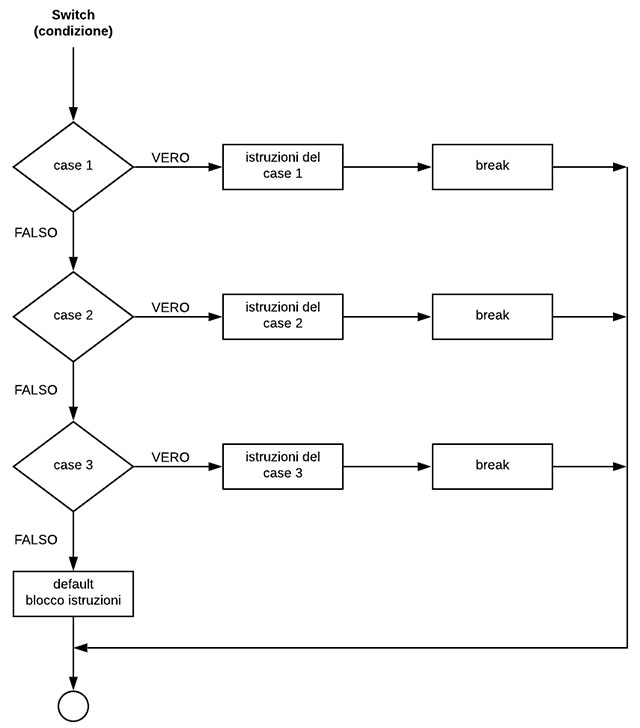
Durante le scorse settimane ho svolto una serie di esercitazioni di laboratorio che avevano l’obiettivo di insegnare l’uso dell’istruzione switch…case e la modalità di ricezione dati seriali in Arduino.
La prima lezione è introdotta nel post:
Appunti di programmazione su Arduino: controllo di flusso – istruzione switch..case
Nell’articolo trovate due link che fanno riferimento a due guide sul sito Arduino in cui viene mostrato come utilizzando l’istruzione switch…case:
- per inviare un output specifico sulla Serial monitor in funzione del valore letto dal sensore;
- usare la Serial input per accendere uno specifico LED.
La seconda lezione è basata sul tutorial:
Arduino – lezione 08: display a 7 segmenti e creazione di librerie
In cui viene mostrato come pilotare un display a 7 segmenti realizzando un contatore da 0 a 9, e cicli di visualizzazione di numeri pari e numeri dispari. Nella parte finale del tutorial viene mostrato come realizzare una libreria dedicata alla gestione del display a 7 segmenti.
La terza lezione mostra come ricevere dati dalla seriale in Arduino.
Per questa parte è indispensabile svolgere le esercitazioni che trovate nelle slide:
Alfabeto di Arduino – Lezione 3 da pagina 53 a pagina 62
Successivamente aggiungo gli esercizi che di seguito condivido, in cui riprendendo la gestione del display a 7 segmenti, però questa volta inviamo dati dal computer mediante la tastiera al display comandato da Arduino.
