Sto ricevendo diverse mail da colleghi che mi chiedono quali materiali acquistare affinché possano produrre insieme a me durante il corso gli stessi robot che andremo prima a progettare e poi costruire.
L’idea, come esposta nella presentazione del corso, è quella di creare qualcosa a bassissimo costo con materiali economici.
Io vi mostrerò come progetto e come ho progettato alcuni kit che ho utilizzato per i miei allievi che ho poi modificato nella struttura per renderli più semplici da assemblare da parte di utenti che non hanno mai affrontato queste sperimentazioni.
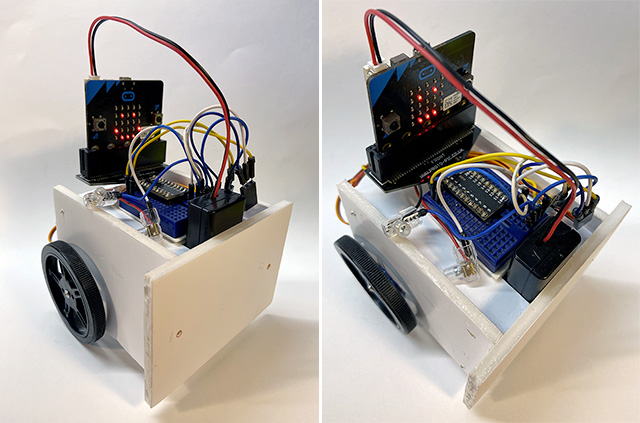
Partirò dalla realizzazione di una struttura realizzata in Foam Core su cui disporremo dei servomotori a rotazione continua il tutto controllato da un micro:bit che programmeremo per far fare semplici movimenti al robot. Successivamente vi mostrerò come controllare remotamente il robot mediante un secondo micro:bit. Successivamente aggiungeremo qualcosa per rendere il robot autonomo nei movimenti e cercare il più possibile di evitare ostacoli.
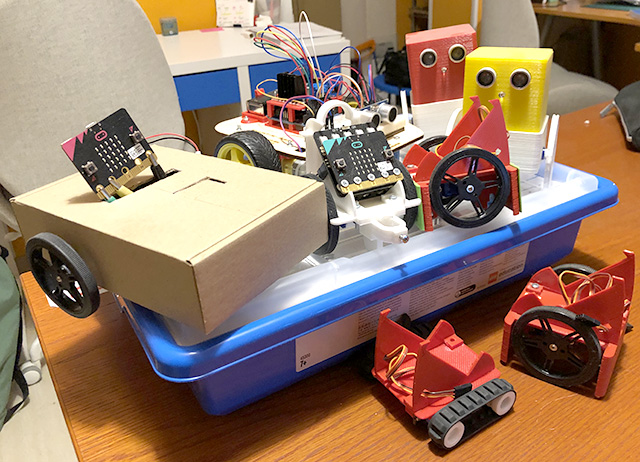
Questo che vedete di seguito è uno dei prototipi realizzati per preparare il corse, ne saranno mostrati anche altri e molto probabilmente vi proporrò anche altre soluzioni di piccoli bracci robot ed insetti robot, nel caso i tempi non consentissero di mostrare tutti i progetti lascerò ai corsisti i sorgenti grafici per la realizzazione.
Vi mostrerò inoltre come realizzare una struttura diversa interamente stampata in 3D simile a quelle che trovate nella sezione BBC micro:bit di questo sito.
Di seguito la lista dei materiali per poter realizzare il robot mostrato sopra.
Potete trovate i materiali su diversi store online.
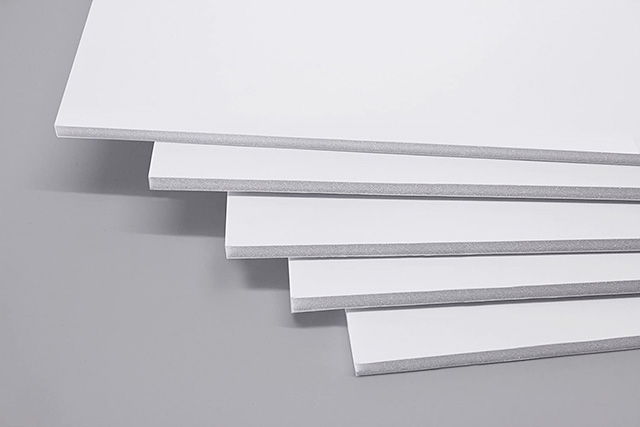
Foma Core da 5 mm
(pannello costituito da una struttura a sadwitch costituito da due superfici di carta rigida e una parte centrale di spugna)
Colla vinilica
Stuzzicadenti
Carta adesiva bianca formato A4
2 Cappellotti piccoli da (sezione filo 1,5 mm^2) oppure un mammut da 3A
Contenitore 4 batterie AA con interruttore
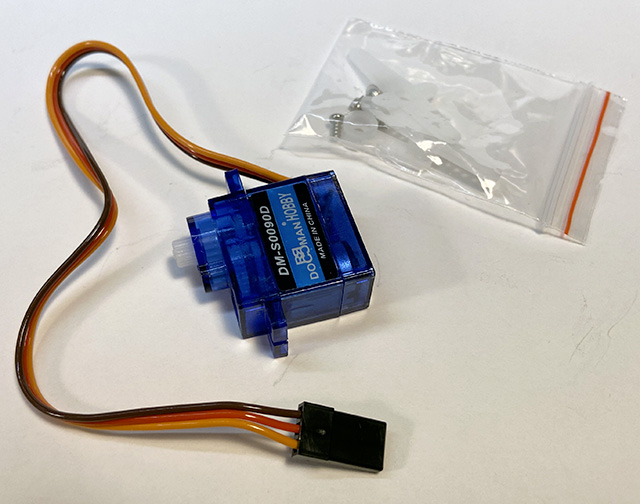
2 micro servomotori a rotazione continua (360°) a cui connetteremo le ruote
2 ruote da 60 mm per servomotori
1 biglia di vetro da 15 mm
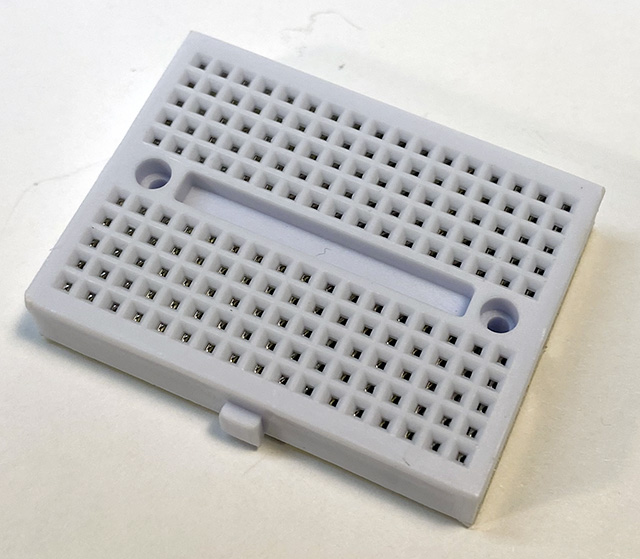
1 mini breadboard da 170 punti
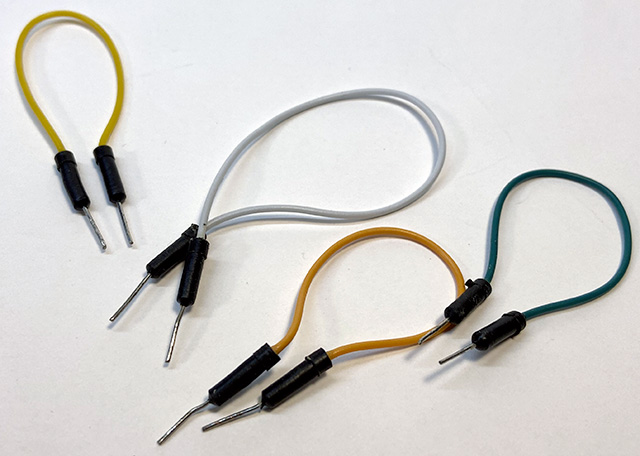
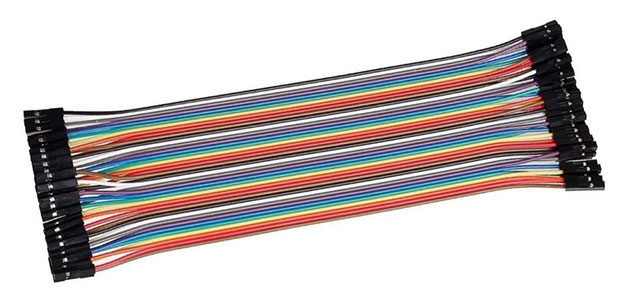
jumper corti maschio/maschio (fili da usare per la breadboard)
in alternativa filo elettrico AWG 22 oppure un pezzo di cavo di rete che dovrete sguainare e ricavarne dei pezzi di filo
Jumper maschio femmina
4 batterie AA da 1,5V (da utilizzare per alimentare i servomotori)
2 batterie AAA 1,5 V (per l’alimentazione del micro:bit, già comprese nel kit base di micro:bit)
1 contenitore per le due batterie da 1,5V AAA (già comprese nel kit base di micro:bit)
Fascette elettriche da 2mm
1 kit micro:bit base V1 oppure V2
Edge Connector Breakout Board per micro:bit
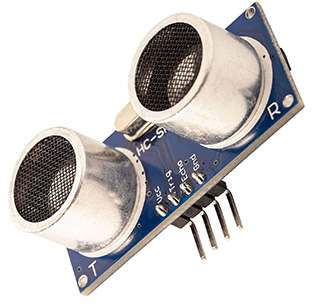
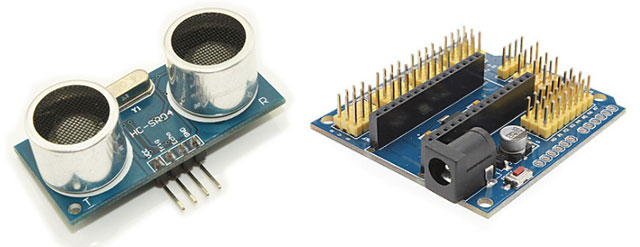
