
Lavoro di PCTO a.s. 2020-2021. Anno scolastico difficile, la pandemia non aiuta assolutamente nello sviluppo di attività laboratoriali a scuola e in azienda e a tal proposito ho pensato di rivedere completamente il laboratorio iniziando dalle attività di laboratorio degli studenti del 3′ anno.
Come molti colleghi e studenti sapranno il PCTO (ex alternanza scuola lavoro) svolto al terzo anno consiste nello svolgimento di un’attività che viene integralmente realizzata a scuola in cui viene svolta una simulazione d’impresa, dalla progettazione alla creazione di un prodotto, ma il periodo è complicato e lo svolgimento delle attività avverrà in parte online ed in parte in presenza, online si effettueranno tutte le operazioni progettuali e di documentazione mentre in presenza si assemblerà l’oggetto che dovrà poi essere reso prodotto. Come per gli anni passati per le classi terze propongo un’attività basata su un kit da me progettato che i ragazzi poi dovranno modificare e migliorare sia dal punto di vista meccanico che dal punto di vista elettronico e informatico. Parto da un prodotto progettato in partenza semplicemente perché i tempi, i costi ed il periodo non permettono una progettazione da zero, ma come accade ogni anno molti ragazzi a fine attività rivedono integralmente il progetto riformulando una nuova proposta.
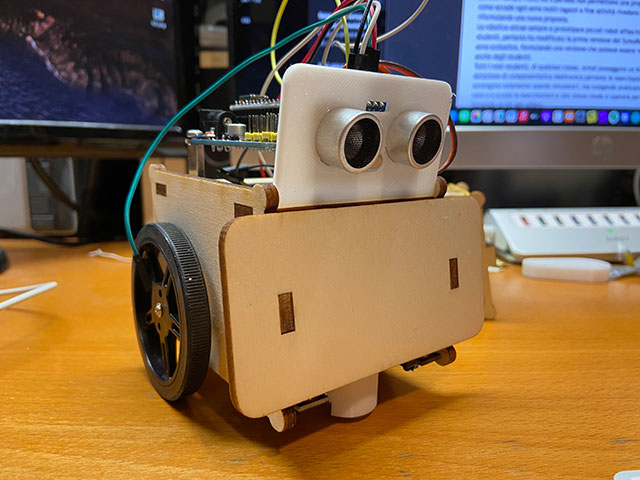
La robotica attrae sempre e prototipare piccoli robot affascina sempre i giovani studenti, pertanto ho modificato la prima versione del SumoRobot disegnato nello scorso anno scolastico, formulando una versione che potesse essere realizzata con semplicità e a costi molto bassi.
Tutti i miei studenti, di qualsiasi classe, ormai posseggono un kit Arduino con una buona dotazione di componentistica elettronica, pertanto le esercitazioni in DaD non avvengono solamente usando simulatori, ma svolgendo praticamente loro a casa ed io a casa o a scuola le esercitazioni e allo stesso modo si opererà per l’attività di PCTO, fornendo un kit agli allievi.
