Idee che nascono sotto l’ombrellone 🙂
Qualche mese fa parlavo con l’amica e collega Maria Grazia Berardo dell’IIS Vallauri: “Michele se ti chiedessi di progettare un robot con gli allievi che tipologia realizzeresti?”
Io: “sicuramente un cingolato”
Maria Grazia: “ecco come tutti i ragazzi preferite i cingoli! 🙂 ma da cosa dipende?”
Io: “… banalmente dal fatto che da bambino sognavo di guidare un escavatore o un trattore cingolato… e poi posso andare ovunque… ed il rumore del motore… sinfonia 😊… ma in ogni caso dipende dal contesto e dalla gara robotica”
Maria Grazia: “ma sai che nel decidere con i miei allievi quale tipo di robot costruire per le varie gare robotiche quasi tutti i ragazzi hanno optato per un cingolato… sarà come per te qualcosa che nasce dall’infanzia 😀”
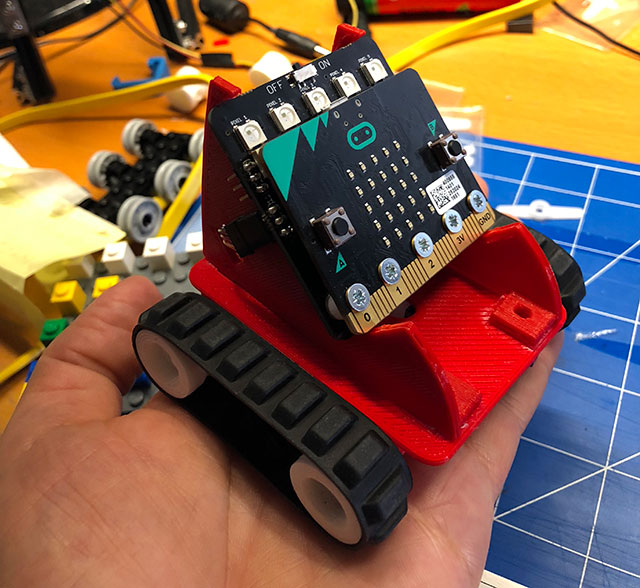
E per non smentirmi era da tempo che desideravo mettere i cingoli al DotBot:bit e surfando senza meta sul web sono giunto al gruppo Facebook Tiny Trak – Micro FPV Crawler che mi ha colpito, potrete vedere molti piccoli cingolati con telecamera. Il progetto mi ha ricordato una chiacchierata fatta qualche hanno fa ad un JobOrienta con un artificiere della Polizia di Stato in cui si parlava di realizzazione di micro robot con telecamera a bassissimo costo di produzione da far transitare in tubazioni o spazi ristretti… al tempo le micro telecamere erano parecchio costose, i tempi sono cambiati e gli obiettivi pure… didattica e gioco 😊
Ulteriori risorse su questa tipologia di cingolati le potete trovare su Thingiverse trovate molte informazioni.
Facendo il mix tra i progetti trovati sul gruppo Tiny Track e quanto già fatto per DotBot:bit ho realizzato velocemente il primo prototipo del piccolo cingolato. Per velocizzare la produzione ho utilizzato un cingolo Lego e modificato strutture già realizzati da altri.
Renderò disponibile tutto nei prossimi giorni, voglio solamente ottimizzare i supporti che reggono il micro:bit, bilanciare il tutto e costruire qualche piccolo esempio di programmazione.
Nel caso abbiate suggerimenti/necessità utili per le sperimentazioni che desiderate fare con i vostri allievi volentieri accetto suggerimenti.
Buon Coding a tutti.
 Durante tutte le attività di formazione che conduco sulle tecnologie didattiche uno dei moduli che svolgo riguarda i metodi di gestione del tempo per lo studio e la progettazione didattica utilizzando software specifici su qualsiasi piattaforma.
Durante tutte le attività di formazione che conduco sulle tecnologie didattiche uno dei moduli che svolgo riguarda i metodi di gestione del tempo per lo studio e la progettazione didattica utilizzando software specifici su qualsiasi piattaforma. 

