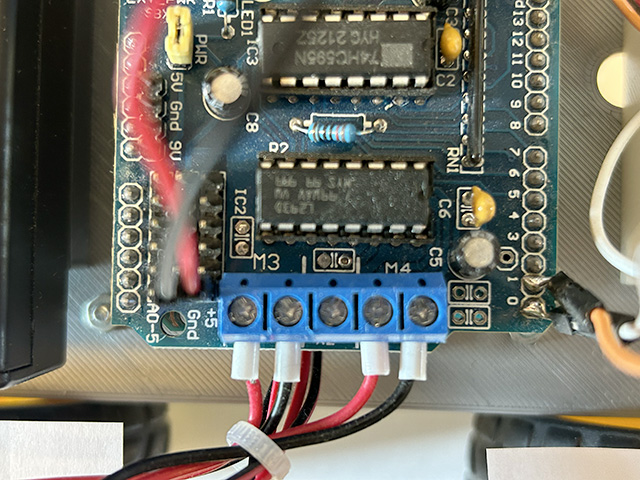
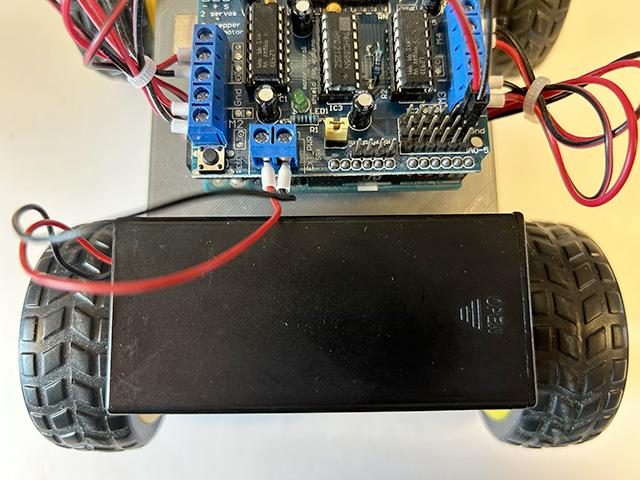
Collegamento motori allo shield Arduino Motor Driver
Come indicato nell’immagine che segue è molto semplice:
– saldate due cavi al motorino (in commercio trovate motori con fili saldati)
– collegate i motori ai morsetti: M1, M2, M3 o M4.
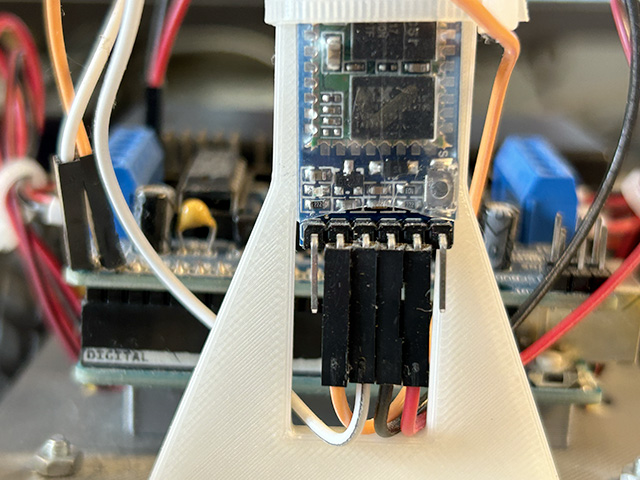
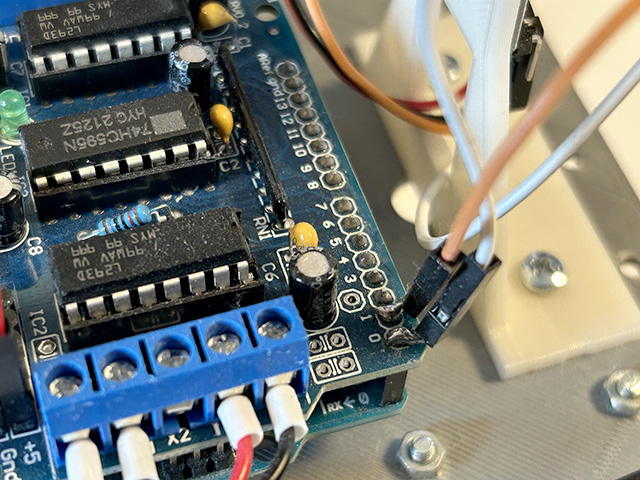
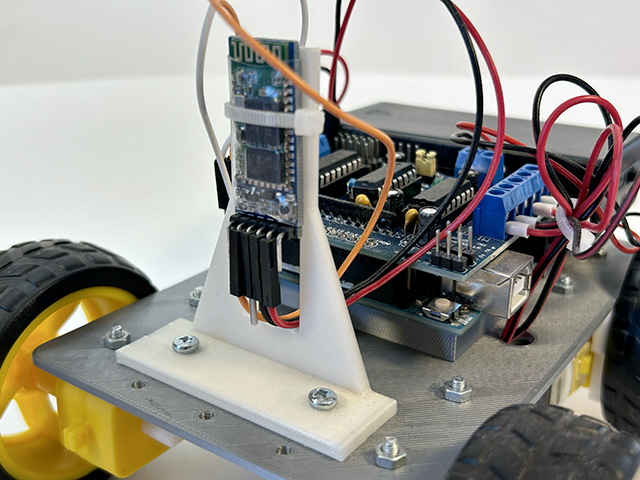
Collegamento scheda Bluetooth HC-05 allo shield Arduino Motor Driver