Sensore ad ultrasuoni HC-SR04
opzionale – Kitronik Servo:Lite board (che potrà essere utilizzati con progetti simili a quelli indicati nella sezione BBC micro:bit di questo sito)
Se sarà possibile mostrerò una soluzione per realizzare robot che utilizzano motori più potenti, ma per questo tipologia di progetto sarà necessario avere un po’ più di dimestichezza nella realizzazione di semplici circuiti elettronici e disporre di un saldatore elettrico a stagno, ovviamente vi lascerò tutte le indicazioni tecniche per svolgere in autonomia questa seconda tipologia di robot
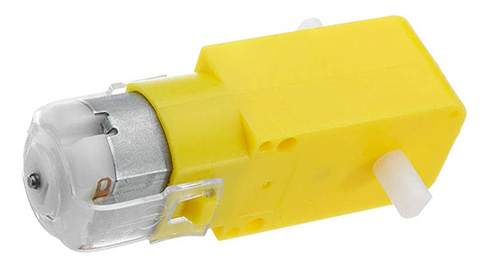
2 motori elettrici in CC 3-6V
a cui verranno collegate le ruote
2 ruote per motori elettrici 3-6V
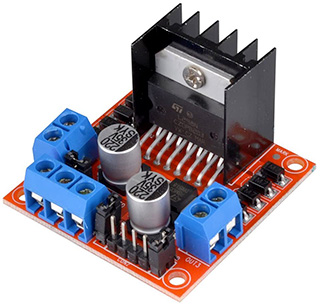
1 ponte H L298N
Vi aspetto al corso per fare insieme una rilassante attività di making 🙂
Mediante una metodologia laboratoriale, si forniranno competenze digitali finalizzate alla realizzazione di robot didattici a bassissimo costo permettendo al docente si strutturare un percorso di base per avvicinare gli studenti ai principi della programmazione e della robotica.
Il corso si sviluppa in 3 moduli e permetterà di costruire un robot partendo da zero.
Il primo modulo introduce all’uso di BBC micro:bit ed alla programmazione con Blocks Editor, un tool grafico che semplifica l’utilizzo della scheda elettronica che controllerà il robot;
Il secondo modulo introduce all’utilizzo modellazione 3D con TinkerCAD che permetterà di stampare in 3D le proprie creazioni, oppure generare i progetti necessari per realizzare i robot con compensato o cartone;
Il terzo modulo mette insieme le due competenze consentendo la costruzione ed il controllo del proprio robot didattico.
Saranno svolti 3 incontri in webinar di 2 ore ciascuno, per un totale di 6 ore
Venerdì 18 giugno 2021 – Dalle 17.00 alle 19.00
Martedì 22 giugno 2021 – Dalle 17.00 alle 19.00
Venerdì 25 giugno 2021 – Dalle 17.00 alle 19.00
BBC micro:bit per la robotica
possibilità didattiche della scheda BBC micro:bit
specifiche tecniche
programmare con JavaScript Blocks Editor
programmi di base per gestire un robot
utilizzo dell’ambiente di sviluppo e del simulatore.
Uso di TinkerCad
l’interfaccia di progettazione
piano di lavoro e manipolazione degli oggetti
operazioni tra solidi e allineamenti
duplicazione e rotazione
uso del righello
creare i propri elementi
esportazione dei file per il taglio e la stampa 3D
progettare la struttura del robot.
Assemblare il robot
componenti elettronici di base:
breadboard;
motori elettrici:
sensori;
led
programmare il robot
comandare a distanza il robot
esperienze di laboratorio.
Per maggiori informazioni sui contenuti del corso e modalità di iscrizione seguire il link allegato.
Dopo la la pubblicazione dei sorgenti grafici del SumoBot ho ricevuto mail da parte di colleghi in cui mi veniva chiesto di condividere i file pdf per la versione Foam Core del piccolo robot, come mostrato nel post: SumoFoam – per realizzare velocemente una struttura per robot didattico.
