Questa guida nasce con un obiettivo doppio: replicare in contesti diversi ciò che ho già sperimentato sul campo, a partire da casa mia e trasformare Home Assistant in una palestra didattica concreta per la scuola (ITIS). Il progetto è necessariamente diluito nel tempo: il mio lavoro quotidiano in classe è intenso e scrivere “un po’ alla volta” mi consente di essere più costante e produttivo. Nei prossimi mesi la guida sarà utilizzata integralmente dai miei studenti, quindi per me è anche un modo per strutturare meglio i materiali e organizzare le attività di laboratorio in modo progressivo e replicabile.
Come sempre trovate su queste pagine una sintesi, di un percorso più esteso ed approfondito che verrà svolto in presenza a scuola.
Nota sull’origine dei contenuti
Questa guida nasce dalla traduzione in italiano del manuale di installazione ufficiale di Home Assistant e da miei appunti, il tutto riadattata in alcune parti per un uso didattico a scuola (ITIS), con esempi, lessico semplificato e procedure più guidate pensate per docenti e studenti.
Perché Home Assistant a scuola
La guida nasce per supportare docenti e studenti del percorso di Elettronica ed Automazione dell’ITIS con attività concrete di laboratorio: prototipi, sensori, attuatori, automazioni e dashboard. Farò usare Home Assistant come una vera palestra di allenamento per orchestrare dispositivi e servizi, simulare scenari della vita scolastica (aule, laboratori, LTO), raccogliere dati e creare procedure automatizzate utili alla didattica e all’organizzazione quotidiana.
Vogliamo documentare e standardizzare il lavoro del Laboratorio Territoriale per l’Occupabilità (LTO) e offrire una traccia replicabile: setup chiari, materiali riutilizzabili, esercizi graduali. La guida mostrerà come trasformare Home Assistant in un ambiente di sperimentazione che unisce elettronica, informatica, reti e buone pratiche di gestione del laboratorio, con un percorso pensato per essere seguita passo passo sia in aula sia a casa.
Cos’è Home Assistant
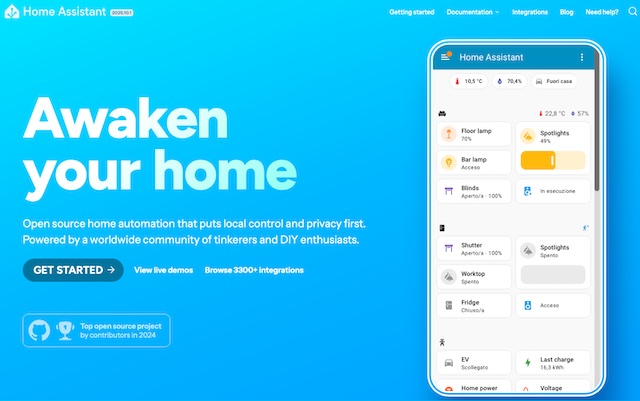
Home Assistant è una piattaforma open-source per l’automazione e il controllo di dispositivi e servizi, pensata per funzionare in locale (privacy e affidabilità) e per integrare centinaia di tecnologie diverse in un’unica interfaccia e motore di automazioni. È supportata da una grande comunità e offre installazioni pronte per Raspberry Pi e altri sistemi, con gestione semplificata di add-on, backup e aggiornamenti.
La variante Home Assistant OS è un sistema operativo dedicato che rende l’installazione “apri e usa” su single-board computer e x86-64, riducendo la manutenzione e facilitando la gestione del laboratorio (snapshot, add-on, supervisione centrale).
Dal punto di vista storico e tecnologico, il progetto nasce nel 2013 ed è oggi sviluppato dalla Open Home Foundation e da una community globale; backend in Python, frontend web, migliaia di integrazioni e un focus costante su controllo locale e sicurezza.
Tradotto in pratica per l’ITIS: un “collante” che ci permette di collegare sensori/attuatori reali, creare dashboard per il laboratorio, costruire automazioni verificabili (trigger-condizioni-azioni) e fare misure e report utili alla valutazione delle attività.
A chi è rivolta la guida
Docenti di elettronica e sistemi che cercano esempi pronti (step-by-step) e materiali riutilizzabili.
Studenti di elettronica/automazione che vogliono vedere subito sensori e attuatori integrati in un flusso “dati > logica > azione”.
LTO / FabLab didattici che vogliono un’impostazione replicabile, con criteri di sicurezza, versioning dei file e checklist operative.
Cosa faremo (indice “a puntate” in fase di realizzazione)
- Preparazione – Scelte hardware, HAOS vs altre installazioni, criteri di rete in laboratorio.
- Installazione su Raspberry Pi – Flash, primo avvio, onboarding, snapshot.
- Interfaccia & Add-on essenziali – File Editor, Samba/backup, MQTT, ESPHome (panoramica).
- Prime automazioni – Trigger, condizioni, azioni, blueprint; notifiche e scene.
- Dashboard di laboratorio – Card base, layout per postazioni, pannello docente.
- Sensori & Attuatori reali – MQTT ed ESPHome con esempi di misura e pilotaggio.