Come sicuramente saprete, il modulo Bluetooth HC-05 permette di convertire una porta seriale UART in una porta Bluetooth e la utilizzeremo per inviare su seriale i caratteri selezionati da una specifica app Android, per comandare direzione e velocità dei motori del robot.
I collegamenti sono:
HC05 <-> Arduino Motor Driver RX - Pin 1 TX - Pin 0 G - GND V - +5V
Orientamento ruote.
Collegamento motori M1 e M2.
Collegamento motori M3 e M4.
Modulo Bluetooth HC-05.
Connessione dei pin RX e TX del modulo Bluetooth HC-05 alla seriale di Arduino (pin 0 e pin 1).
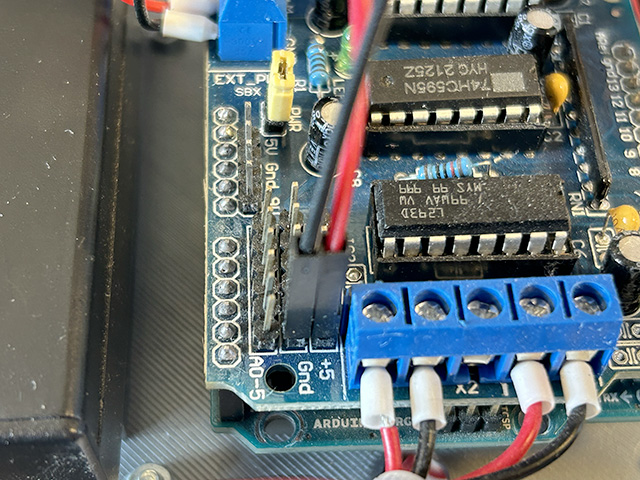
Alimentazione del modulo Bluetooth HC-05 attraverso lo shield.