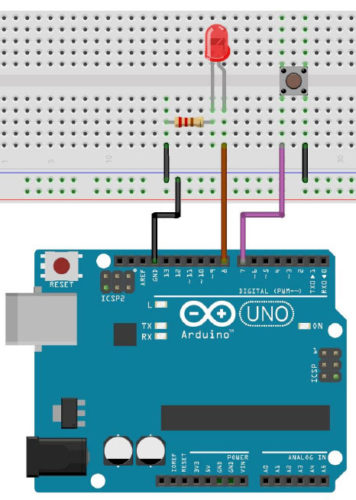
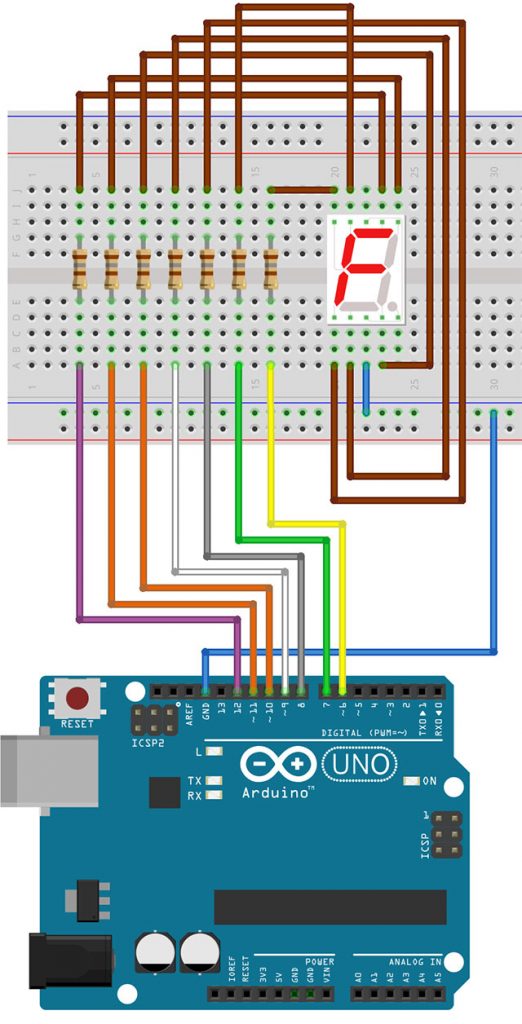
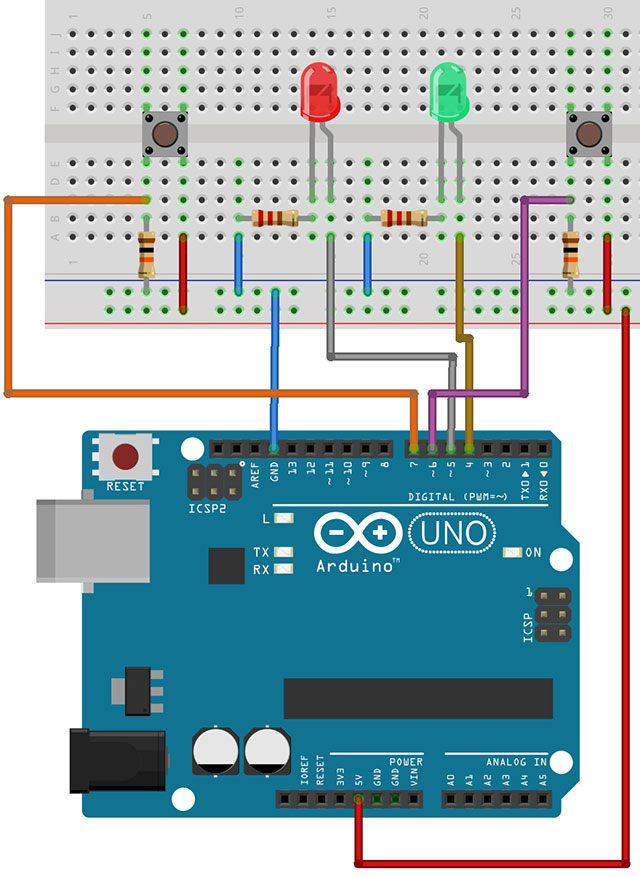
Per lo svolgimento di questa parte è necessario effettuare una piccola variazione rispetto al circuito mostrato in: Arduino – lezione 08: display a 7 segmenti e creazione di librerie in questa lezione volutamente utilizzo tra tutti i pin il piedino 1 di Arduino che viene utilizzato normalmente come pin TX e ciò provoca un comportamento anomalo di accensione del LED e del display, ciò mi permette di spiegare l’utilizzo dei pin 0 e 1 di Arduino.
Il circuito da realizzare per la terza lezione è il seguente (i pin di controllo di Arduino sono presi in maniera sequenziale dal pin 6 al pin 12)
Esercitazione 1
- Realizzare un contasecondi da 0 a 9 utilizzando un display 7 segmenti a catodo comune
Soluzione
// Prof. Michele Maffucci
// 14.04.2019
// Conteggio 9 secondi con display 7 segmenti a catodo comune
// definizione delle variabili a cui collegare ogni segmento del display
// la lettera rappresenta il segmento del display il numero il pin
// digitale di Arduino a cui è collegato il corrispondente pin del display
const int a=12;
const int b=11;
const int c=10;
const int d=9;
const int e=8;
const int f=7;
const int g=6;
// variabile che definisce la velocità con cui appaiono i numeri
const int pausa = 1000;
void setup()
{
// inizializzazione dei pin ad OUTPUT
for (int i=6; i<13; i++) {
pinMode(i, OUTPUT);
}
}
void loop ()
{
for (int i=0;i<10;i++)
{
LedAcceso(i);
delay (pausa);
}
}
void LedAcceso(int n)
{
switch(n)
{
case 0:
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, LOW);
break;
case 1:
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case 2:
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, LOW);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case 3:
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case 4:
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case 5:
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case 6:
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case 7:
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case 8:
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case 9:
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
}
}
Esercitazione 2
- Scrittura mediante tastiera (su serial monitor) di un numero da 0 a 9.
- La scrittura avviene quando viene premuto l’invio della tastiera.
Soluzione
// Prof. Michele Maffucci
// 14.04.2019
// Scrittura mediante tastiera (su serial monitor) di un numero da 0 a 9
// La scrittura avviene quando si preme invio.
// definizione delle variabili a cui collegare ogni segmento del display
// la lettera rappresenta il segmento del display il numero il pin
// digitale di Arduino a cui è collegato il corrispondente pin del display
const int a = 12;
const int b = 11;
const int c = 10;
const int d = 9;
const int e = 8;
const int f = 7;
const int g = 6;
void setup()
{
// inizializzazione della seriale
Serial.begin(9600);
// inizializzazione dei pin ad OUTPUT
for (int i = 6; i < 13; i++) {
pinMode(i, OUTPUT);
}
}
void loop()
{
if (Serial.available()) {
int selettore = Serial.read();
LedAcceso(selettore);
}
}
void LedAcceso(int n)
{
switch (n)
{
case '0':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, LOW);
break;
case '1':
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '2':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, LOW);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '3':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '4':
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '5':
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '6':
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '7':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '8':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '9':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
}
}
Esercitazione 3
- Scrittura mediante tastiera (su serial monitor) di un numero da 0 a 9.
- La scrittura avviene quando viene premuto l’invio della tastiera.
- All’avvio del programma deve essere mostrato un gioco di luci con accensione e spegnimento veloce in sequenza dei led: a, b, c, d, e, f del display
Soluzione
// Prof. Michele Maffucci
// 14.04.2019
// Scrittura mediante tastiera (su serial monitor) di un numero da 0 a 9
// La scrittura avviena quando si preme invio.
// All'avvio del programma gioco di luci con accensione veloce dei led: a, b, c, d, e, f
// definizione delle variabili a cui collegare ogni segmento del display
// la lettera rappresenta il segmento del display il numero il pin
// digitale di Arduino a cui è collegato il corrispondente pin del display
const int a = 12;
const int b = 11;
const int c = 10;
const int d = 9;
const int e = 8;
const int f = 7;
const int g = 6;
const int intervallo = 10;
void setup()
{
// inizializzazione della seriale
Serial.begin(9600);
// inizializzazione dei pin ad OUTPUT
for (int i = 6; i < 13; i++) {
pinMode(i, OUTPUT);
}
roll();
}
void loop()
{
if (Serial.available()) {
int selettore = Serial.read();
LedAcceso(selettore);
}
}
void roll() {
for (int i = 0; i < 6; i++) {
digitalWrite(a, HIGH);
delay(intervallo);
digitalWrite(a, LOW);
delay(intervallo);
digitalWrite(b, HIGH);
delay(intervallo);
digitalWrite(b, LOW);
delay(intervallo);
digitalWrite(c, HIGH);
delay(intervallo);
digitalWrite(c, LOW);
delay(intervallo);
digitalWrite(d, HIGH);
delay(intervallo);
digitalWrite(d, LOW);
delay(intervallo);
digitalWrite(e, HIGH);
delay(intervallo);
digitalWrite(e, LOW);
delay(intervallo);
digitalWrite(f, HIGH);
delay(intervallo);
digitalWrite(f, LOW);
delay(intervallo);
}
}
void LedAcceso(int n)
{
switch (n)
{
case '0':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, LOW);
break;
case '1':
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '2':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, LOW);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '3':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '4':
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '5':
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '6':
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '7':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '8':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '9':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
}
}
Esercitazione 4
- Scrittura mediante tastiera (su serial monitor) di un numero da 0 a 9.
- La scrittura avviene quando viene premuto l’invio della tastiera.
- All’avvio del programma deve essere mostrato un gioco di luci con accensione e spegnimento veloce in sequenza dei led: a, b, c, d, e, f del display
- Alla pressione di un tasto diverso dai numeri da 0 a 9, gioco di luci e spegnimento del display.
Soluzione
// Prof. Michele Maffucci
// 14.04.2019
// Scrittura mediante tastiera (su serial monitor) di un numero da 0 a 9
// La scrittura avviena quando si preme invio.
// All'avvio del programma gioco di luci con accensione veloce dei led: a, b, c, d, e, f
// Alla pressione di un tasto diverso dai numeri da 0 a 9, gioco di luci e spegnimento del display.
// definizione delle variabili a cui collegare ogni segmento del display
// la lettera rappresenta il segmento del display il numero il pin
// digitale di Arduino a cui è collegato il corrispondente pin del display
const int a = 12;
const int b = 11;
const int c = 10;
const int d = 9;
const int e = 8;
const int f = 7;
const int g = 6;
const int intervallo = 10;
void setup()
{
// inizializzazione della seriale
Serial.begin(9600);
// inizializzazione dei pin ad OUTPUT
for (int i = 6; i < 13; i++) {
pinMode(i, OUTPUT);
}
roll();
}
void loop()
{
if (Serial.available()) {
int selettore = Serial.read();
LedAcceso(selettore);
}
}
void roll() {
for (int i = 0; i < 6; i++) {
digitalWrite(a, HIGH);
delay(intervallo);
digitalWrite(a, LOW);
delay(intervallo);
digitalWrite(b, HIGH);
delay(intervallo);
digitalWrite(b, LOW);
delay(intervallo);
digitalWrite(c, HIGH);
delay(intervallo);
digitalWrite(c, LOW);
delay(intervallo);
digitalWrite(d, HIGH);
delay(intervallo);
digitalWrite(d, LOW);
delay(intervallo);
digitalWrite(e, HIGH);
delay(intervallo);
digitalWrite(e, LOW);
delay(intervallo);
digitalWrite(f, HIGH);
delay(intervallo);
digitalWrite(f, LOW);
delay(intervallo);
}
}
void LedAcceso(int n)
{
switch (n)
{
case '0':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, LOW);
break;
case '1':
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '2':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, LOW);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '3':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '4':
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '5':
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '6':
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '7':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '8':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '9':
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
default:
digitalWrite(a, LOW);
digitalWrite(b, LOW);
digitalWrite(c, LOW);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
roll();
}
}
Esercitazione 5
- Scrittura mediante tastiera (su serial monitor) di un numero da 0 a 9.
- La scrittura avviene quando viene premuto l’invio della tastiera.
- All’avvio del programma deve essere mostrato un gioco di luci con accensione e spegnimento veloce in sequenza dei led: a, b, c, d, e, f del display.
- Alla pressione di un tasto diverso dai numeri da 0 a 9, gioco di luci e spegnimento del display.
- Alla pressione di un numero da 0 a 9 prima della comparsa del numero mostrare gioco di luci.
Soluzione
// Prof. Michele Maffucci
// 14.04.2019
// Scrittura mediante tastiera (su serial monitor) di un numero da 0 a 9
// La scrittura avviena quando si preme invio.
// All'avvio del programma gioco di luci con accensione veloce dei led: a, b, c, d, e, f
// Alla pressione di un tasto diverso dai numeri da 0 a 9, gioco di luci e spegnimento del display.
// Alla pressione di un numero da 0 a 9 prima della comparsa del numero mostrare gioco di luci.