- Energy & Presence (opzionale) – Raccolta dati e visualizzazione didattica.
- Sicurezza & manutenzione – Account, backup, ripristino, troubleshooting “da classe”.
Licenze, privacy e sostenibilità didattica
La natura open-source e il controllo locale permettono di usare Home Assistant anche senza dipendere dal cloud: un vantaggio in termini di privacy, latency e continuità delle esercitazioni in laboratorio. Le integrazioni coprono protocolli e prodotti eterogenei, così da valorizzare strumentazione già presente a scuola e ridurre i costi iniziali.
Esempi di attività “vicine alla vita scolastica”
Ho organizzato le idee in categorie di attività: non saranno tutte realizzate, ma saranno utilizzate come base di discussione con gli studenti per valutarne la fattibilità e scegliere cosa sviluppare in gruppi di progetto (ad esempio in attività di PCTO). L’obiettivo è ragionare su come trasformare un’idea in un prototipo concreto, definendo priorità, vincoli e impatto didattico.
Come farò valutare dagli studenti le proposte (idee anche questa in fase di sviluppo):
- Fattibilità tecnica: sensori/attuatori disponibili, integrazione con Home Assistant, complessità di sviluppo.
- Impatto didattico: competenze coinvolte (elettronica, reti, coding, dati), utilità per la vita scolastica.
- Costi e tempi: componenti necessari, budget, pianificazione a sprint.
- Sicurezza & privacy: uso in ambiente scolastico, conformità e minimizzazione dei dati.
- Manutenibilità & scalabilità: riuso dei moduli, documentazione, possibilità di estendere il progetto.
- Inclusione & accessibilità: benefici per studenti con bisogni educativi speciali.
Ambiente e qualità dell’aria
- Polveri sottili nel cortile (PM2.5/PM10): sensore (es. PMS5003/SDS011) su ESP32; dashboard con trend orari/giornalieri; automation: se PM supera soglia > notifica a docenti/ATA e cartello “ridurre attività all’aperto”.
- Stazione meteo didattica: temperatura/UR, pioggia, vento, radiazione; correlare meteo con assenze in palestra/uscite didattiche.
- Rumore nei corridoi/aula: microfono analogico per livello sonoro; semaforo visivo in classe per autoregolazione.
Sicurezza e accessi
- Sistemi anti-intrusione: PIR, contatti magnetici su porte/finestre, vibrazione su vetrate; se rilevato movimento fuori orario > sirena/luce + notifica con snapshot ESP32-CAM.
- Uscite di emergenza: sensori stato porta + test programmati; se porta ostruita/aperta fuori norma > alert a DSGA/collaboratori.
- Armadi strumentazione: NFC/contatti per apertura; log prelievi/restituzioni per responsabilità e inventario.
Energia e edificio
- Analisi consumo energetico: smart plug (banchi prova, stampanti 3D, forni reflow), pinza amperometrica/Modbus su quadri; automation: spegnimento notturno/standby; report settimanale per classe/spazio.
- Bilancio termico/dispersioni: sonde T°/UR in e out (aule, corridoi, esterno) + porta/finestra aperta; se ΔT anomalo o finestra aperta con riscaldamento ON > notifica; log per stimare dispersioni e comportamenti.
- Monitor fotovoltaico: produzione vs consumi scuola; suggerimento fasce orarie per carichi energivori (laboratorio macchine, stampa 3D).
Laboratori e didattica operativa
- Banchi prova “occupazione & ticket”: pulsante “richiesta aiuto”, stato banco (OK/KO), coda assistenza sul monitor docente.
- Gestione stampanti 3D: sensori temperatura/hotend, consumo, fine-filamento; avviso fine stampa e spegnimento automatico.
- Magazzino componenti: bilance/pesi o contatori ottici su cassettini “critici”; scorte minime > lista acquisti automatica.
Vita quotidiana d’istituto
- Bacheca digitale: dashboard con eventi del giorno, aule occupate, avvisi ATA; aggiornamento da Google Calendar/Sheets.
- Clima “comfort apprendimento”: indice combinato (T°, UR, CO₂, rumore, illuminamento) per aula; suggerimenti operativi (arieggiare, abbassare tapparelle, ecc.).
Inclusione e benessere
- Semaforo acustico-visivo per studenti sensibili al rumore: se superata soglia > luce soft + promemoria “voce bassa”.
- Promemoria routine (PAI/PEI): notifiche discrete su tablet del docente (pause attive, cambio attività, idratazione).
Manutenzione e asset
- Ciclo manutenzione attrezzature: ore di utilizzo macchine/pompe/saldatori; scadenze manutentive.
- Perdite d’acqua (bagni/lab): sensori acqua; chiusura elettrovalvola + avviso bidello.
Come seguire la serie
Pubblicherò gli episodi con cadenza “abbastanza” regolare sul sito. Ogni articolo sarà una porzione del tutorial generale e conterrà file di supporto, checklist e dove necessario schede attività. Se volete ricevere gli aggiornamenti, iscriviti a questo sito o segui i miei canali social.
Non mi resta che dirvi: Buon Making a tutti 🙂