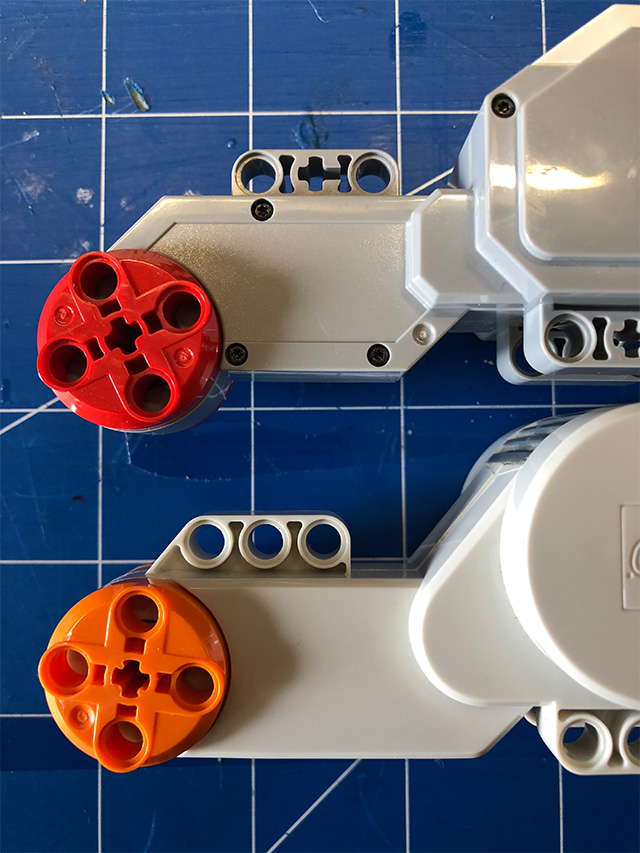
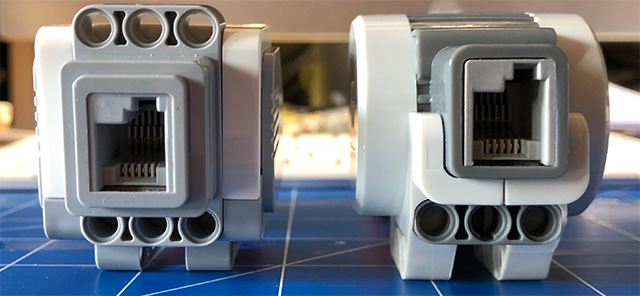
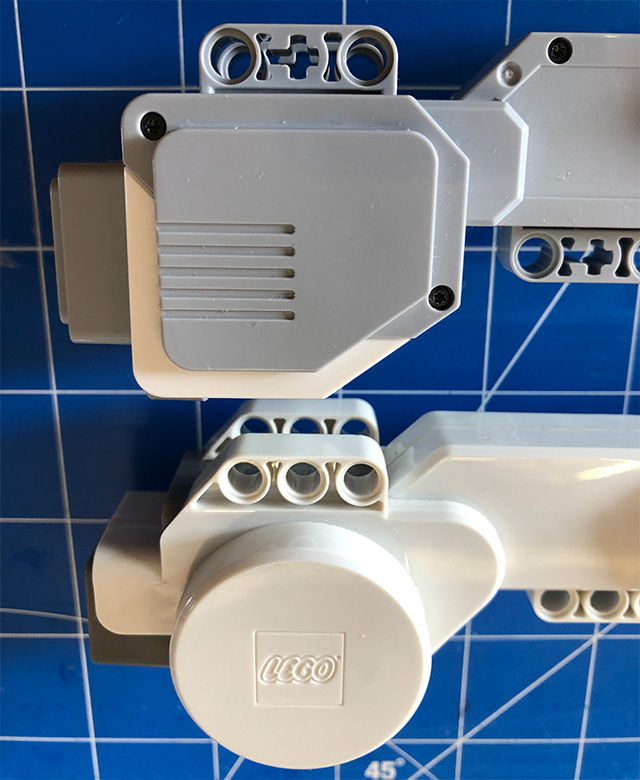
 I due motori hanno circa le stesse dimensioni, però ad un esame più attento, i due motori richiedono procedure di montaggio diverse. Il motore NXT ha tutti i fori arrotondati, mentre i collegamenti del motore EV3 hanno fori arrotondati e trasversali. Il motore EV3 ha anche una fila aggiuntiva di tre fori vicino al connettore elettrico e ciò lo rende più versatile. I fori del motore EV3 sono molto più bassi e alcuni sono addirittura spostati su un lato.