Il materiale, come dettagliato nel link, si presta molto bene per realizzare agevolmente innumerevoli strutture utili per le nostre sperimentazioni di laboratorio (qualche esempio nel link allegato), il costo del materiale non è elevatissimo ed è semplice tagliarlo con un semplice cutter. Architetti e studenti di architettura conoscono bene il Foam Core in quanto lo utilizzano per realizzare plastici di ogni tipo, ho utilizzato io stesso questo materiale in passato per costruire plastici di alloggi per la realizzazione di esercitazioni di domotica con Arduino.
Condivido pertanto i file pdf che potete stampare su un foglio A4 adesivo ed incollare poi su un foglio di Foam Core.
Condivido una versione con colore del tratto rosso per il taglio laser ed una versione con tratto nero per la stampa su foglio adesivo A4
Lavoro di PCTO a.s. 2020-2021. Anno scolastico difficile, la pandemia non aiuta assolutamente nello sviluppo di attività laboratoriali a scuola e in azienda e a tal proposito ho pensato di rivedere completamente il laboratorio iniziando dalle attività di laboratorio degli studenti del 3′ anno.
Come molti colleghi e studenti sapranno il PCTO (ex alternanza scuola lavoro) svolto al terzo anno consiste nello svolgimento di un’attività che viene integralmente realizzata a scuola in cui viene svolta una simulazione d’impresa, dalla progettazione alla creazione di un prodotto, ma il periodo è complicato e lo svolgimento delle attività avverrà in parte online ed in parte in presenza, online si effettueranno tutte le operazioni progettuali e di documentazione mentre in presenza si assemblerà l’oggetto che dovrà poi essere reso prodotto. Come per gli anni passati per le classi terze propongo un’attività basata su un kit da me progettato che i ragazzi poi dovranno modificare e migliorare sia dal punto di vista meccanico che dal punto di vista elettronico e informatico. Parto da un prodotto progettato in partenza semplicemente perché i tempi, i costi ed il periodo non permettono una progettazione da zero, ma come accade ogni anno molti ragazzi a fine attività rivedono integralmente il progetto riformulando una nuova proposta.
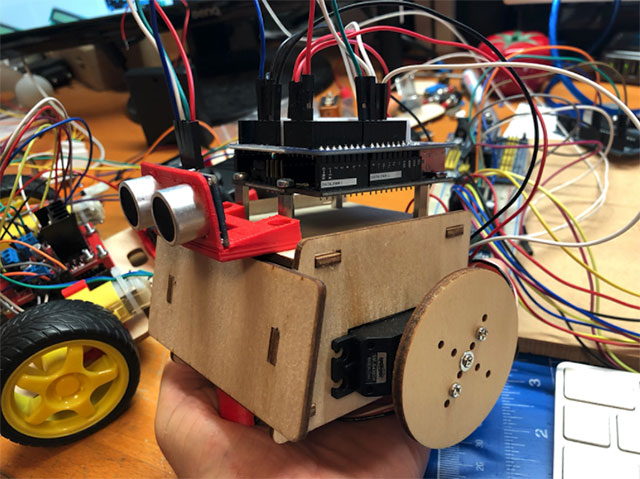
La robotica attrae sempre e prototipare piccoli robot affascina sempre i giovani studenti, pertanto ho modificato la prima versione del SumoRobot disegnato nello scorso anno scolastico, formulando una versione che potesse essere realizzata con semplicità e a costi molto bassi.
Tutti i miei studenti, di qualsiasi classe, ormai posseggono un kit Arduino con una buona dotazione di componentistica elettronica, pertanto le esercitazioni in DaD non avvengono solamente usando simulatori, ma svolgendo praticamente loro a casa ed io a casa o a scuola le esercitazioni e allo stesso modo si opererà per l’attività di PCTO, fornendo un kit agli allievi.
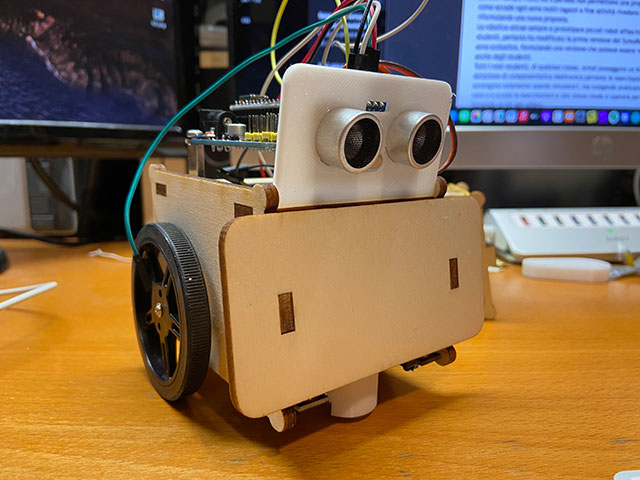
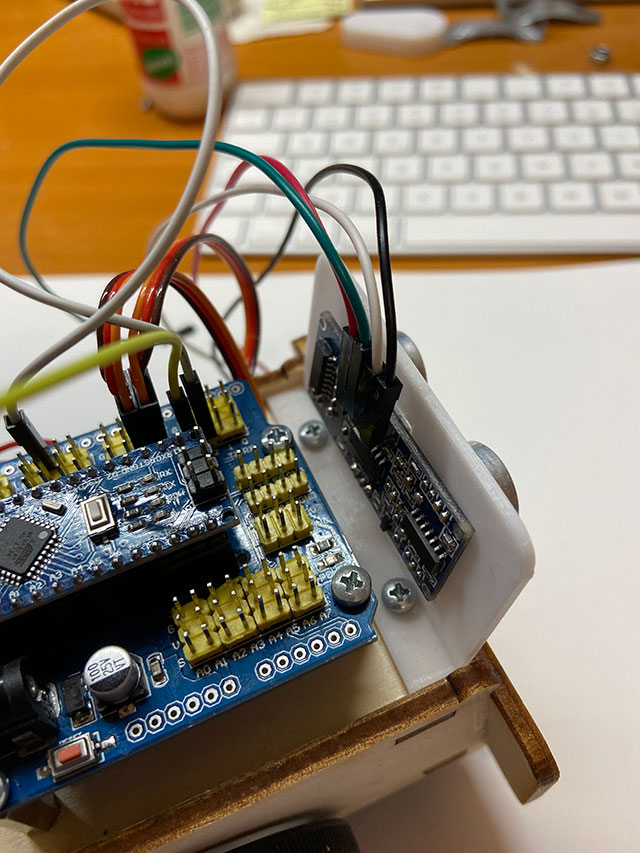
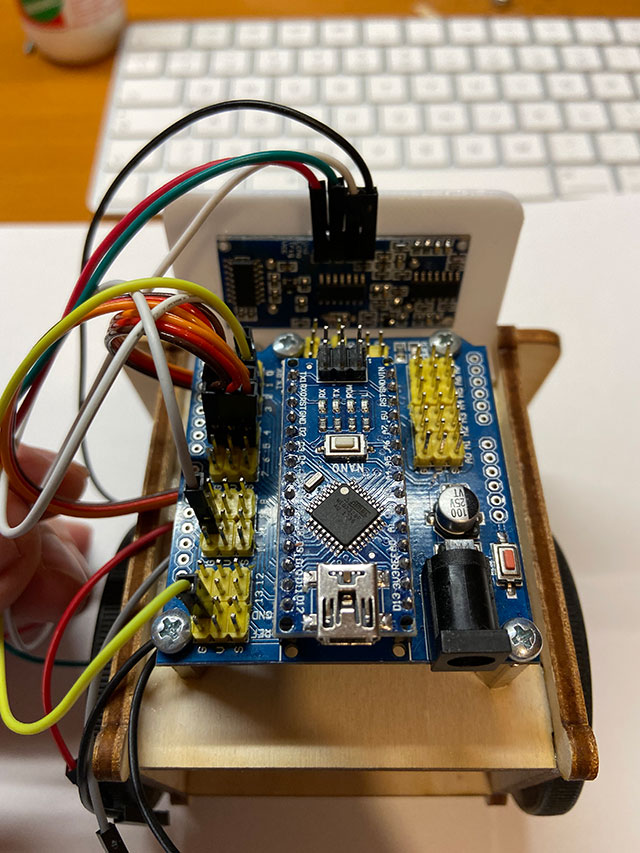
Il kit consiste in un supporto di compensato da 4 mm tagliato a laser a scuola le cui parti verranno fissate utilizzando colla vinilica. Il controllo avviene mediante un Arduino Nano connesso ad una Sensor Shield V03 che permetterà agevolmente di connettere sensori e attuatori mediante semplici jumper evitando saldature.