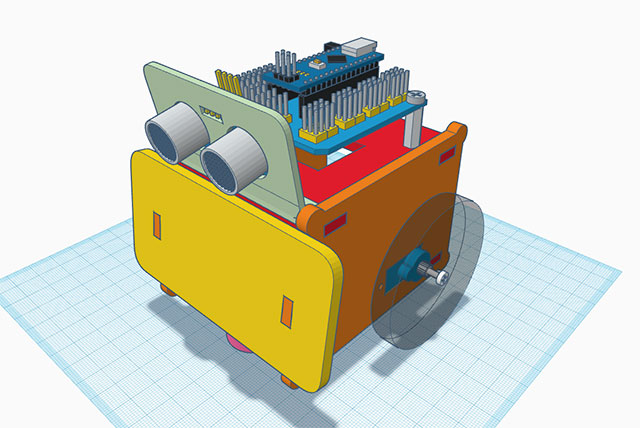
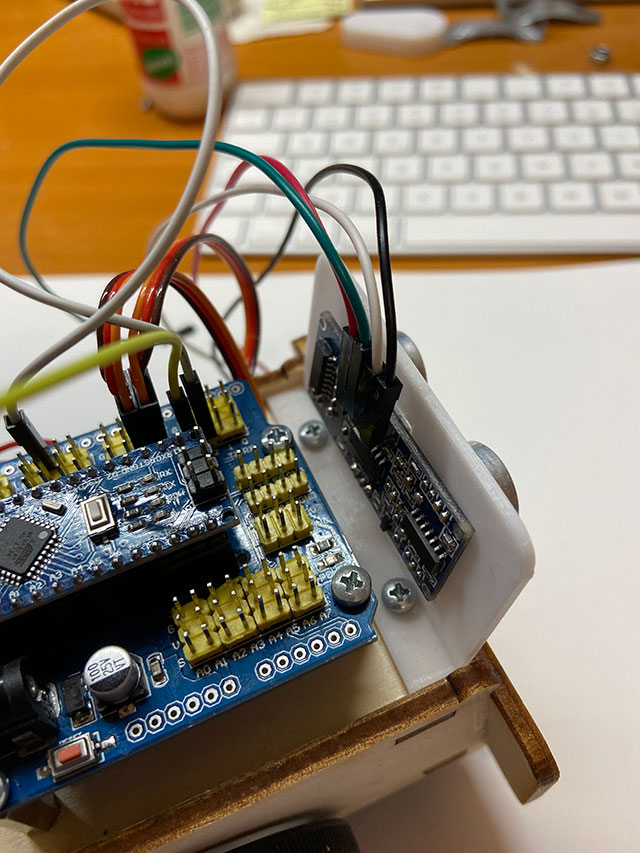
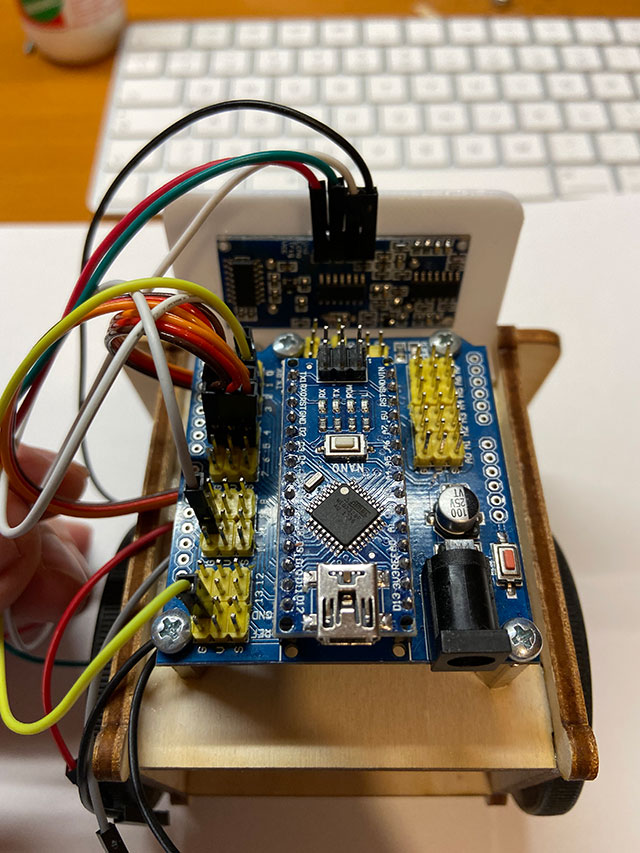
Il kit consiste in un supporto di compensato da 4 mm tagliato a laser a scuola le cui parti verranno fissate utilizzando colla vinilica. Il controllo avviene mediante un Arduino Nano connesso ad una Sensor Shield V03 che permetterà agevolmente di connettere sensori e attuatori mediante semplici jumper evitando saldature.
