La maniera migliore per applicare quanto si è appreso con Arduino è quella di realizzare un robot, in quanto in esso sono racchiuse moltissime delle funzionalità di cui avrete necessità per i vostri progetti futuri.
Se siete utenti esperti nell’uso di Arduino potrete ritrovare in questo breve corso iniziale concetti già conosciuti, ma per mia scelta desidero affrontare ogni passo in modo graduale, anche a costo di ripetere argomenti già conosciuti, in questo modo si avrà modo di perfezionare il proprio apprendimento e rivedere concetti di base anche da altri punti di vista.
Quindi i prerequisiti necessari sono quelli che avete ottenuto leggendo le mie prime quattro lezioni delle mie slide pubbliche oppure aver eseguito le lezioni su questo sito.
Questa lezione ha una durata di circa 4/5 ore in aula per utenti che hanno una conoscenza di base e quindi è da intendersi di primo livello nell’uso di Arduino e vuole essere un percorso alternativo per apprendere in maniera più coinvolgente (almeno spero) l’uso di Arduino, ponendo le basi per un percorso di robotica con Arduino di livelli via via crescenti.
All’interno di questa lezione troverete link a istruzioni e spiegazioni in modo che questa lezione possa essere un’ulteriore punto di accesso al mondo Arduino.
Faremo un piccolo passo in dietro ripetendo alcuni concetti di base e poi un balzo in avanti per imparare nuovi argomenti utilizzando le competenze ottenute nelle lezioni che avete fino a questo punto studiato, tutto in maniera graduale senza dare nulla per scontato.
Come sempre la mia speranza è che questa lezione possa essere utilizzata come approccio iniziale all’insegnamento dell’informatica e dell’elettronica.
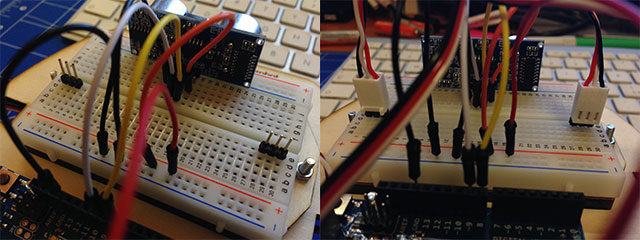
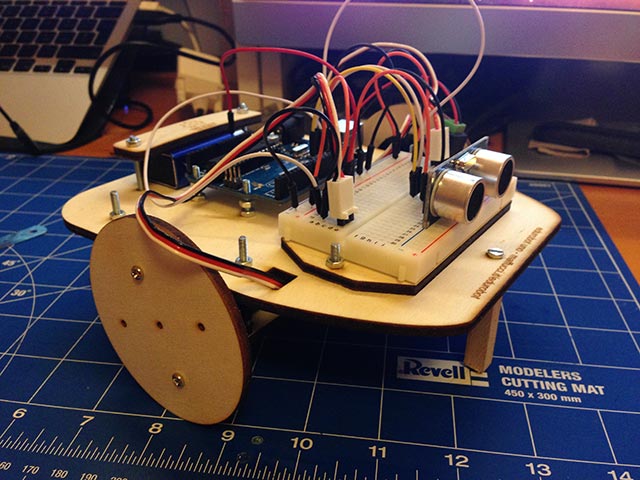
Per rendere più agevole lo sviluppo dei propri progetti, ho realizzato una struttura in compensato su cui sono fissate: scheda Arduino UNO R3 e Breadboard. Una piccola stazione di lavoro, facilmente trasportabile, che si trasforma poi successivamente in un piccolo robot, il kit sviluppato ha il nome di EduRobot UNO, ad esso ho associato un’area sul mio sito, www.maffucci.it/edurobot ed un sito di riferimento che rimanda per ora alla medesima pagina: www.edurobot.cc, su cui inserirò i sorgenti grafici per realizzare la struttura, ma anche i primi sketch di programmazione con esercizi. L’idea quindi è quella di andare oltre e costruire una didattica della robotica con Arduino.
Il nome scelto non è casuale: EduRobot UNO
- EduRobot perché il desiderio e che sia utilizzato per imparare;
- UNO perché è il primo della famiglia, ad esso si sta aggiungendo il fratello maggiore EduRobot DUE costituito da una struttura più elaborata che consentirà di realizzare progetti più complessi, ma che potrà utilizzare fin da subito elementi già usati per la versione UNO.