I motori sono costituiti da due servomotori a rotazione continua, ciò consentirà di alimentare direttamente i motori dalla scheda Arduino evitando l’aggiunto di una ponte H per controllare i motori, azione che i ragazzi svolgeranno in altre esercitazioni. Due i sensori utilizzati sul robot: sensore ad ultrasuoni e sensori IR. L’alimentazione avverrà tramite una batteria da 9V. Il controllo dei movimenti del robot potrà avvenire anche remotamente via Bluetooth con Smartphone. Due gli elementi stampati in 3D, una ball caster in cui viene inserita una biglia di vetro e un supporto per il sensore ad ultrasuoni.
Durante la prima lezione gli allievi dovranno, seguendo il video allegato, assemblare tutte le parti, ricordando prima di ogni cosa di fissare la sensoristica e l’elettronica e successivamente procedere con l’incollaggio delle varie parti di compensato della struttura.
Per poter assemblare il robot bisognerà seguire il video allegato e le fotografie che seguono in cui sono evidenziate alcune parti.
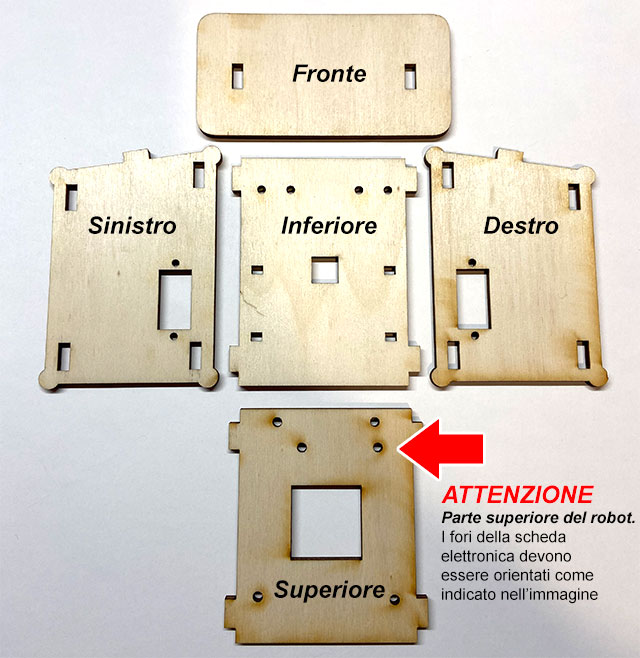
E’ importante inoltre porre attenzione alla parte superiore di compensato che ha un orientamento specifico, seguire attentamente le indicazioni del video e delle fotografie.
A questa prima lezione allego la presentazione del progetto e i sorgenti grafici (pdf) in modo che anche altri colleghi o studenti possano duplicare e migliorare l’attività.
Nelle successive lezioni verranno mostrati i collegamenti elettrici delle varie parti e proposti alcuni sketch di esempio da cui partire per aggiungere le funzionalità richieste.
Presentazione del progetto.
Titolo del progetto: SumoRobot
Simulare la progettazione e la realizzazione da parte di un’azienda di un kit robotico per l’apprendimento del Coding e della Robotica per studenti della scuola media e primi due anni delle superiori.
Il Robot deve avere caratteristiche tali da poter essere impiegato in diverse tipologie di sperimentazioni didattiche:
evita ostacoli
segui linea
comando a distanza via Smartphone
modalità gara Sumo
Il kit dovrà essere corredato da:
Titolo Azienda
Titolo del prodotto (non deve essere quello dell’attività di PCTO) corredato da logo
Brochoure pubblicitaria
Manuale di istruzioni per il montaggio composto da: lista materiali e componenti, fasi di montaggio, il tutto arricchito con immagini e disegni tecnici
Manuale introduttivo alla programmazione con Arduino indirizzata alla programmazione del robot
Lista di sketch di esempi commentati e funzionanti da allegare al kit
Slide di presentazione del progetto
Sito internet di riferimento in cui raccogliere tutta la documentazione per il cliente
Note
Tutta la documentazione dovrà essere prodotta in lingua italiana ed inglese.
Il sito internet dovrà essere realizzato con Google Site e sarà visibile solo mediante account personale dello studente al gruppo di lavoro e ai docenti del Consiglio di Classe
Il diario di bordo dovrà essere prodotto con Google Documenti e dovrà collezionare l’attività svolta durante ogni giornata di lavoro
Nel diario di bordo bisognerà includere una sezione di “considerazioni personali” espresse da ogni singolo studente sull’attività svolta ed eventuali suggerimenti per il miglioramento del progetto.
La presentazione del prodotto dovrà essere realizzata con Google Presentazioni
Ogni fase costruttiva dovrà essere documentata in modo fotografico e con brevi video
Lista componenti
Sensore ultrasuoni HC-SR04
Sensor Shield per Arduino Uno Nano V3
Servomotori a rotazione continua 360° – FS90R con ruote
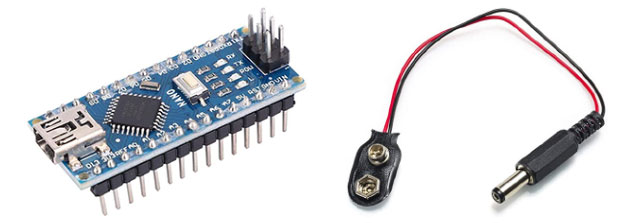
Cavo di Alimentazione 9V con cavo jack maschio 2.1 X 5.5 mm
Batteria 9V
Jumper Femmina-Femmina
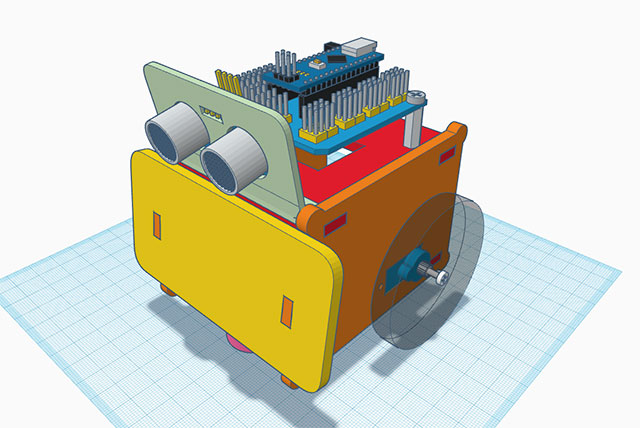
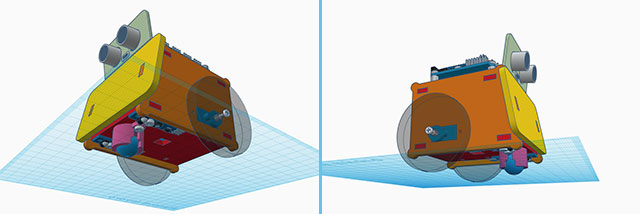
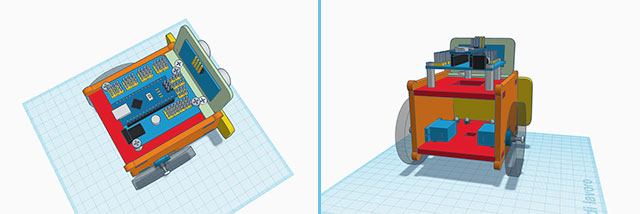
Orientamento delle varie parti della struttura del robot
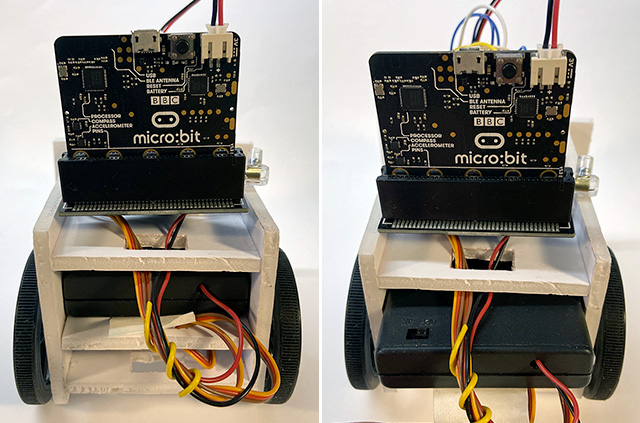
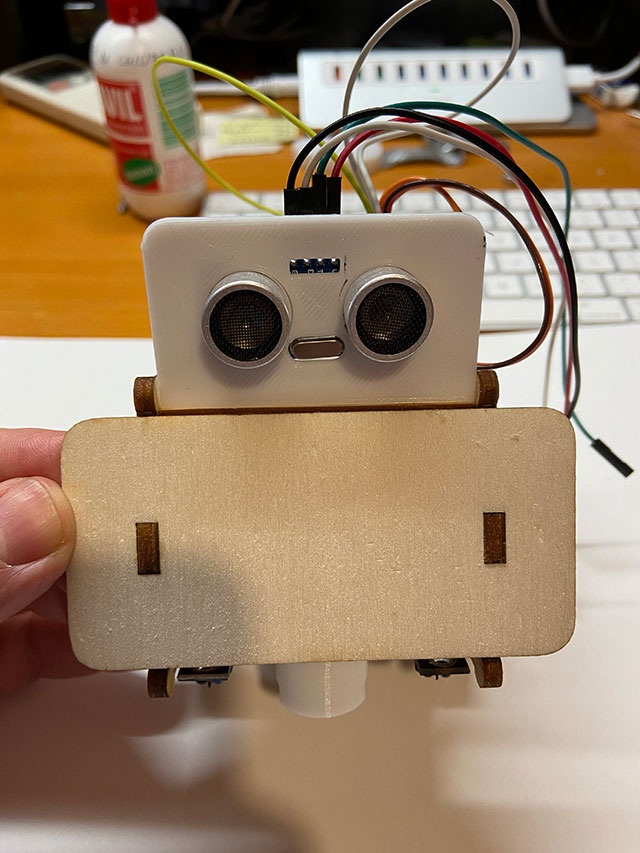
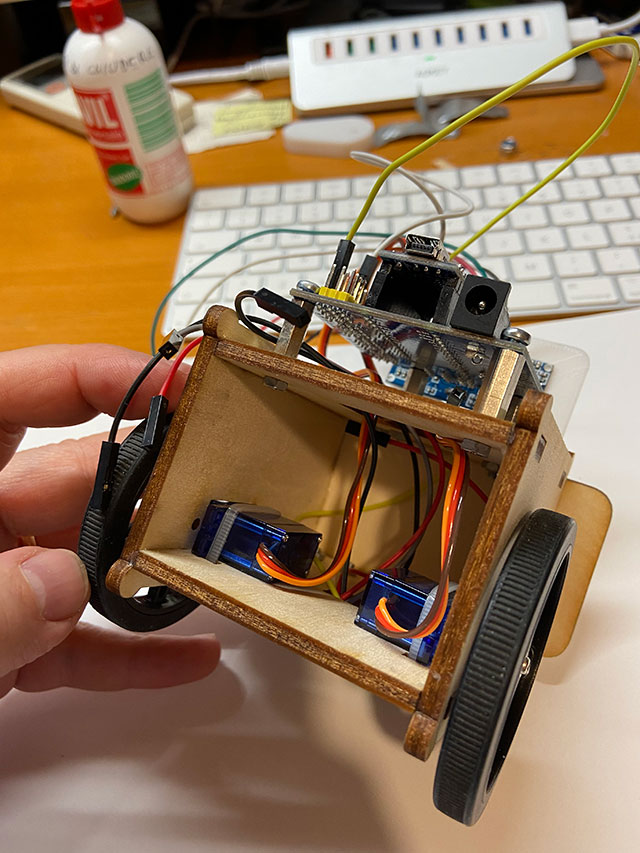
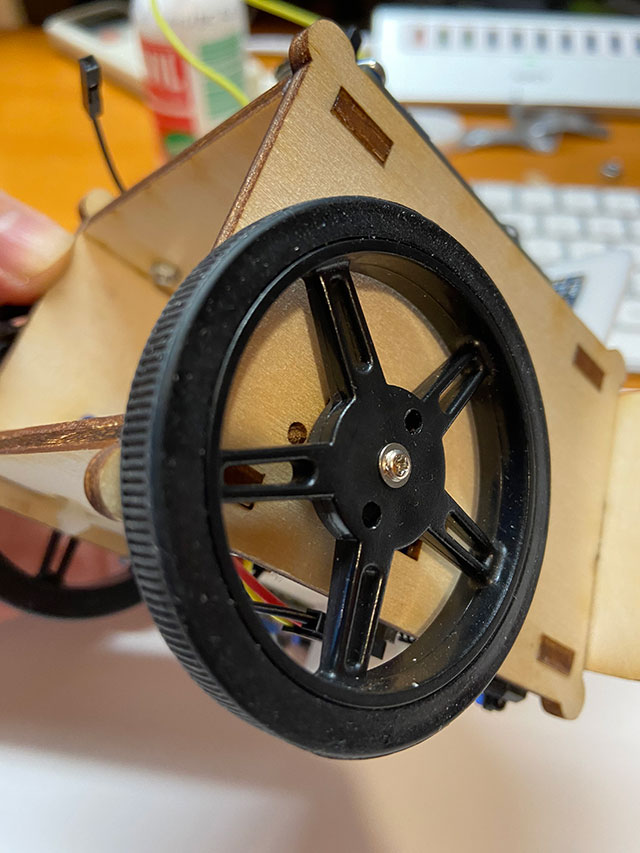
Vista frontale del robot
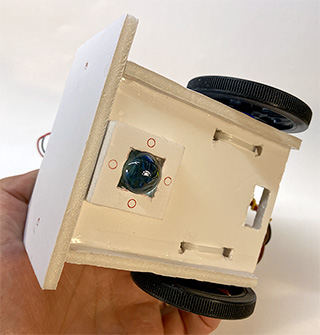
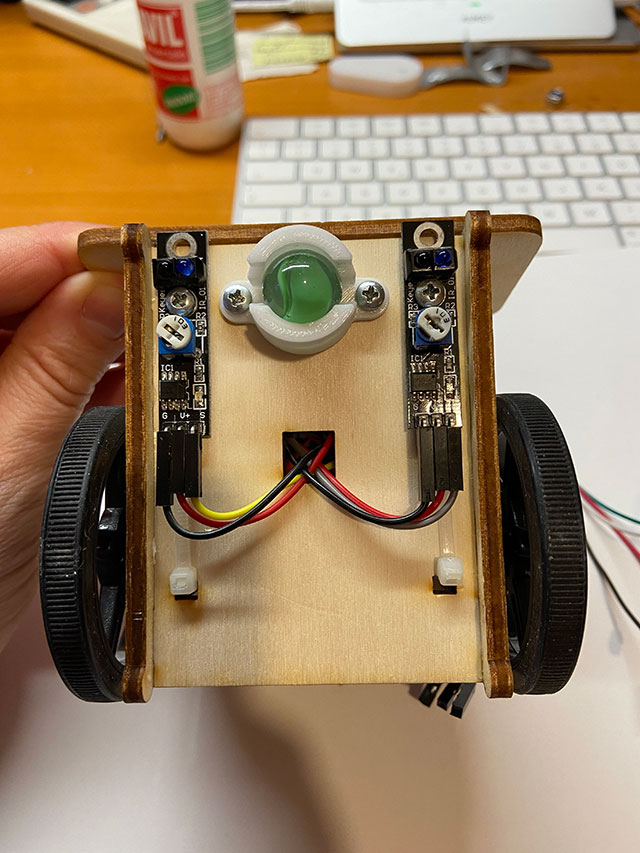
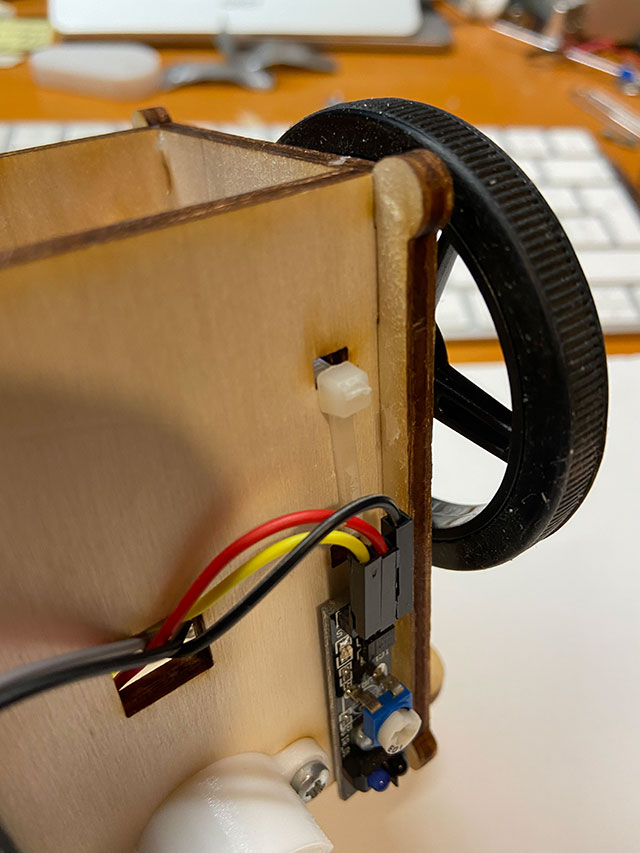
