Addendum al progetto EduRobot.
Una settimana è bastata per scatenare la fantasia di giovani studenti alle prese con EduRobot per l’attività di Alternanza Scuola Lavoro. Le relazioni di lavoro mettono in evidenza soluzioni alternative originali, la richiesta è di continuare ad aggiungere funzionalità ad EduRobot, vedremo nelle prossime settimane come proseguire con i lavori, ma sicuramente in questa prima fase mi posso ritenere soddisfatto! 😊
Tra le richieste che mi sono state fatte vi è quella di inserire un display per aggiungere interattività con il robot. Tra le possibilità ho suggerito l’utilizzo di un LCD 16×2 Hitachi HD44780 1602 quelli in dotazione con molti kit Arduino. Per rendere più agevole la gestione e i collegamenti, visto l’elevato numero di connessioni presenti su EduRobot, ho consigliato l’utilizzo di un modulo PCF8574T per il controllo in I2C, poiché gli studenti sono giovani ed ancora non hanno affrontato questo argomento, con questo post voglio dare un piccolo aiuto.
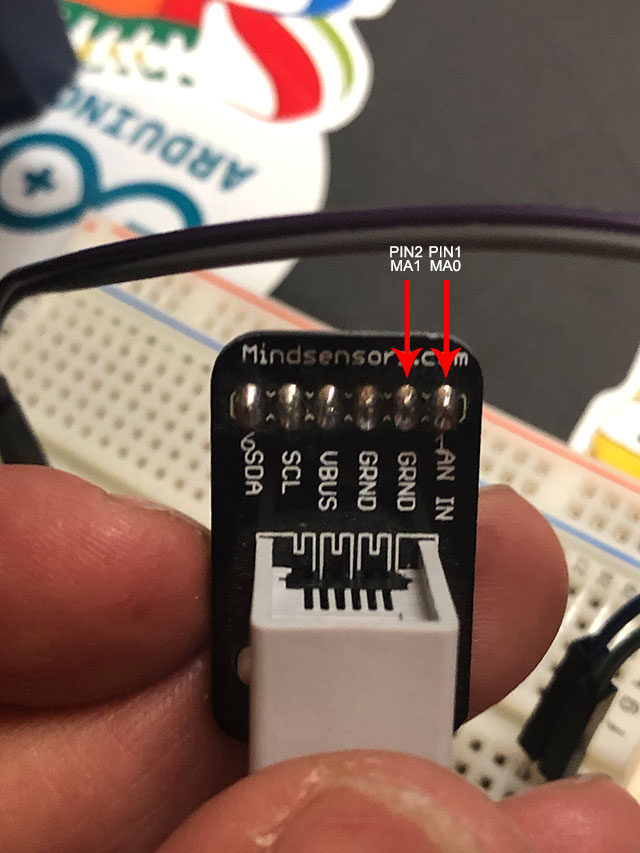
Disponiamo dei moduli della sunfounder su cui è già saldato il modulo i2C:
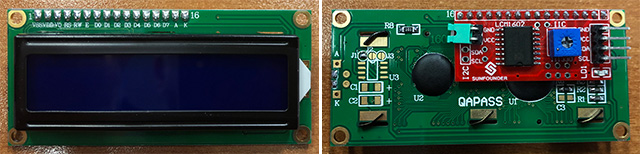
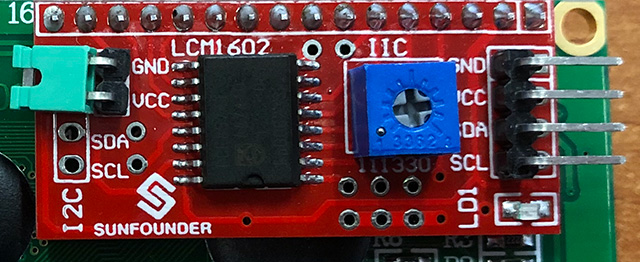
l’utilizzo è identico ai più comuni expander esterni come quelli indicati nell’immagine che segue:
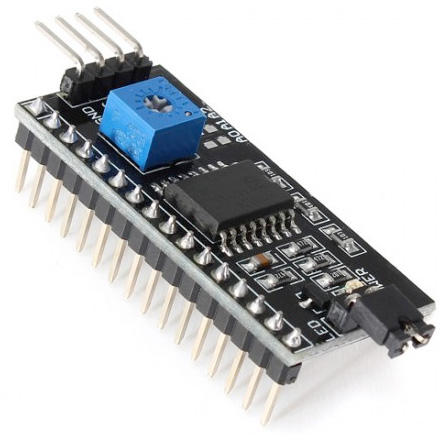
Il display è costituito da 4 pin di connessione, due dedicati all’alimentazione e due alla comunicazione i2C.
