Un contest con me stesso 🙂
In questo periodo sto sviluppando una serie di lavori, principalmente corsi di formazione e progettazione elettronica. Per quanto riguarda la formazione il primo corso “STEAM: idee di lezione e didattica attiva – 3’ed.” in partenza il 27/06/22 ed il secondo “Realizzare laboratori green con il Making e il Coding 2′ ed.” in partenza il 04/07/22 e per questi sto aggiungendo/migliorando alcune parti.
Come spesso accade quando sviluppo nuovi contenuti, nella fase iniziale di ricerca e progettazione, mi concentro su un elemento specifico un “attivatore” che può anche non essere fondamentale per l’intero progetto, ma per me risulta utile per attivare tutto il processo creativo.
Per i contenuti didattici questo elemento “attivatore” molto spesso è un oggetto fisico, un progetto elettronico che risolve un problema reale o anche un oggetto stampato in 3D. L’oggetto realizzato, che manipolo e modifico, innesca la costruzione di una mia mappa mentale che mi permette di sviluppare l’intero progetto formativo.
Questo, in estrema sintesi è uno dei metodi che utilizzo per progettare.
Quindi con: “7 stampe 3d in 7 giorni” cosa voglio mostrare?
Banalmente 7 “attivatori”, 7 oggetti semplici che ho utilizzato per sviluppare alcune parti dei miei prossimi corsi, sono oggetti che nascono, come spesso accade, da richieste fatte da colleghi in questo caso di scuola elementare e media, oppure da mie idee.
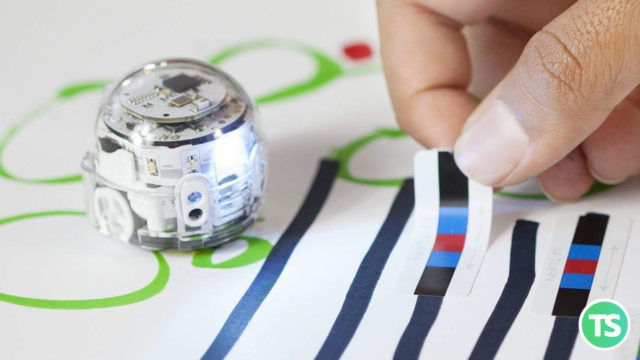
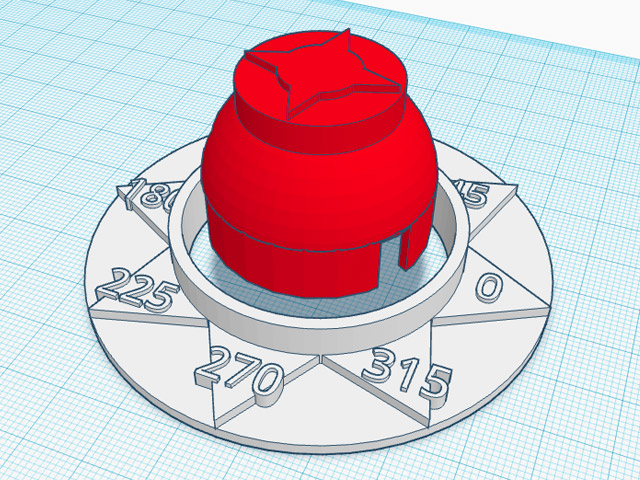
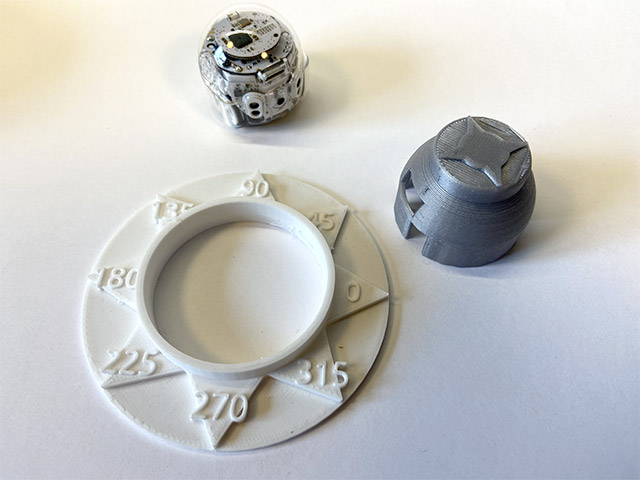
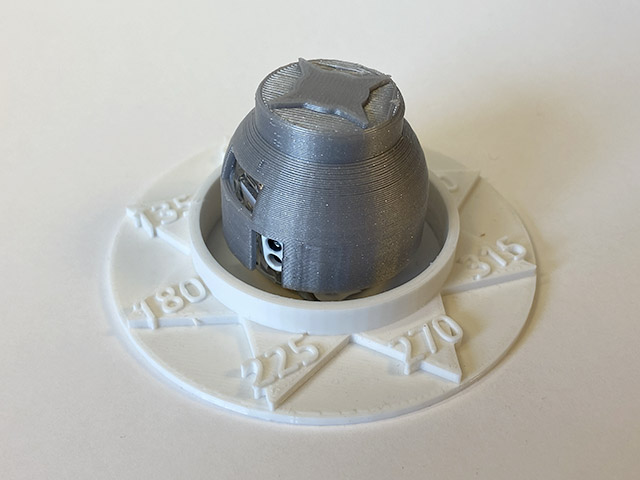
Come primo attivatore vi condivido due oggetti stampati in 3D dedicati al piccolo Ozobot EVO.
Si tratta di un goniometro al cui centro viene posto il robot. Il goniometro servirà per mettere in evidenza l’angolo di rotazione del robot. Per rendere più comoda la lettura dell’angolo di rotazione ho realizzato un “cappello” per il robot su cui ho inserito quattro frecce tra loro ortogonali che facilitano l’indicazione dell’angolo di rotazione.
Per scaricare i file per la stampa 3D seguire il link su Thingiverse.
Per chi fosse interessato può seguire il link su Thingiverse per prelevare i file per la stampa 3D.
Buon Making a tutti 🙂