Vista dal basso del robot, si notano i due sensori IR fissati con vite M3 da 12 mm
Blocco supporto sensore ultrasuoni mediante due viti M3 da 12 mm
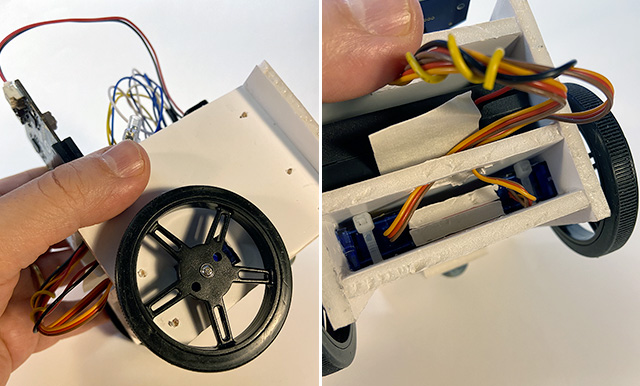
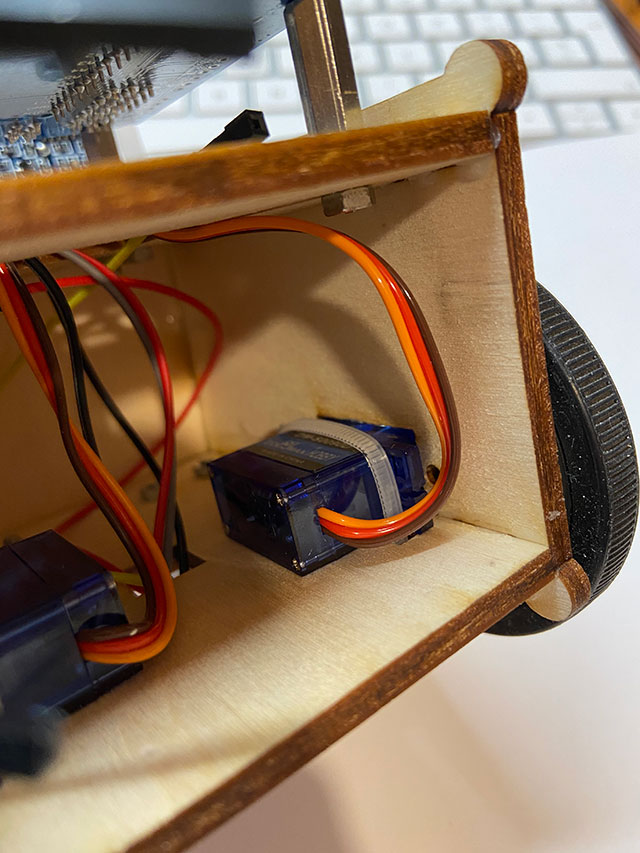
I servomotori sono fissati alla struttura mediante due fascette stringicavo. Seguire l’orientamento dei servomotori così come indicato nelle immagini che seguono, i cavi di uscita dei servomotori devono essere rivolti verso l’esterno
Nell’immagine si nota in quali fessure far passare la fascetta stringicavo
La chiusura della fascetta deve avvenire nella parte inferiore del robot mantenendo il nodo di chiusura così come indicato nell’immagine
Le ruote vanno fissate al mozzo del motore mediante apposita vite
La scheda Sensor Shield V03 va fissata ai giunti esagonali mediante vite M3 da 10 mm
Nella prossima lezione vedremo come collegare le varie parti elettroniche ed inizieremo con la programmazione del robot.