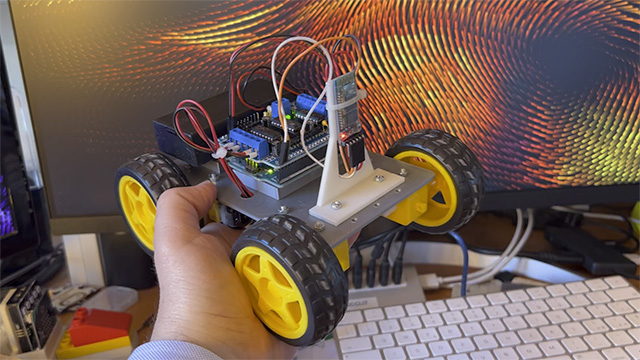
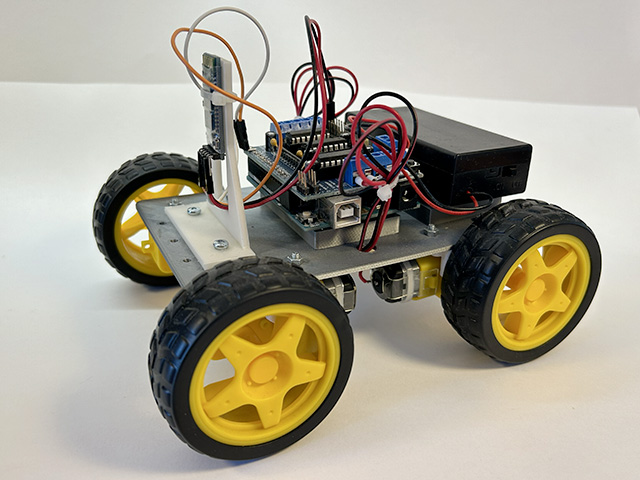
Avevo promesso qualche mese fa che avrei rilasciato i sorgenti grafici di EduRobot 4WD e lo scorso giugno studenti di alcune scuole italiane mi hanno chiesto la cortesia di rendere disponibili i sorgenti per la stampa 3D. Gli impegni di fine anno non mi hanno permesso di essere celere nella pubblicazione e visto che domani è l’inizio di un nuovo anno scolastico rendo disponibile la semplice base robotica in modo che possa essere utilizzata e spero anche migliorata dagli allievi.
Ma qual è l’idea progettuale di base di EduRobot 4WD?
Come ribadito nel post di presentazione di EduRobot 4WD, durante le attività laboratoriali di robotica con studenti e docenti, spesso la costruzione della parte meccanica richiede molta attenzione e tempo. Per questo motivo, ho deciso di realizzare un design semplice, ma funzionale, su cui poter facilmente integrare qualsiasi sistema di controllo elettronico. Pertanto per rendere la programmazione più stimolante e varia, ho progettato un robot 4WD che può avere diverse funzionalità: può essere comandato via Bluetooth o WiFi, può operare autonomamente, seguire persone, reagire alla luce, rilevare gas, seguire una linea, o ancora rispondere ai comandi vocali.
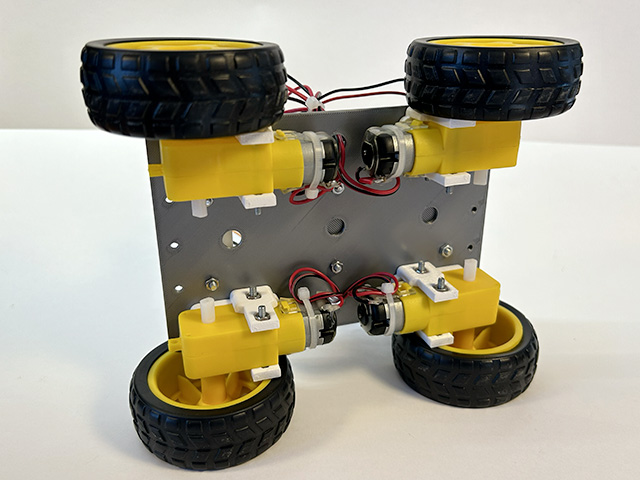
In questa struttura le parti che necessitano di solidità sono vincolate da viti metalliche mentre i circuiti di controllo e le batterie di alimentazione sono fissate con velcro a forte tenuta. L’utilizzo del velcro è stata una soluzione che mi ha permesso di ridurre le fasi di assemblaggio e di modifica della struttura. Ovviamente una struttura di questo genere non è cosa nuova, potete ritrovare design simili realizzati in compensato o in plexiglass su cui ad esempio i motori sono vincolati con colla a caldo, ma ciò ovviamente non permette di riutilizzare velocemente i motori per altre esercitazioni; inoltre le forcelle che vincolano i motori possono essere riutilizzati anche in altri kit che ho sviluppato, si veda ad esempio EduRobot Black Panther.
