Uno dei progetti che ho assegnato ai miei studenti in questo anno scolastico che volge al termine, è stato quello di progettare e realizzare un sistema di automazione in grado di valutare il comportamento sedentario di una persona quando lavora a computer. Al sistema sono stati aggiunti appositi segnali di allarme che hanno l’obiettivo di invogliare la persona ad effettuare esercizio fisico.
Gli allievi hanno progettare il dispositivo non solo da un punto di vista elettronico, ma anche dal punto di vista dell’usabilità e del design.
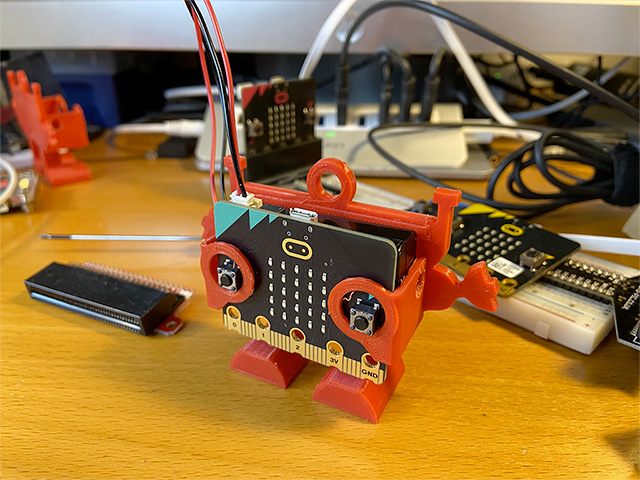
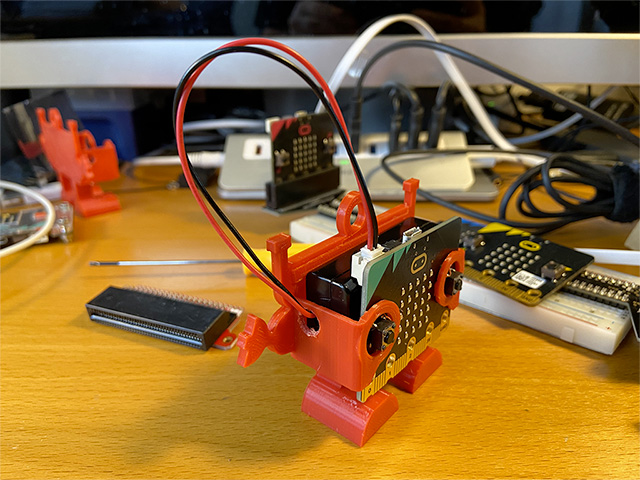
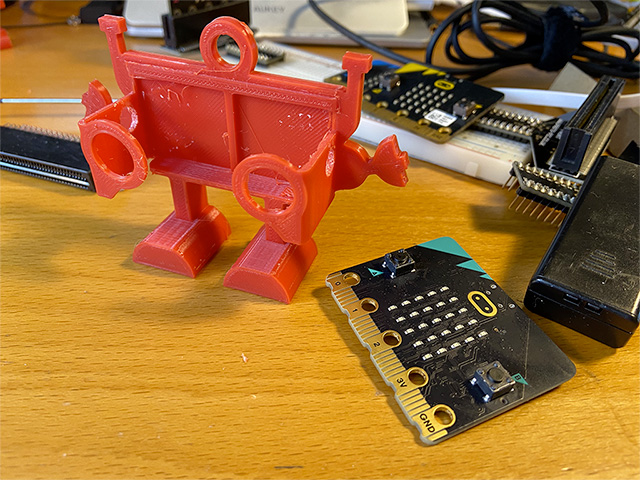
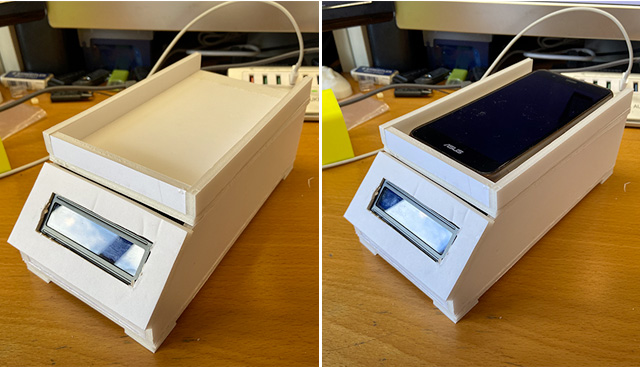
I progetti realizzati hanno avuto sviluppi molto interessanti, nelle foto in allegato trovare una versione addirittura dotata di caricatore per smartphone dotato inoltre di un doppio controllo: presenza persona (mediante sensore PIR) e rilevazione prelievo smartphone mediante sensore LDR. Come accade spesso i migliori progetti sviluppati durante il PCTO vengono utilizzati per sviluppare le future attività di laboratorio per l’anno scolastico successivo.