“5 minuti da Maker” è orami un’abitudine che ho da qualche tempo: progettare in 5 minuti un oggetto o una soluzione e realizzarla. Alcune volte realizzarla mi richiede un po’ più di 5 minuti, ma cerco di non superare in tutto 60 minuti. E’ un’esercizio che mi sono imposto settimanalmente, un po’ come svago un po’ per dar sfogo ad idee nascenti che potrebbero diventare qualcosa di più importante.
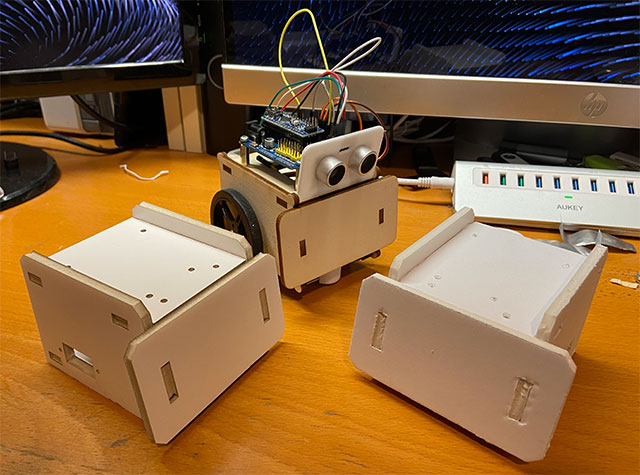
Questa volta l’esercizio consiste nel rendere ancora più semplice la realizzazione del SumoBot, picco robot realizzato in compensato, trasformandolo in una versione realizzata con un materiale ancora più semplice da manipolare per gli studenti più giovani, il Foam Core, (per saperne di più continua la lettura 😉 ).
Durante una delle tante attività di PCTO feci realizzare ai miei studenti di 3′ automazione un il piccolo SumoBot su una base di compensato da 3mm, l’attività consisteva nel montare la struttura, l’elettronica e programmare i robot affinchè potessero gareggiare. Il tutto era stato realizzato con schede Arduino UNO R3 e anche con degli Arduino micro, due micro servo SG90 a rotazione continua ed un sensore ad ultrasuoni. Alcuni aggiunsero al robot una scheda Bluetooth per poter pilotare il robot anche via smartphone. Fu un’attività divertentissima che voglio riproporre ai ragazzi.
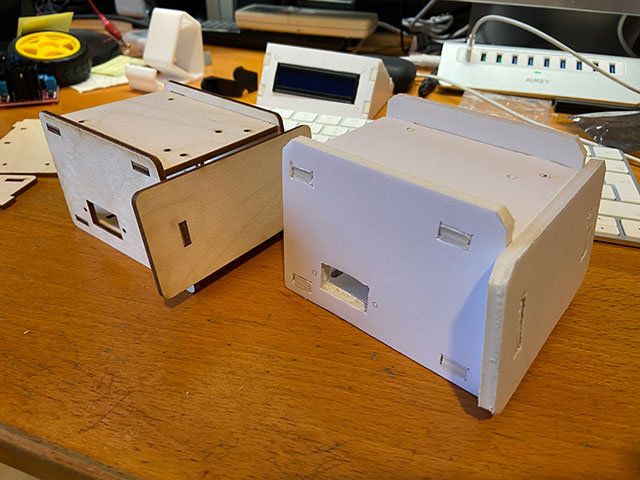
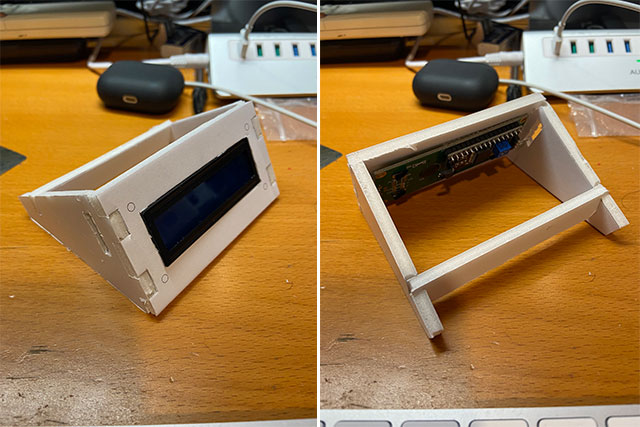
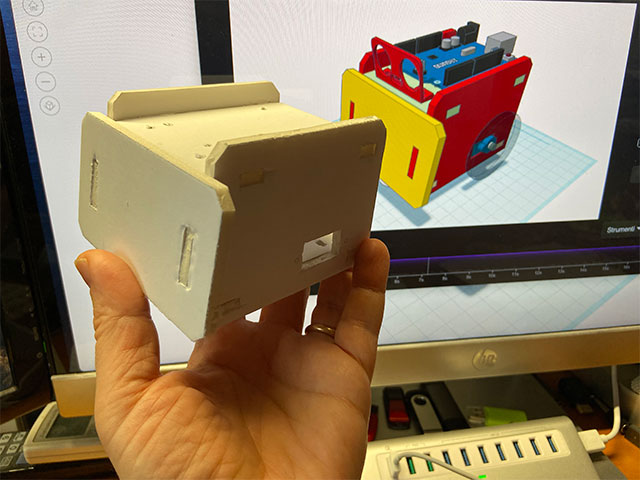
Nel riprendere in mano il progetto ho pensato di realizzare una versione della struttura in Foam Core, un materiale utilizzato dagli architetti per costruire plastici di abitazioni. Si tratta di uno strato di spugna racchiuso da due fogli di cartoncino. Viene venduto in fogli di diverso spessore e dimensione, attualmente sto utilizzando fogli A3 di spessore 5mm. Le strutture che se ne ricavano sono sufficientemente solide. Utilizzo questo materiale quando voglio prototipare rapidamente oggetti per le mie sperimentazioni, come quello che vedete nell’immagine che segue, un supporto per un display 16×2.