I motori sono costituiti da due servomotori a rotazione continua, ciò consentirà di alimentare direttamente i motori dalla scheda Arduino evitando l’aggiunto di una ponte H per controllare i motori, azione che i ragazzi svolgeranno in altre esercitazioni. Due i sensori utilizzati sul robot: sensore ad ultrasuoni e sensori IR. L’alimentazione avverrà tramite una batteria da 9V. Il controllo dei movimenti del robot potrà avvenire anche remotamente via Bluetooth con Smartphone. Due gli elementi stampati in 3D, una ball caster in cui viene inserita una biglia di vetro e un supporto per il sensore ad ultrasuoni.
Durante la prima lezione gli allievi dovranno, seguendo il video allegato, assemblare tutte le parti, ricordando prima di ogni cosa di fissare la sensoristica e l’elettronica e successivamente procedere con l’incollaggio delle varie parti di compensato della struttura.
Per poter assemblare il robot bisognerà seguire il video allegato e le fotografie che seguono in cui sono evidenziate alcune parti.
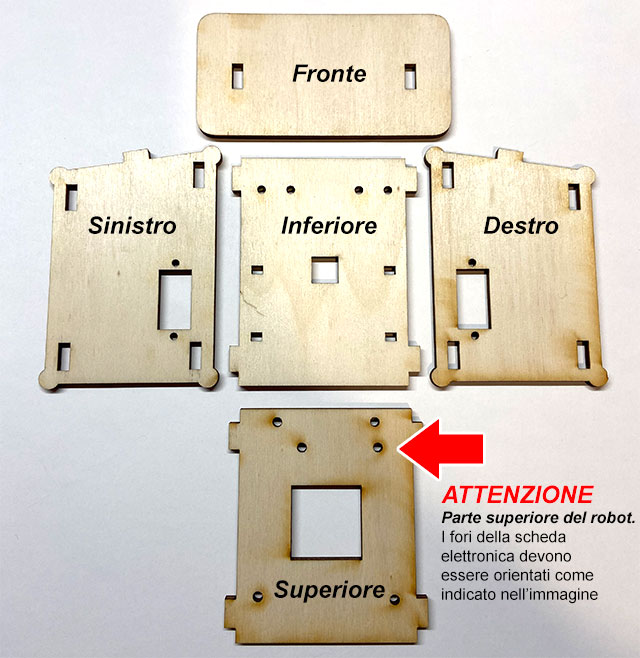
E’ importante inoltre porre attenzione alla parte superiore di compensato che ha un orientamento specifico, seguire attentamente le indicazioni del video e delle fotografie.
A questa prima lezione allego la presentazione del progetto e i sorgenti grafici (pdf) in modo che anche altri colleghi o studenti possano duplicare e migliorare l’attività.
Nelle successive lezioni verranno mostrati i collegamenti elettrici delle varie parti e proposti alcuni sketch di esempio da cui partire per aggiungere le funzionalità richieste.
Presentazione del progetto.
Titolo del progetto: SumoRobot
Simulare la progettazione e la realizzazione da parte di un’azienda di un kit robotico per l’apprendimento del Coding e della Robotica per studenti della scuola media e primi due anni delle superiori.
Il Robot deve avere caratteristiche tali da poter essere impiegato in diverse tipologie di sperimentazioni didattiche:
- evita ostacoli
- segui linea
- comando a distanza via Smartphone
- modalità gara Sumo
Il kit dovrà essere corredato da:
- Titolo Azienda
- Titolo del prodotto (non deve essere quello dell’attività di PCTO) corredato da logo
- Brochoure pubblicitaria
- Manuale di istruzioni per il montaggio composto da: lista materiali e componenti, fasi di montaggio, il tutto arricchito con immagini e disegni tecnici
- Manuale introduttivo alla programmazione con Arduino indirizzata alla programmazione del robot
- Lista di sketch di esempi commentati e funzionanti da allegare al kit
- Slide di presentazione del progetto
- Sito internet di riferimento in cui raccogliere tutta la documentazione per il cliente
Note
- Tutta la documentazione dovrà essere prodotta in lingua italiana ed inglese.