Una variante all’attività sopra segnalata è un misuratore di distrazione, l’idea nasce da una serie di necessità:
1. far percepire fisicamente la quantità di interruzioni e quindi distrazioni durante un’attività di studio dovute alle continue notifiche ricevute sugli smartphone;
2. usare concetti elettronici ed informatici non estremamente complessi ed adatti a chi inizia ad utilizzare un microcontrollore;
3. far si che nell’attività di laboratorio sia presente una componente di educazione civica.
Da ciò è nato il “misuratore di distrazioni” che proporrò per la realizzazione ad un gruppo di colleghi che stanno seguendo il mio corso: Le buone pratiche del Making e dell’Internet delle Cose (IOT avanzato) organizzato dal Liceo da Vinci – Floridia (SR), sarà il progetto della settimana.
Il sistema sarà dotato di pochi componenti:
- Arduino
- Ldr
- Display 16×2
- Pulsante
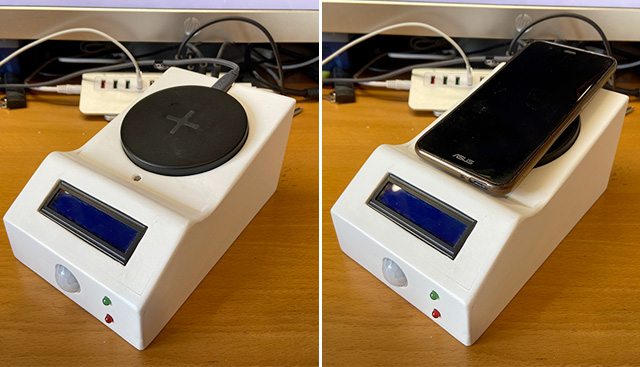
Il tutto si presenta come una semplice scatola su cui può essere poggiato il telefono, un LDR posto sulla base di appoggio rileverà la variazione di luce quando si solleva lo smartphone. Il display indicherà il numero di volte che il telefono è stato preso e quindi il numero di volte che la persona ha interrotto il suo lavoro o studio. Le distrazioni potranno essere ridotte inserendo un coperchio che nasconde il display dello smartphone.
Ovviamente si potrà migliorare il sistema, ad esempio mostrando la quantità di minuti trascorsi dall’ultima distrazione, o ancora il numero di minuti totali si distrazione, il progetto potrà essere migliorata a piacimento. Poiché durante il corso dovrò parlare anche di IoT si aggiungerà la possibilità di invio messaggi di avvertimento via Telegram nel caso si raggiunga un limite fissato di distrazioni.
Per rendere la costruzione del dispositivo semplice e veloce ho utilizzato del foam core in modo che non ci sia l’obbligo di utilizzo di una stampante 3D o di una macchina a taglio laser per la realizzazione dell’oggetto.
Rendo quindi disponibile i sorgenti grafici in formato svg per stampare su foglio di carta adesiva le parti della scatola. I fogli adesivi verranno poi incollati sui pannelli foam ed ogni parte sarà tagliata a mano con un cutter e successivamente incollati con colla vinilica.
Buon making a tutti 🙂
 Si conclude oggi il PCTO della mia 3B Automazione. Periodo didattico travagliato, fatto di mille intoppi dovuti a questa pandemia, alternanza tra didattica a distanza e in presenza, a settimane alterne e non. Un anno faticoso per i ragazzi e per noi docenti. Condurre il PCTO nelle varie classi è stato molto complicato, ma tra le classi che ho seguito anche la mia 3B Automazione ha concluso oggi il percorso.
Si conclude oggi il PCTO della mia 3B Automazione. Periodo didattico travagliato, fatto di mille intoppi dovuti a questa pandemia, alternanza tra didattica a distanza e in presenza, a settimane alterne e non. Un anno faticoso per i ragazzi e per noi docenti. Condurre il PCTO nelle varie classi è stato molto complicato, ma tra le classi che ho seguito anche la mia 3B Automazione ha concluso oggi il percorso.