// definizione delle variabili a cui collegare ogni segmento del display
// la lettera rappresenta il segmento del display il numero il pin
// digitale di Arduino a cui è collegato il corrispondente pin del display
const int a = 12;
const int b = 11;
const int c = 10;
const int d = 9;
const int e = 8;
const int f = 7;
const int g = 6;
const int intervallo = 10;
void setup()
{
// inizializzazione della seriale
Serial.begin(9600);
// inizializzazione dei pin ad OUTPUT
for (int i = 6; i < 13; i++) {
pinMode(i, OUTPUT);
}
roll();
}
void loop()
{
if (Serial.available()) {
int selettore = Serial.read();
LedAcceso(selettore);
}
}
void roll() {
// spegnimento di tutti i led del display
digitalWrite(a, LOW);
digitalWrite(b, LOW);
digitalWrite(c, LOW);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
// ciclo di sei accensioni e spegnimenti dei led a, b, c, d, e, f
for (int i = 0; i < 6; i++) {
digitalWrite(a, HIGH);
delay(intervallo);
digitalWrite(a, LOW);
delay(intervallo);
digitalWrite(b, HIGH);
delay(intervallo);
digitalWrite(b, LOW);
delay(intervallo);
digitalWrite(c, HIGH);
delay(intervallo);
digitalWrite(c, LOW);
delay(intervallo);
digitalWrite(d, HIGH);
delay(intervallo);
digitalWrite(d, LOW);
delay(intervallo);
digitalWrite(e, HIGH);
delay(intervallo);
digitalWrite(e, LOW);
delay(intervallo);
digitalWrite(f, HIGH);
delay(intervallo);
digitalWrite(f, LOW);
delay(intervallo);
}
}
void LedAcceso(int n)
{
switch (n)
{
case '0':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, LOW);
break;
case '1':
roll();
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '2':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, LOW);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '3':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '4':
roll();
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '5':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '6':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '7':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '8':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '9':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
default:
roll();
}
}
Esercitazione 6
Realizzare le stesse funzionalità dell’esercizio 5 ma ottimizzare la funzione roll() in modo che lo spegnimento iniziale dei LED sia costituito da un ciclo for e l’accensione e lo spegnimento sequenziale sia realizzato da due cicli for annidati.
Soluzione
// Prof. Michele Maffucci
// 14.04.2019
// Scrittura mediante tastiera (su serial monitor) di un numero da 0 a 9
// La scrittura avviena quando si preme invio.
// All'avvio del programma gioco di luci con accensione veloce dei led: a, b, c, d, e, f
// Alla pressione di un tasto diverso dai numeri da 0 a 9, gioco di luci e spegnimento del display.
// Alla pressione di un numero da 0 a 9 prima della comparsa del numero mostrare gioco di luci
// Versione in cui la funzione roll() è stata ottimizzata
// Lo spegnimento iniziale dei LED è costituito da un ciclo for e l'accensione e lo spegnimento sequenziale
// è realizzato da due cicli for annidati.
// definizione delle variabili a cui collegare ogni segmento del display
// la lettera rappresenta il segmento del display il numero il pin
// digitale di Arduino a cui è collegato il corrispondente pin del display
const int a = 12;
const int b = 11;
const int c = 10;
const int d = 9;
const int e = 8;
const int f = 7;
const int g = 6;
const int intervallo = 10;
void setup()
{
// inizializzazione della seriale
Serial.begin(9600);
// inizializzazione dei pin ad OUTPUT
for (int i = 6; i < 13; i++) {
pinMode(i, OUTPUT);
}
roll();
}
void loop()
{
if (Serial.available()) {
int selettore = Serial.read();
LedAcceso(selettore);
}
}
// funzione per gioco di luci
void roll() {
// spegnimento di tutti i led del display
for (int i = 6; i < 13; i++) {
digitalWrite(i, LOW);
}
// ciclo di sei accensioni e spegnimenti dei led a, b, c, d, e, f
for (int m = 0; m < 6; m++) {
for (int p = 12; p > 6; p--) {
digitalWrite(p, HIGH);
delay(intervallo);
digitalWrite(p, LOW);
delay(intervallo);
}
}
}
// la funzione LedAcceso prende come input il carattere numerico che deve essere mostrato su display
// prima che venga stampato il numero viene eseguita la funzione roll()
void LedAcceso(int n)
{
switch (n)
{
case '0':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, LOW);
break;
case '1':
roll();
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '2':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, LOW);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '3':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '4':
roll();
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '5':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '6':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '7':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '8':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '9':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