- Il sito internet dovrà essere realizzato con Google Site e sarà visibile solo mediante account personale dello studente al gruppo di lavoro e ai docenti del Consiglio di Classe
- Il diario di bordo dovrà essere prodotto con Google Documenti e dovrà collezionare l’attività svolta durante ogni giornata di lavoro
- Nel diario di bordo bisognerà includere una sezione di “considerazioni personali” espresse da ogni singolo studente sull’attività svolta ed eventuali suggerimenti per il miglioramento del progetto.
- La presentazione del prodotto dovrà essere realizzata con Google Presentazioni
- Ogni fase costruttiva dovrà essere documentata in modo fotografico e con brevi video
Lista componenti
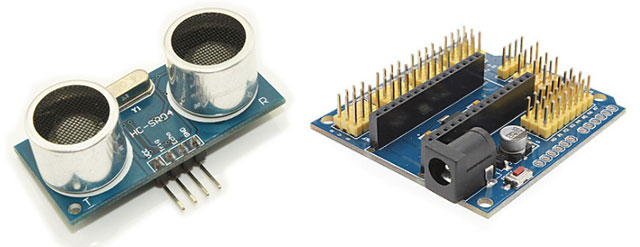
- Sensore ultrasuoni HC-SR04
- Sensor Shield per Arduino Uno Nano V3
- Servomotori a rotazione continua 360° – FS90R con ruote
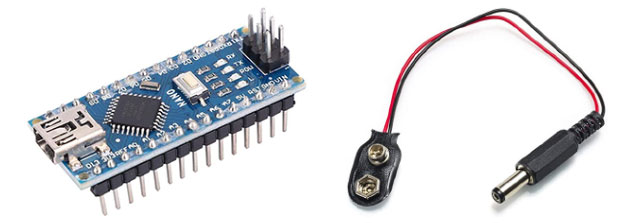
- Arduino Nano (originale o compatibile) nella versione compatibile che utilizza un convertitore da USB a Seriale tipo CH340G è indispensabile installare un driver specifico
- Cavo di Alimentazione 9V con cavo jack maschio 2.1 X 5.5 mm
- Batteria 9V
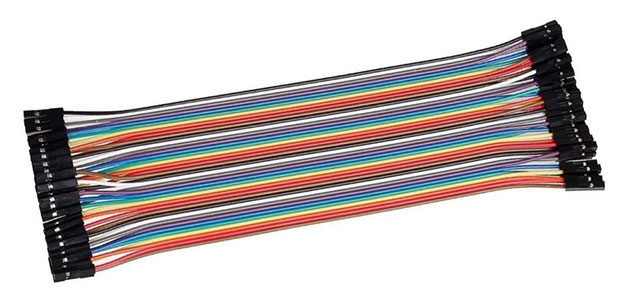
- Jumper Femmina-Femmina

Orientamento delle varie parti della struttura del robot