I due motori hanno circa le stesse dimensioni, però ad un esame più attento, i due motori richiedono procedure di montaggio diverse. Il motore NXT ha tutti i fori arrotondati, mentre i collegamenti del motore EV3 hanno fori arrotondati e trasversali. Il motore EV3 ha anche una fila aggiuntiva di tre fori vicino al connettore elettrico e ciò lo rende più versatile. I fori del motore EV3 sono molto più bassi e alcuni sono addirittura spostati su un lato.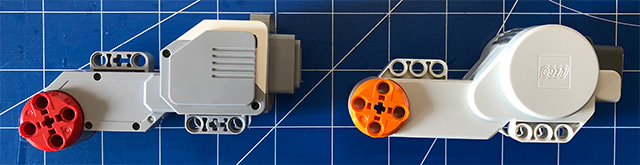
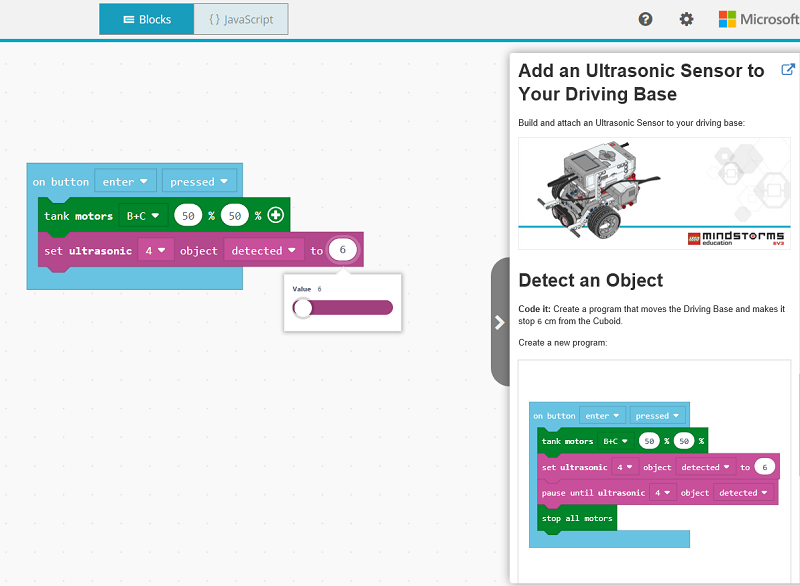
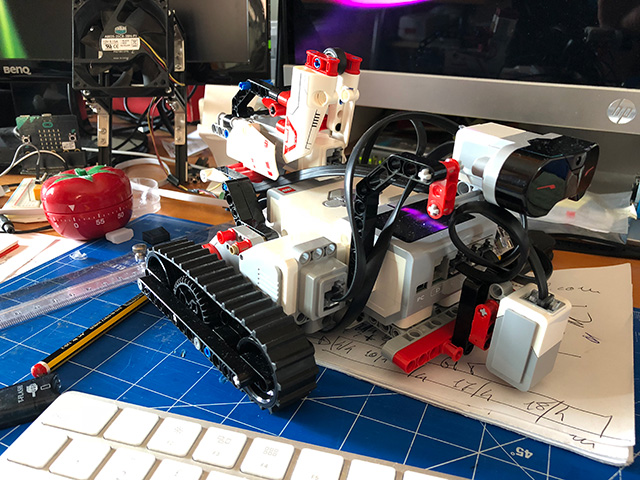
 Bene detto ciò, riapro le vecchie scatole e parto con il Coding su Lego.
Bene detto ciò, riapro le vecchie scatole e parto con il Coding su Lego.