In questo modello, gli elementi che richiedono maggiore robustezza sono assicurati con viti metalliche, mentre i circuiti di controllo e le batterie di alimentazione sono fissate con velcro a forte tenuta. La scelta del velcro ha notevolmente semplificato e velocizzato le fasi di assemblaggio e modifica. Ovviamente una struttura di questo genere non è cosa nuova, potete ritrovare design simili realizzati in compensato o del plexiglass in cui ad esempio i motori sono vincolati con colla a caldo, ma ciò ovviamente non permette di riutilizzare velocemente i motori per altre esercitazioni; inoltre le forcelle che vincolano i motori possono essere riutilizzati anche in altri kit che ho sviluppato, si veda ad esempio EduRobot Black Panther.
La sequenza di assemblaggio è estremamente semplice, bisogna porre attenzione solo all’orientamento dei motori, ma le foto che seguono mostrano tutti i dettagli che vi permetteranno di assemblare il robot in circa 15 minuti.
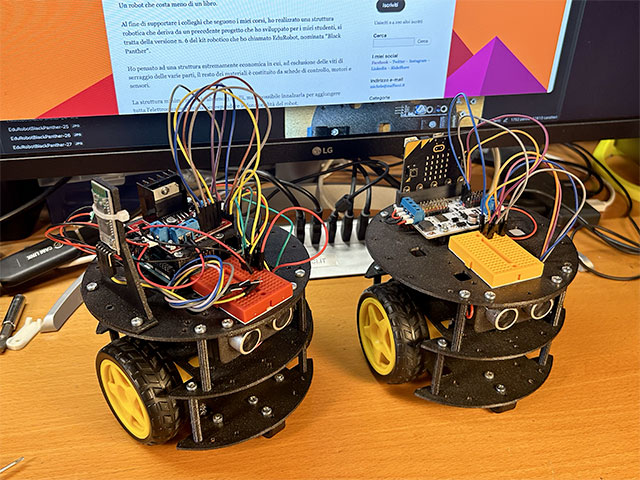
Nelle foto potete vedere le due versioni:
controllo remoto Bluetooth
segui linea
Non posso mostrarvi la versione WiFi e con telecamera in quanto in questo momento sono disassemblati.
Ovviamente se serve, con piccole modifiche, potrete realizzare una versione a più livelli in modo da aggiungere tutti i circuiti che vi servono.