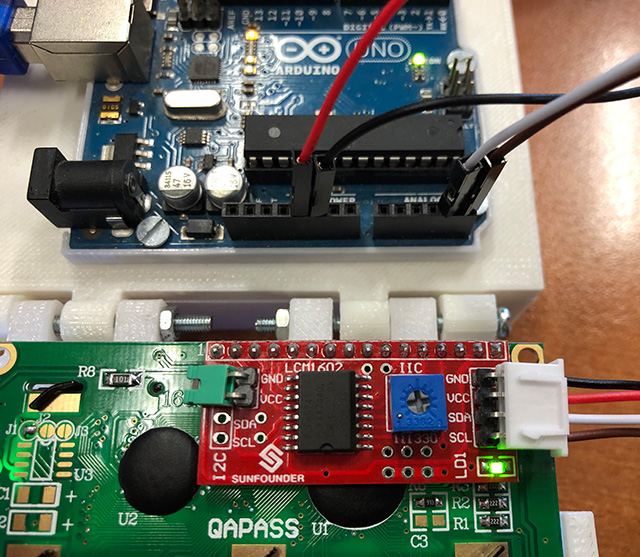
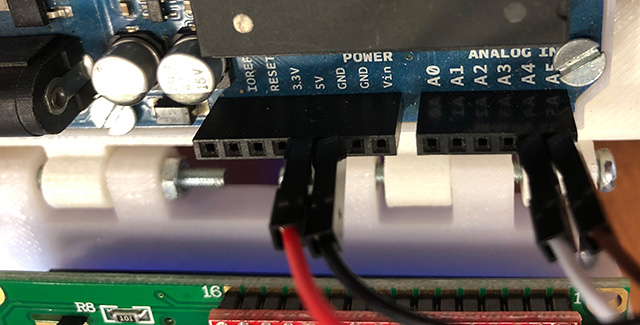
Le connessioni tra LCD1602 i2C ed Arduino sono i seguenti:
LCD1602 —> Arduino
GND -> GND
Vcc -> 5V
SDA -> A4
SCL -> A5
Per poter utilizzare questo display è necessario installare la libreria LiquidCrystal_I2C dal seguente link: https://github.com/fdebrabander/Arduino-LiquidCrystal-I2C-library
Prelevate il file .zip ed installate la libreria direttamente dall’IDE di Arduino:
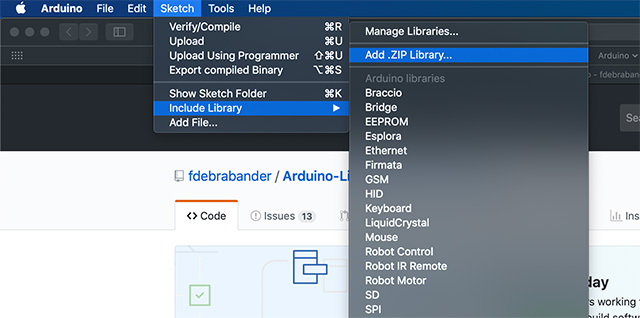
in alternativa potete scompattare e copiare il tutto nella cartella libraries di Arduino.
Piccolo avvertimento, sicuramente nelle vostre sperimentazioni prenderete spunto da sketch che troverete on-line, alcune volte questi esempi sono datati e si riferiscono ad una versione dell’ide di qualche anno fa in cui si poteva inizializzare l’LCD nel setup con: lcd.init(), ciò non è più possibile sostituitela con la classe lcd.begin() così come indicato negli esempi che seguono.