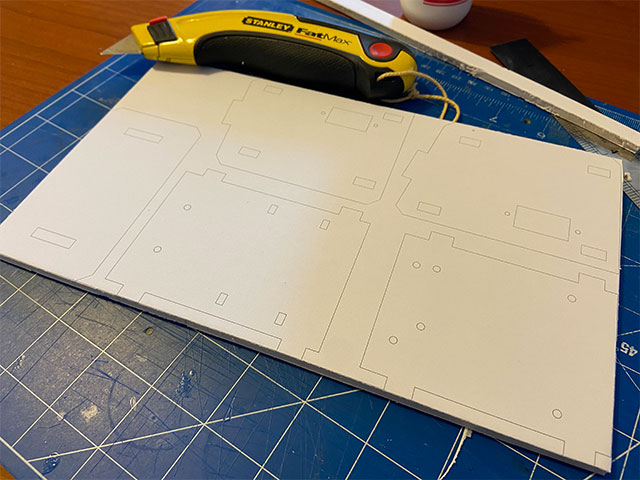
In genere stampo su fogli adesivi bianchi A4 la struttura che voglio realizzare, dispongo i fogli adesivi sul Foam Core e con un cutter ne ritaglio il profilo. Tutti gli elementi poi vengono incastrati e incollati con normalissima colla vinilica.
Con il Foam Core ho provato a realizzare una serie di piccoli robot e sono rimasto più che soddisfatto.
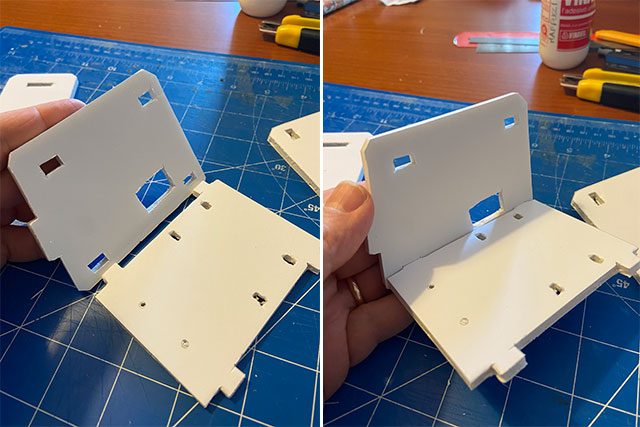
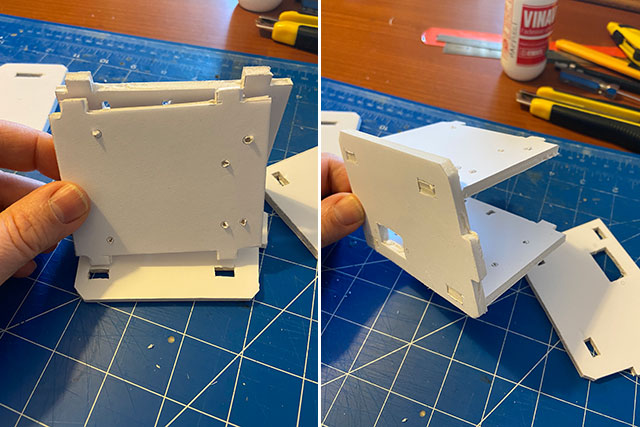
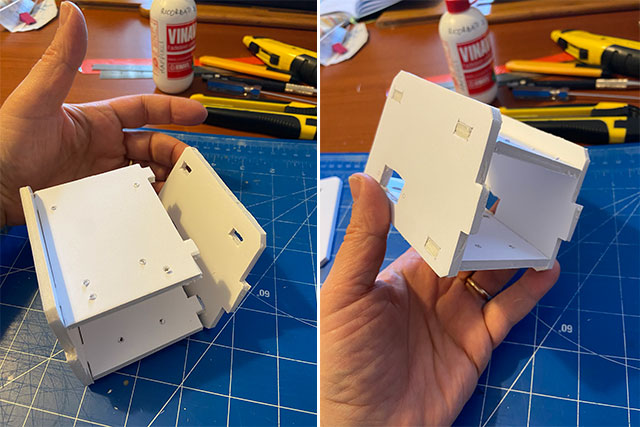
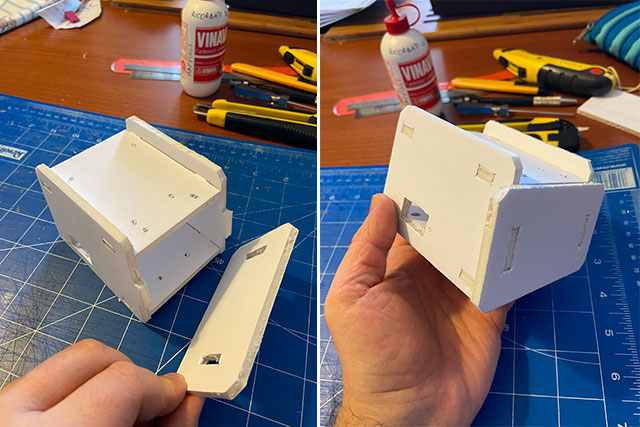
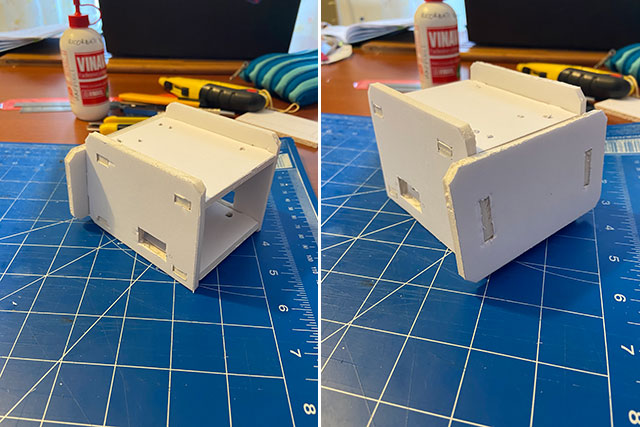
Di seguito la sequenza fotografica delle fasi di montaggio, il taglio degli elementi non è perfetto, con un po’ più tempo e pazienza si può fare molto meglio.
Tra qualche giorno, quando terminerò di effettuare le ultime prove sul SumoFoam renderò pubblico il file pdf.
Stampo su foglio adesivo bianco il profilo del robot ed incollo su Foam Core.
Si nota la struttura a sandwich del pannello: cartoncino – materiale spugnoso – cartoncino
Oltre ad incastrare i vari elementi ho utilizzato della colla vinilica.
Prossimamente il montaggio dell’elettronica da parte dei miei studenti.