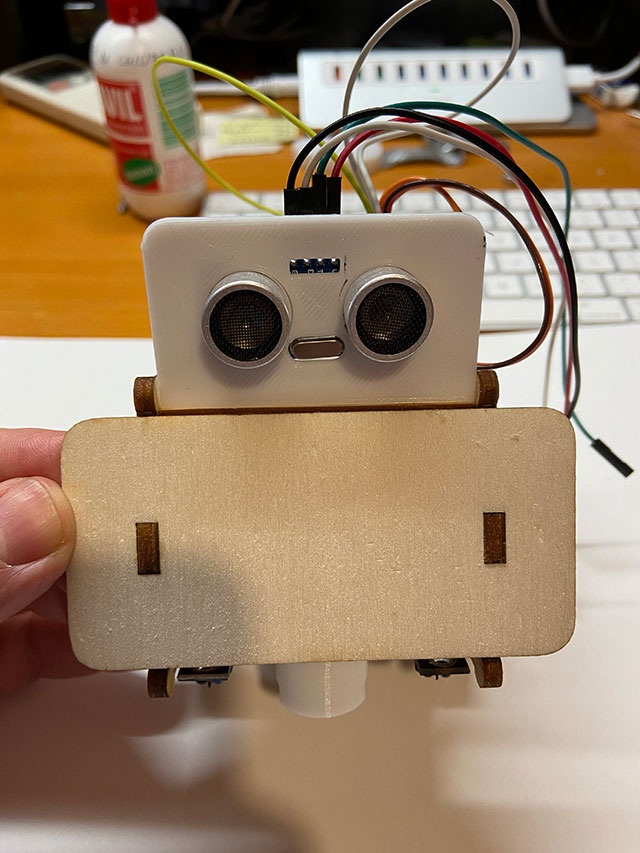
Vista frontale del robot
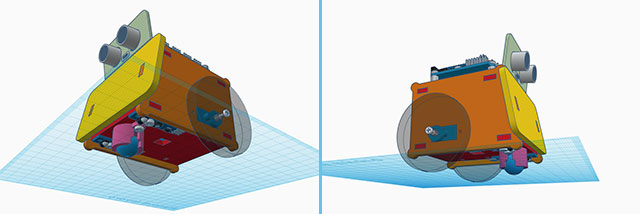
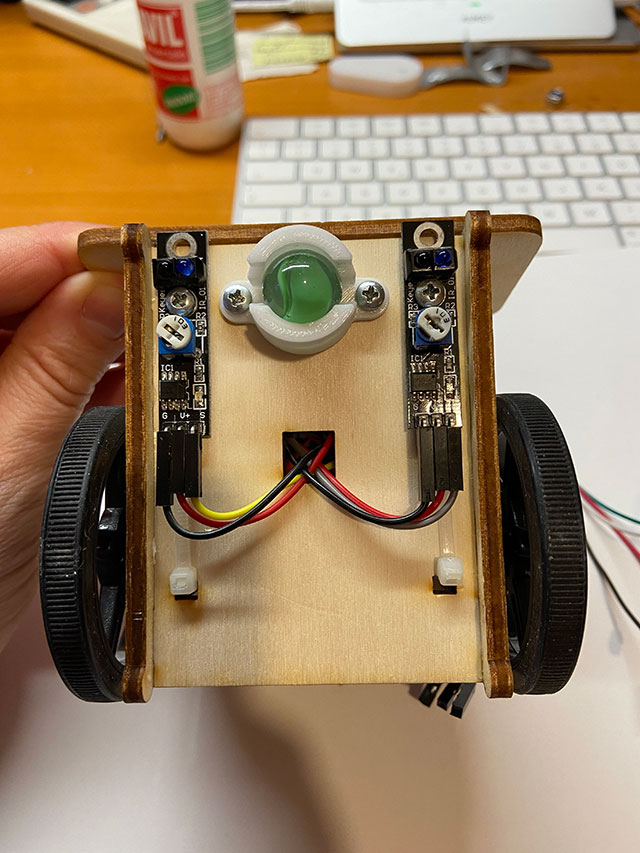
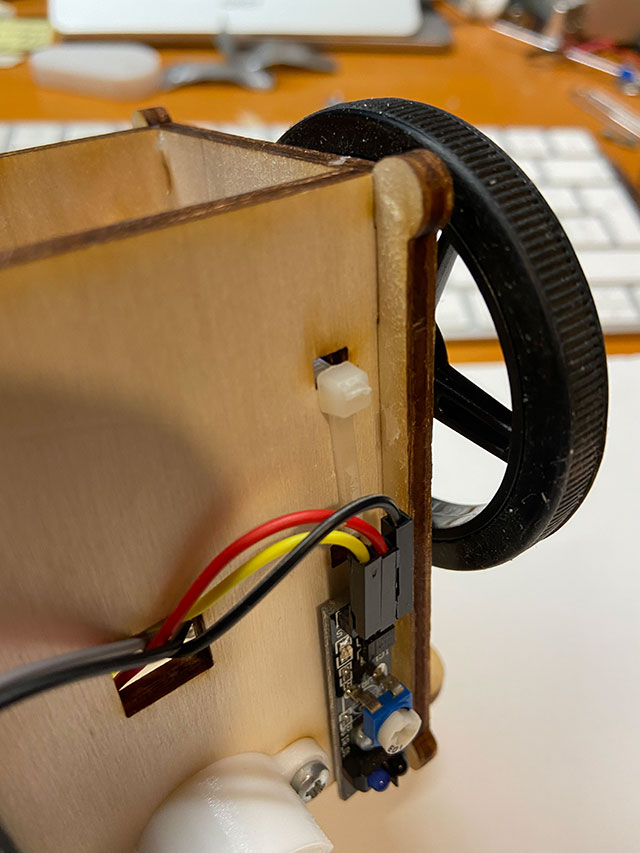
Vista dal basso del robot, si notano i due sensori IR fissati con vite M3 da 12 mm
Blocco supporto sensore ultrasuoni mediante due viti M3 da 12 mm
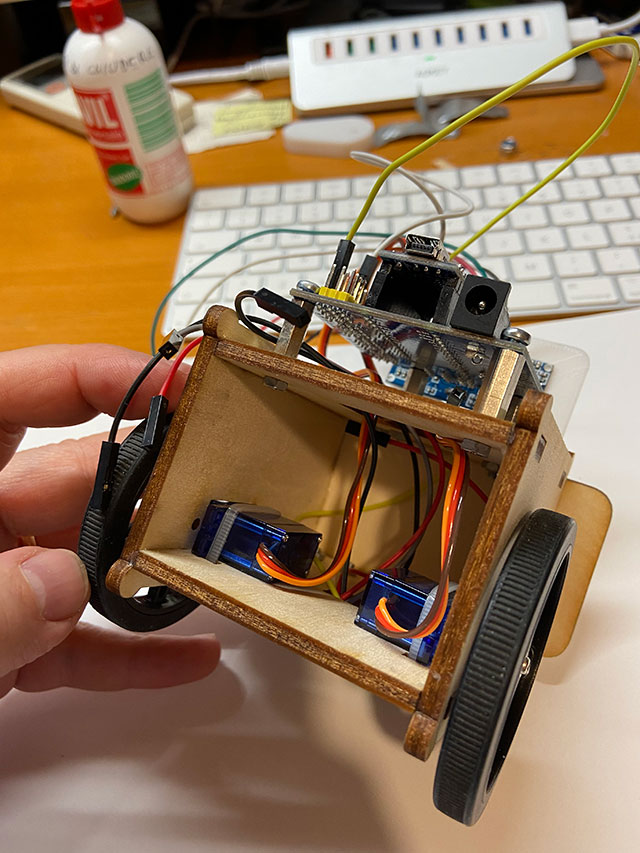
I servomotori sono fissati alla struttura mediante due fascette stringicavo. Seguire l’orientamento dei servomotori così come indicato nelle immagini che seguono, i cavi di uscita dei servomotori devono essere rivolti verso l’esterno