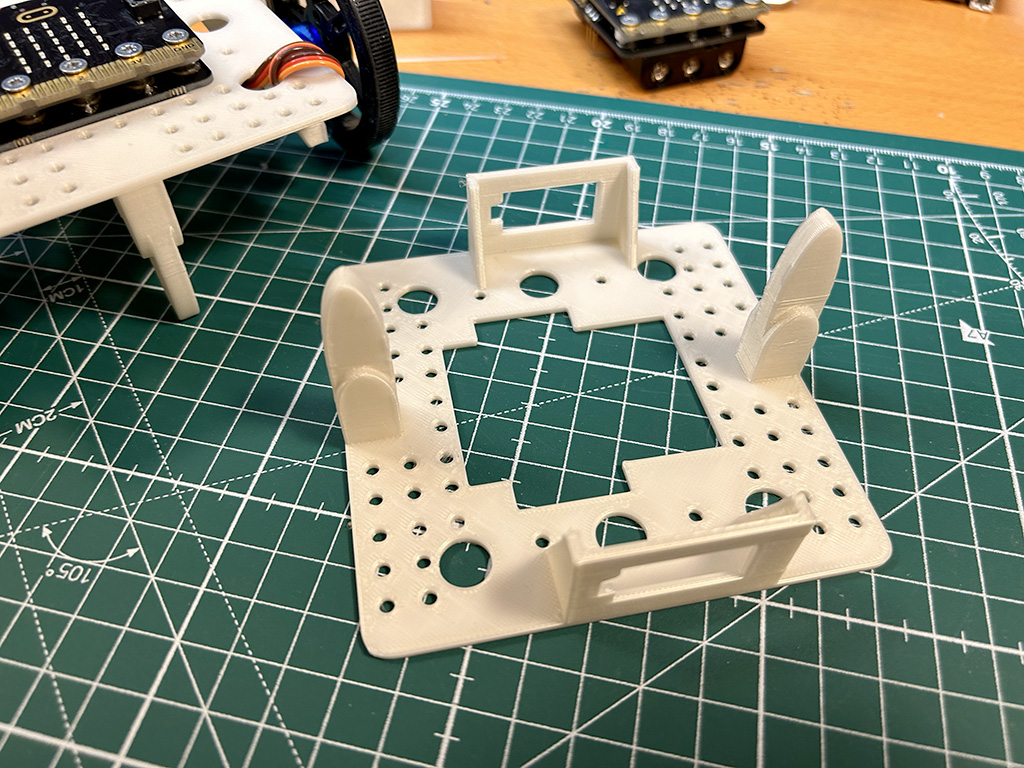
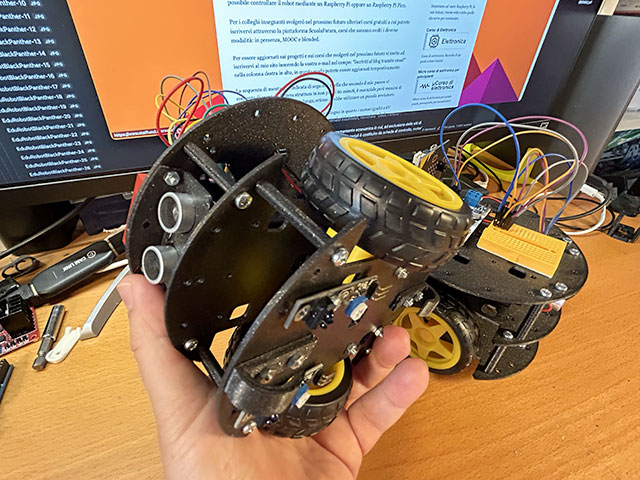
Al fine di supportare i colleghi che seguono i miei corsi, ho realizzato una struttura robotica che deriva da un precedente progetto che ho sviluppato per i miei studenti, si tratta della versione n. 6 del kit robotico che ho chiamato EduRobot, nominata “Black Panther”.
Ho pensato ad una struttura estremamente economica in cui, ad esclusione delle viti di serraggio delle varie parti, il resto dei materiali è costituito da schede di controllo, motori e sensori.
La struttura minima richiede almeno 3 livelli, ma è possibile innalzarla per aggiungere tutta l’elettronica necessaria per espandere le funzionalità del robot.
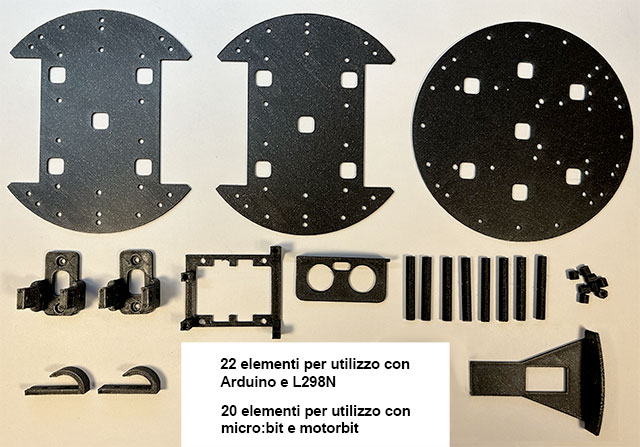
Tutti gli elementi sono stati stampati in 3D ed il materiale scelto è il PLA.
I costi complessivi di stampa, viti di serraggio e dadi, non supera i 10€.
Le funzioni che possono essere programmate sono le medesime dei più blasonati kit robotici in commercio, pertanto se la vostra scuola ha acquistato una stampante 3D, sarà sufficiente una manciata di elettronica a basso costo per realizzerete robot assolutamente inclusivo, sia per il portafoglio delle famiglie degli allievi che di quelle del docente.