default:
roll();
}
}
Esercitazione 7
Realizzare le stesse funzionalità dell’esercizio 6 realizzando una libreria di gestione “LedAcceso.h” richiamata dallo sketch principale. Per l’esecuzione di questo esercizio seguire le indicazioni fornite al fondo del tutorial: Arduino – lezione 08: display a 7 segmenti e creazione di librerie
Soluzione
LedAcceso.cpp
/* display_sette_segmenti.cpp
libreria che consente il controllo di un display a 7 segmenti a catodo comune
del tipo HDSP 5503
*/
#include "Arduino.h"
const int a = 12;
const int b = 11;
const int c = 10;
const int d = 9;
const int e = 8;
const int f = 7;
const int g = 6;
const int intervallo = 10;
// funzione per gioco di luci
void roll() {
// spegnimento di tutti i led del display
for (int i = 6; i < 13; i++) {
digitalWrite(i, LOW);
}
// ciclo di sei accensioni e spegnimenti dei led a, b, c, d, e, f
for (int i = 0; i < 6; i++) {
for (int j = 12; j > 6; j--) {
digitalWrite(j, HIGH);
delay(intervallo);
digitalWrite(j, LOW);
delay(intervallo);
}
}
}
// la funzione LedAcceso prende come input il carattere numerico che deve essere mostrato su display
// prima che venga stampato il numero viene eseguita la funzione roll()
void LedAcceso(int n)
{
switch (n)
{
case '0':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, LOW);
break;
case '1':
roll();
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '2':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, LOW);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '3':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, HIGH);
break;
case '4':
roll();
digitalWrite(a, LOW);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '5':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '6':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, LOW);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '7':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, LOW);
digitalWrite(e, LOW);
digitalWrite(f, LOW);
digitalWrite(g, LOW);
break;
case '8':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, HIGH);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
case '9':
roll();
digitalWrite(a, HIGH);
digitalWrite(b, HIGH);
digitalWrite(c, HIGH);
digitalWrite(d, HIGH);
digitalWrite(e, LOW);
digitalWrite(f, HIGH);
digitalWrite(g, HIGH);
break;
default:
roll();
}
}
LedAcceso.h
/* LedAcceso.h
header file della libreria LedAcceso
*/
#include "Arduino.h"
void LedAcceso(int n); // prototipo della funzione
void roll(); // prototipo della funzione
sketch
// Prof. Michele Maffucci
// 14.04.2019
// Scrittura mediante tastiera (su serial monitor) di un numero da 0 a 9
// La scrittura avviena quando si preme invio.
// All'avvio del programma gioco di luci con accensione veloce dei led: a, b, c, d, e, f
// Alla pressione di un tasto diverso dai numeri da 0 a 9, gioco di luci e spegnimento del display.
// Alla pressione di un numero da 0 a 9 prima della comparsa del numero mostrare gioco di luci
// Versione con inclusione della libreria di gestione dell'accensione del display
// definizione delle variabili a cui collegare ogni segmento del display
// la lettera rappresenta il segmento del display il numero il pin
// digitale di Arduino a cui è collegato il corrispondente pin del display
#include "LedAcceso.h"
const int a = 12;
const int b = 11;
const int c = 10;
const int d = 9;
const int e = 8;
const int f = 7;
const int g = 6;
const int intervallo = 10;
void setup()
{
// inizializzazione della seriale
Serial.begin(9600);
// inizializzazione dei pin ad OUTPUT
for (int i = 6; i < 13; i++) {
pinMode(i, OUTPUT);
}
roll();
}
void loop()
{
// verifica se sulla serial monitor è presente un carattere,
// se la condizione è vera viene letto il carattere presente sulla serial monitor
if (Serial.available()) {
int selettore = Serial.read();
LedAcceso(selettore);
}
}
Buon Coding a tutti 🙂

 Uno degli errori tipici che riscontro durante le correzioni degli esercizi dei miei studenti alle prime esperienze nell’uso dei microcontrollori, è quello di ritenere che su un pin non collegato a nulla vi sia la presenza di uno stato logico LOW, questo non è corretto. Viene definito floating (flottante) un pin di ingresso a cui non è collegato nulla, in questa condizione sul pin potrebbe essere presente qualsiasi stato.
Uno degli errori tipici che riscontro durante le correzioni degli esercizi dei miei studenti alle prime esperienze nell’uso dei microcontrollori, è quello di ritenere che su un pin non collegato a nulla vi sia la presenza di uno stato logico LOW, questo non è corretto. Viene definito floating (flottante) un pin di ingresso a cui non è collegato nulla, in questa condizione sul pin potrebbe essere presente qualsiasi stato.