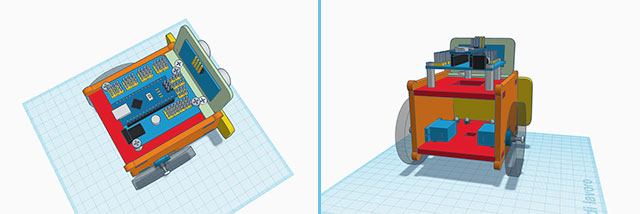
Nell’immagine si nota in quali fessure far passare la fascetta stringicavo
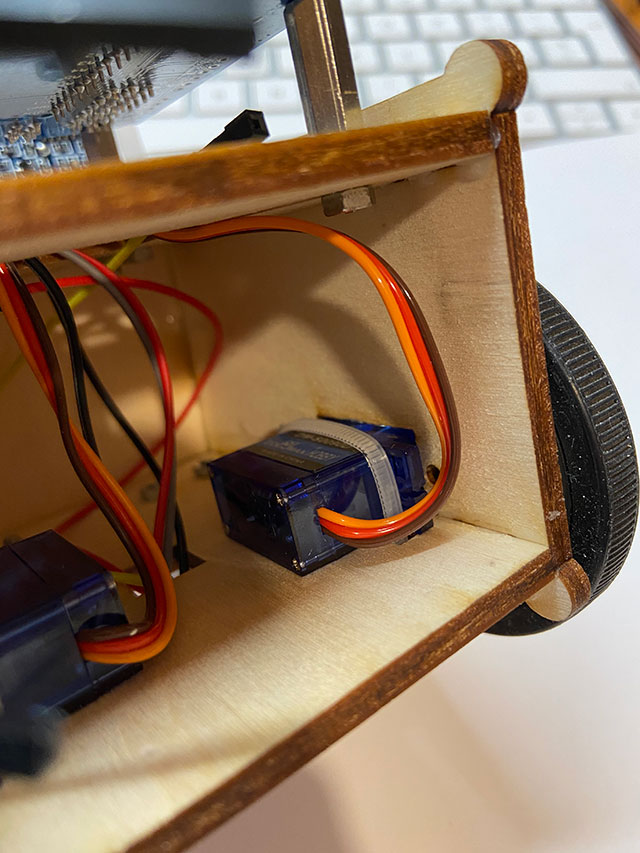
La chiusura della fascetta deve avvenire nella parte inferiore del robot mantenendo il nodo di chiusura così come indicato nell’immagine
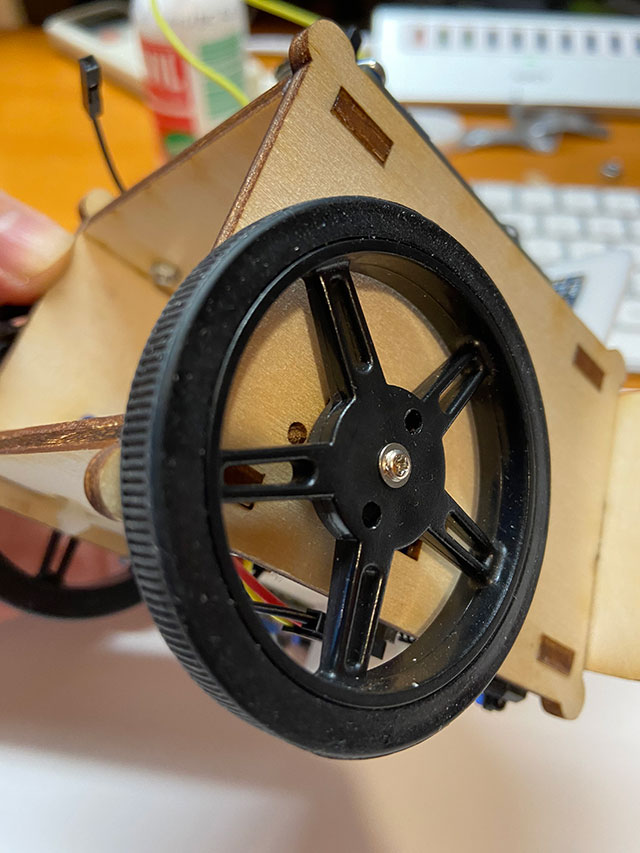
Le ruote vanno fissate al mozzo del motore mediante apposita vite
La scheda Sensor Shield V03 va fissata ai giunti esagonali mediante vite M3 da 10 mm
Nella prossima lezione vedremo come collegare le varie parti elettroniche ed inizieremo con la programmazione del robot.
Buon Making a tutti 🙂