Includo a questo post una serie di sketch tutti tratti dal reference di Arduino e riadattati per un uso con il modulo PCF8574T in modo da accelerare le attività di sperimentazione dei miei allievi.
Il funzionamento di ogni esempio è dettagliato con commenti all’interno degli sketch.
/* Prof. Michele Maffucci
* Utilizzo di un display LCD 16×2 Hitachi HD44780 1602
* con modulo i2C PCF8574T
* Esempio 1: scrittura testo su due righe
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// inizializzazione della libreria in cui è descritta la modalità di utilizzo dei pin
LiquidCrystal_I2C lcd(0x27, 16, 2); // impostazione dell'indirizzo dell'LCD 0x27 di 16 caratteri e 2 linee
//-----------------------------
void setup()
{
lcd.begin(); // inizializzazione dell'LCD
lcd.backlight(); // attivazione della retroilluminazione
}
//-----------------------------
void loop()
{
lcd.setCursor(2,0);
lcd.print("Ciao Ragazzi");
lcd.setCursor(0,1);
lcd.print("Io sono EduRobot");
}
/* Prof. Michele Maffucci
* Utilizzo di un display LCD 16×2 Hitachi HD44780 1602
* con modulo i2C PCF8574T
* Esempio 2: noBlink - Blink
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// inizializzazione della libreria in cui è descritta la modalità di utilizzo dei pin
LiquidCrystal_I2C lcd(0x27, 16, 2); // impostazione dell'indirizzo dell'LCD 0x27 di 16 caratteri e 2 linee
//-----------------------------
void setup()
{
lcd.begin(); // inizializzazione dell'LCD
lcd.backlight(); // attivazione della retroilluminazione
}
//-----------------------------
void loop() {
// Turn off the blinking cursor:
lcd.noBlink();
delay(3000);
// Turn on the blinking cursor:
lcd.blink();
delay(3000);
}
/* Prof. Michele Maffucci
* Utilizzo di un display LCD 16×2 Hitachi HD44780 1602
* con modulo i2C PCF8574T
* Esempio 3: noDisplay - Display
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// inizializzazione della libreria in cui è descritta la modalità di utilizzo dei pin
LiquidCrystal_I2C lcd(0x27, 16, 2); // impostazione dell'indirizzo dell'LCD 0x27 di 16 caratteri e 2 linee
//-----------------------------
void setup()
{
lcd.begin(); // inizializzazione dell'LCD
lcd.backlight(); // attivazione della retroilluminazione
lcd.print("EduRobot");
}
//-----------------------------
void loop() {
// disattiva il display
lcd.noDisplay();
delay(500);
// attiva il display
lcd.display();
delay(500);
}
/* Prof. Michele Maffucci
* Utilizzo di un display LCD 16×2 Hitachi HD44780 1602
* con modulo i2C PCF8574T
* Esempio 4: scrollDisplayLeft() - scrollDisplayRight()
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// inizializzazione della libreria in cui è descritta la modalità di utilizzo dei pin
LiquidCrystal_I2C lcd(0x27, 16, 2); // impostazione dell'indirizzo dell'LCD 0x27 di 16 caratteri e 2 linee
//-----------------------------
void setup()
{
lcd.begin(); // inizializzazione dell'LCD
lcd.backlight(); // attivazione della retroilluminazione
lcd.print("EduRobot");
delay(1000);
}
//-----------------------------
void loop() {
// sposta di 8 posizioni (lunghezza della tringa: EduRobot) a sinistra
for (int positionCounter = 0; positionCounter < 8; positionCounter++) {
// per far percepire la variazione di posizione del testo mettiamo in pausa per un breve istante
lcd.scrollDisplayLeft();
// aspetta un momento:
delay(150);
}
// sposta di 24 posizioni (lunghezza della tringa + lunghezza del siplay(n. colonne)) a destra
for (int positionCounter = 0; positionCounter < 24; positionCounter++) {
// sposta di una posizione a destra
lcd.scrollDisplayRight();
// per far percepire la variazione di posizione del testo mettiamo in pausa per un breve istante
delay(150);
}
// sposta di 24 posizioni (lunghezza della tringa + lunghezza del siplay(n. colonne)) a sinistra
// to move it back to center:
for (int positionCounter = 0; positionCounter < 24; positionCounter++) {
// sposta di una posizione a sinistra
lcd.scrollDisplayLeft();
// per far percepire la variazione di posizione del testo mettiamo in pausa per un breve istante
delay(150);
}
// al termine di un ciclo di uno spostamento destra e sinistra
// attesa di 1 secondo
delay(1000);
}
/* Prof. Michele Maffucci
* Utilizzo di un display LCD 16×2 Hitachi HD44780 1602
* con modulo i2C PCF8574T
* Esempio 5: Serial Input
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// inizializzazione della libreria in cui è descritta la modalità di utilizzo dei pin
LiquidCrystal_I2C lcd(0x27, 16, 2); // impostazione dell'indirizzo dell'LCD 0x27 di 16 caratteri e 2 linee
//-----------------------------
void setup()
{
lcd.begin(); // inizializzazione dell'LCD
lcd.backlight(); // attivazione della retroilluminazione
Serial.begin(9600); // inizializzazione della porta seriale
}
//-----------------------------
void loop() {
// quando un carattere viene inviato alla serial monitor...