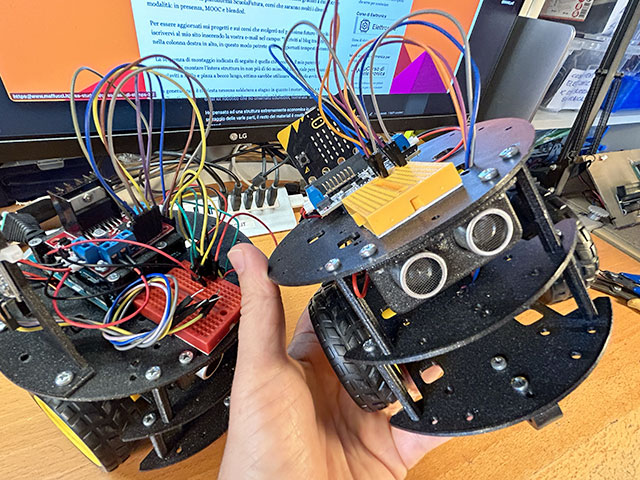
Il cilindro di occupazione del robot ha un diametro di 135 mm e i motori sono esattamente centrati rispetto alla base del cilindro.
Per evitare spese aggiuntive al posto delle caster ball ho preferito utilizzare un elemento dotato di superficie curva, ovviamente tale elemento se lo desidera può essere sostituito da una caster ball metallica.
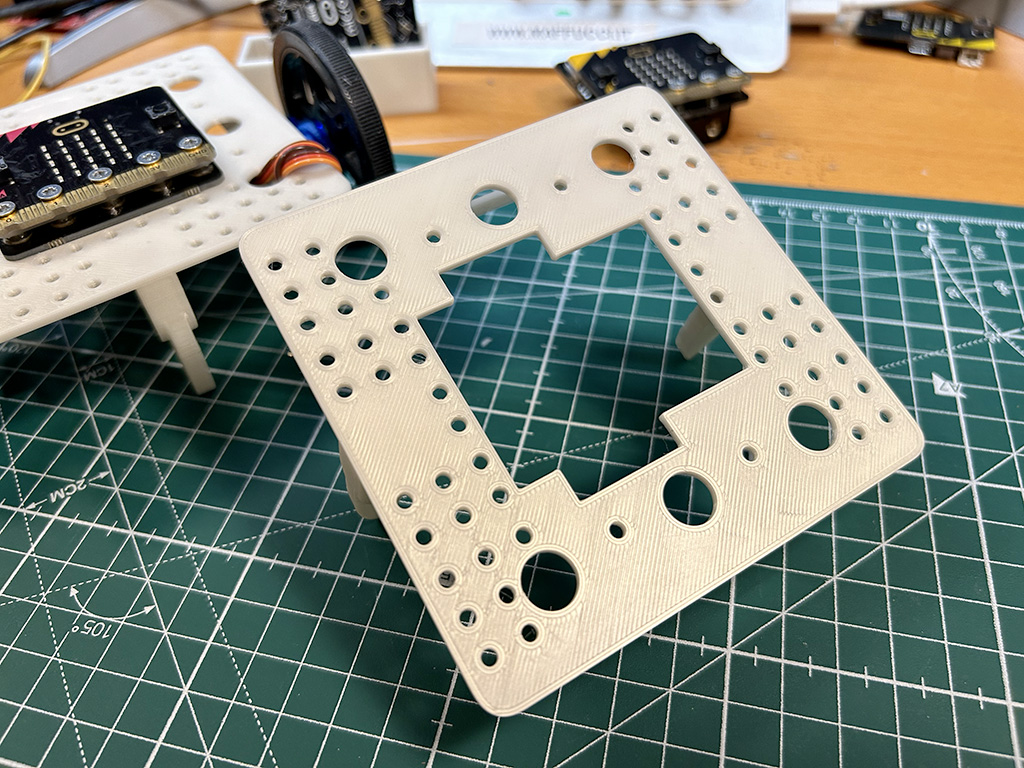
Sul terzo livello del robot sono stati già inseriti fori per fissare i microcontrollori: Arduino UNO R3 e BBC micro:bit e computer Raspberry Pi 3 o 4.
Sempre sul terzo livello nel caso si desidera utilizzare un BBC micro:bit, è possibile fissare una scheda motorbit.
Nel caso il controllo avvenisse con Arduino UNO R3 la scheda di controllo motori è costituita da un L298N che andrà impilato sulla scheda Arduino, secondo quanto indicato nel tutorial che segue.
Nei kit di base sul 3’ livello viene utilizzata una minibreadboard per facilitare la connessione tra i vari dispositivi elettronici.
