E’ fantastico come i figli, ma anche gli allievi ti diano motivo di studio e spesso questa azione è giustificata da un deficit dovuto ad una carenza del nostro sistema scuola che va ad una velocità certamente inferiore a quanto svolto in altri stati europei. E’ interessante ad esempio come “l’onda del coding” in Italia sia giunto circa una paio di anni dopo agli Stati Uniti e all’Inghilterra, ora il motto è: “W la programmazione” 🙂 basta pensare ad esempio a quello che sta succedendo con micro::bit (che avrò la fortuna di usare nelle prossime settimane) nella scuola inglese cosa credo “fantascientifica” da noi, ma in ogni caso nulla di male, l’importante è agire per i nostri allievi e cercare sistemi di innovazione didattica che possano più agevolmente inserirli nel mondo del lavoro. Come genitore spessissimo cerco di “raffinare” quanto già svolto dai miei figli a scuole e come ogni genitori cerco di aggiungere elementi, a mio avviso essenziali, che per carenze “strutturali” non vengono svolte a scuola.
Mi capita molto spesso di confrontarmi con amici genitori che chiedono i consigli più disparati: il miglior Istituto in cui iscrivere il figlio, il miglior indirizzo di studio o ancora lamentele o elogi sul tal collega o su un metodo didattico, insomma mi sento un po’ il parafulmine della situazione e caricato di responsabilità in quanto parliamo del futuro di bambini e ragazzi, ma in ogni caso anche se faticoso, il confronto è utile e permette di migliorarti, è bello poi quando ricevi mail come quella di Francesco Lacchia, che con il suo contributo attivo cerca di donare ai propri figli, ma anche ad altri qualcosa di più.
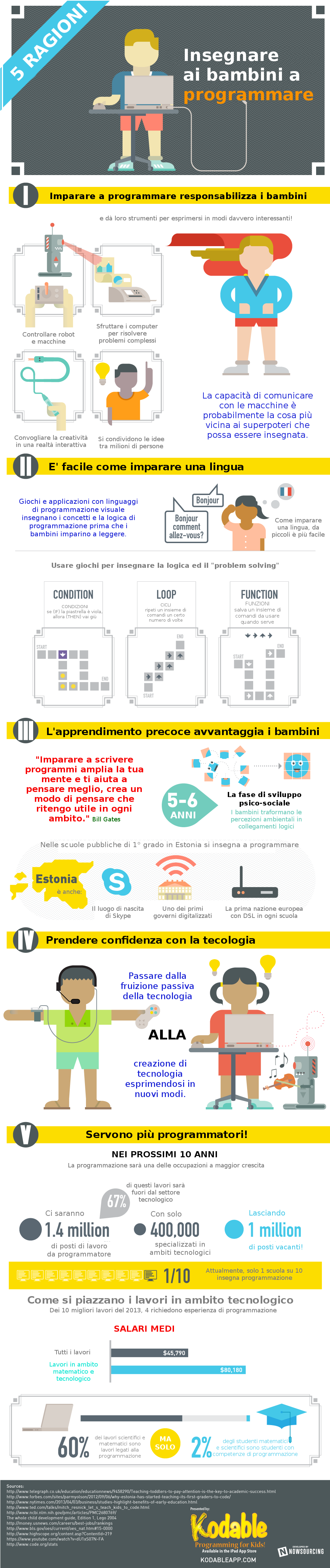
Questa la sua e-mail in merito all’articolo “Insegnare ai bambini a programmare“:
Mi sto documentando per insegnare un po’ di programmazione ai miei bambini (8-10 anni).
In merito al tuo articolo in oggetto, ho tradotto l’info-grafica in allegato. Se vuoi inserirla nel tuo articolo per chi non ha dimestichezza con l’inglese… e forse proprio chi avrebbe bisogno di essere edotto su questi temi, spesso è anche a digiuno di inglese.
Purtroppo vedo che anche molto del materiale interattivo che si trova on-line arriva da oltreoceano e non ha versioni in italiano. Questo è un po’ un limite per i bambini italiani. Infatti mi piacerebbe creare un sito per insegnare questi temi ai bambini… ma è solo un’idea embrionale… si vedrà. Intanto quest’estate metterò sotto Sara e Andro come cavie 🙂
Ciao e grazie per tutto il tuo materiale, le idee che fornisci ed induci!
Francesco
Un sincero grazie a Francesco.
Questa l’infografica (un click sull’immagine sul link o sull’immagine per aprire la versione completa).