if (Serial.available()) {
// attende un momento prima di inviare il testo sulla seril monitor
delay(100);
// cancella lo schermo
lcd.clear();
// legge tutti i caratteri disponibili sulla seriale
while (Serial.available() > 0) {
// visualizza i caratteri sul display
lcd.write(Serial.read());
}
}
}
/* Prof. Michele Maffucci
* Utilizzo di un display LCD 16×2 Hitachi HD44780 1602
* con modulo i2C PCF8574T
* Esempio 6: setCursor()
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// inizializzazione della libreria in cui è descritta la modalità di utilizzo dei pin
LiquidCrystal_I2C lcd(0x27, 16, 2); // impostazione dell'indirizzo dell'LCD 0x27 di 16 caratteri e 2 linee
//-----------------------------
const int numRows = 2;
const int numColonne = 16;
void setup()
{
lcd.begin(); // inizializzazione dell'LCD
lcd.backlight(); // attivazione della retroilluminazione
}
//-----------------------------
void loop() {
// stampa in loop i caratteri ASCII da 'a' a 'z':
for (int lettera = 'a'; lettera <= 'z'; lettera++) {
// ciclo per le colonne
for (int riga = 0; riga < numRows; riga++) {
// ciclo per le righe
for (int colonna = 0; colonna < numColonne; colonna++) {
// imposta la posizione del cursore
lcd.setCursor(colonna, riga);
// stama il carattere
lcd.write(lettera);
delay(200);
}
}
}
}
/* Prof. Michele Maffucci
* Utilizzo di un display LCD 16×2 Hitachi HD44780 1602
* con modulo i2C PCF8574T
* Esempio 7: leftToRight() - rightToLeft()
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// inizializzazione della libreria in cui è descritta la modalità di utilizzo dei pin
LiquidCrystal_I2C lcd(0x27, 16, 2); // impostazione dell'indirizzo dell'LCD 0x27 di 16 caratteri e 2 linee
//-----------------------------
int lettera = 'a';
void setup()
{
lcd.begin(); // inizializzazione dell'LCD
lcd.backlight(); // attivazione della retroilluminazione
lcd.cursor(); // attiva il cursore
}
//-----------------------------
void loop() {
// cambia direzione (da destra a sinistra)
// quando l'ultima lettera stampata è la 'm':
if (lettera == 'm') {
// sposta il cursore a destra per stampare la lettera successiva
lcd.rightToLeft();
}
// cambia direzione (da sinistra a destra)
// // quando l'ultima lettera stampata è la 's':
if (lettera == 's') {
// sposta il cursore a sinistra per stampare la lettera successiva
lcd.leftToRight();
}
// reset quando atriviamo alla 'z':
if (lettera > 'z') {
// spostare il cursore a (0,0):
lcd.home();
// ricomincia dalla posizione 0
lettera = 'a';
}
// stampa il carattere
lcd.write(lettera);
// aspetta un secondo
delay(1000);
// incrementa la lettera
lettera++;
}
Buona sperimentazione 🙂