Per entrambe le versioni il robot è dotato di un sensore ad ultrasuoni HC-SR04 fissato alla struttura. Per la valutazione della distanza dell’ostacolo si è preferito evitare l’utilizzo di un servomotore che facesse ruotare il sensore ad ultrasuoni al fine di ridurre i costi. La rotazione che valuta la distanza dell’ostacolo più vicino verrà svolta ruotando l’intero robot rispetto al suo baricentro.
Il robot è dotato di due sensori ad infrarossi da impiegare per la realizzazione di un robot segui linea.
Nella versione con scheda Arduino UNO R3 sarà possibile effettuare un controllo mediante scheda Bluetooth HC-05, il cui supporto potrà essere fissato sul terzo piano del robot.
Di seguito la lista dei materiali e le relative fotografie che ne dettagliano la costruzione delle parti meccaniche e delle schede, non viene dettagliata la connessione elettrica tra le parti e la programmazione, per ora riservato ai colleghi che frequentano o frequenteranno i miei corsi, ma molto probabilmente nel prossimo futuro, con un po’ di calma lavorativa estenderò a tutti la parte di spiegazione elettronica e programmazione.
Sto sviluppando corsi in cui mostro come, usando la medesima struttura robotica, sarà possibile controllare il robot mediante un Raspberry Pi oppure un Raspberry Pi Pico.
Per i colleghi insegnanti svolgerò nel prossimo futuro ulteriori corsi gratuiti a cui potrete iscrivervi attraverso la piattaforma ScuolaFutura, corsi che saranno svolti i diverse modalità: in presenza, MOOC e blended.
Per essere aggiornati sui progetti e sui corsi che svolgerò nel prossimo futuro vi invito ad iscrivervi al mio sito inserendo la vostra e-mail nel campo: “Iscriviti al blog tramite email” nella colonna destra in alto, in questo modo potrete essere aggiornati tempestivamente.
La sequenza di montaggio indicata di seguito è quella che secondo il mio parere vi consente di montare l’intera struttura in non più di 60 minuti, è essenziale però munirsi di cacciaviti a stella e pinza a becco lungo, ottimo sarebbe utilizzare un piccolo avvitatore.
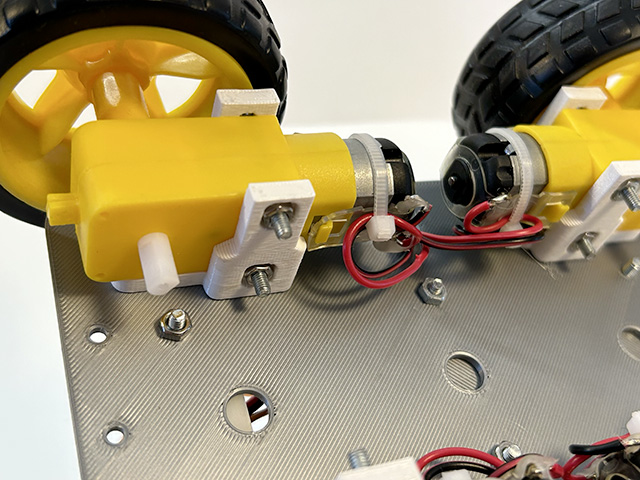
In generale non è richiesta nessuna saldatura a stagno in quanto i motori (gialli) a 6V utilizzati possono essere acquistati anche con cavi già saldati, attenzione però che la connessione tra motore e cavi elettrici potrebbe essere delicata, pertanto si consiglia di serrare i cavi mediante una fascetta stringicavi, come dettagliato di seguito.
Se è necessario prolungare la lunghezza dei cavi è possibile adottare diversi metodi, quello che preferisco è l’utilizzo di connettori wago che possono essere acquistati con diverso numero di fori, nel caso di questo kit robot sono sufficienti wago da 3 fori.
Ovviamente, nel caso di rotture o disconnessione dei cavi dai poli del robot bisognerà per forza ricorrere alla saldatura a stagno.
La fotografia che segue mostra tutti gli elementi da stampare in 3D per le due versioni di robot.
Di seguito elenco materiali e sequenza di montaggio.