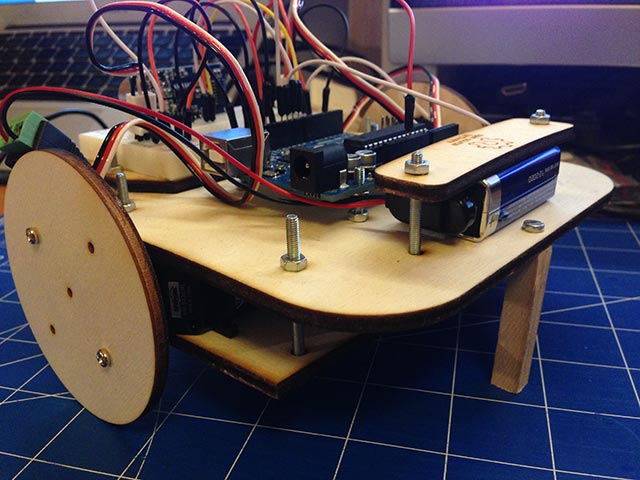
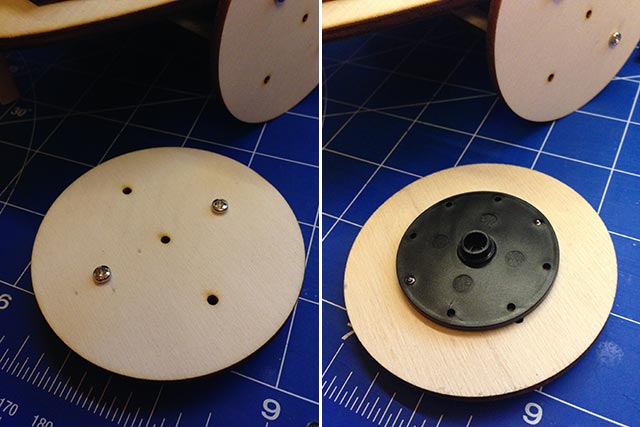
Tutte le strutture robotiche che sto progettando sono pensate per non fare uso di collanti e quindi adatte per essere usate anche con giovani studenti, tutto compensato tagliato a laser, viti e bulloni, nulla di più, se poi desiderate, potrete voi apportare le migliorie direttamente su quanto da me proposto.
E quindi non posso che augurarvi: buona sperimentazione! 🙂
Descritto l’idea di progetto partiamo con la classica lista dei componenti usati.
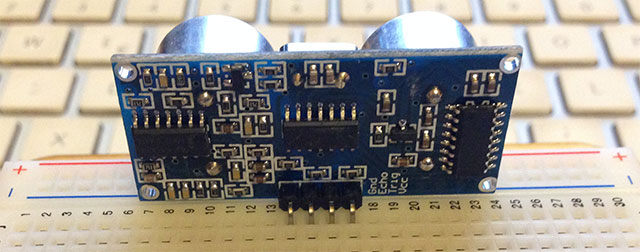
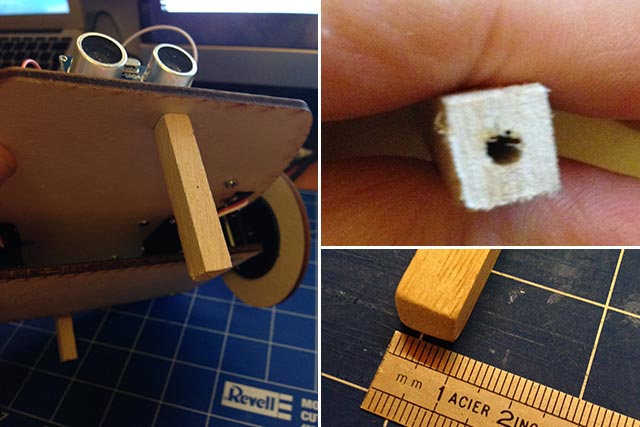
Se avete già acquistato un Arduino Starter Kit a questo dovrete aggiungere un paio di servomotori a rotazione continua (360°) ed un sensore ad ultrasuoni, ma se state seguendo uno dei miei corsi nessun problema, questi dispositivi fanno parte della dotazione che utilizzo per insegnare.
Continua a leggere→


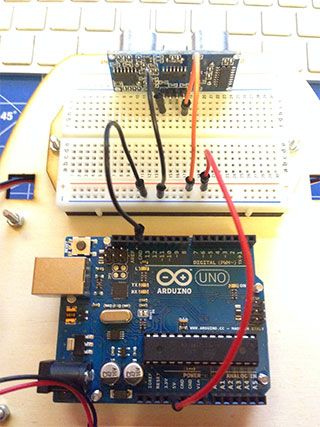
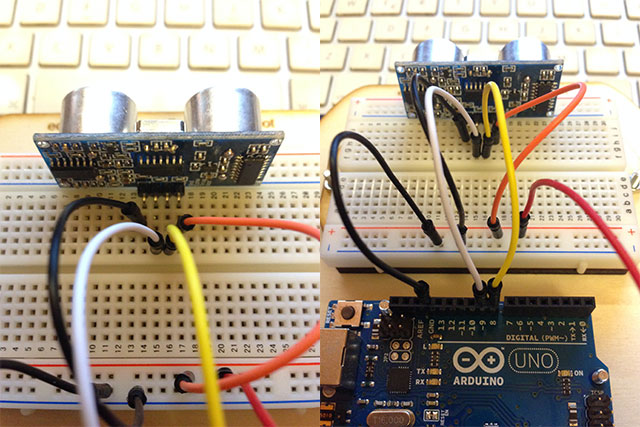
 Diamo movimento al nostro robot Se siete arrivati fino a questo punto avete aggiunto alle vostre competenze l’uso dei servomotori e dei sensori ad ultrasuoni. Combiniamo queste due abilità sarete in grado di movimentare il vostro robot facendogli evitare ostacoli. Incominciamo con unire il codice per governare i servomotori e il sensore ad ultrasuoni che avete utilizzato:
Diamo movimento al nostro robot Se siete arrivati fino a questo punto avete aggiunto alle vostre competenze l’uso dei servomotori e dei sensori ad ultrasuoni. Combiniamo queste due abilità sarete in grado di movimentare il vostro robot facendogli evitare ostacoli. Incominciamo con unire il codice per governare i servomotori e il sensore ad ultrasuoni che avete utilizzato: