Durante le mie attività di formazione più volte mi è giunta la richiesta da persone non professioniste del settore elettronico o informatico, la realizzazione di progetti elettronici in grado di interagire via WiFi. Svolgere tale attività può richiedere competenze di livello più elevato che ovviamente tutti possono acquisire, ma per non aggiungere scoraggiamento nella fase iniziale di apprendimento ed invogliare sempre di più a sperimentare progetti sempre più complessi è forse bene partire da qualcosa di semplice che sono sicuro farà “esplodere” la vostra fantasia 🙂
Per questa breve introduzione utilizzerò: Arduino IDE, Blynk con scheda WeMos D1 Mini
Blynk
Avevo fatto una breve segnalazione tempo fa. Blynk è un’applicazione (per dirla in informatiche meglio parlare di freamework) che consente mediante dispositivi mobili (iOS e Android) utilizzando un sistema completamente grafico la realizzazione dei propri widget per comandare ad esempio l’azionamento via WiFi di dispositivi di automazione industriale o implementare progetti di domotica, ma anche di rilevare grandezze fisiche esterne e visualizzarle direttamente sul vostro dispositivo mobile.
Blynk può interagire con Arduino o Raspberry Pi se connessi ad una WiFi o a moltissimi dispositivi basati su ESP8266, modulo WiFi dotato di Input/Output General Purpose e processore ARM. Attualmente sono disponibili una grande quantità di board basate su ESP identificate tutti da un ID da ESP-01 a ESP-13 e la differenza tra una scheda e l’altra dipende dalla quantità di memoria disponibile, il numero di GPIO e il tipo di antenna WiFi.
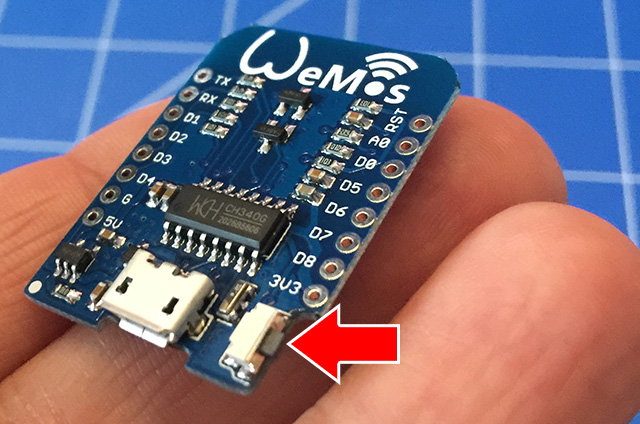
Wemos D1 Mini
Per darvi un’idea di cosa è la Wemos D1 Mini si potrebbe fare la seguente analogia (non me ne vogliano i puristi mi serve solo per dare l’idea per chi incomincia), immaginate un Arduino micro dotato di una connessione WiFi ad un costo di non più di € 5 che potrà essere programmato in modo grafico con Blynk oppure attraverso l’IDE Arduino o ancora con NodeMCU (vedremo più avanti).
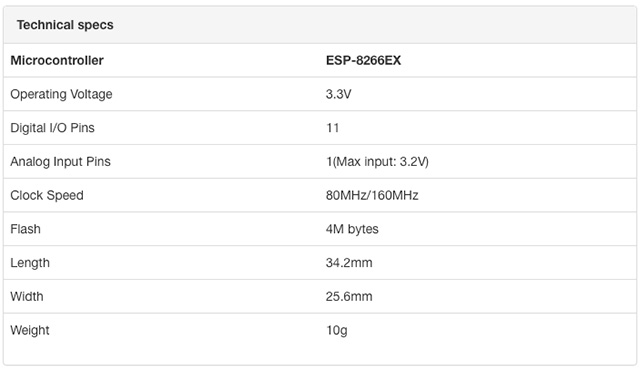
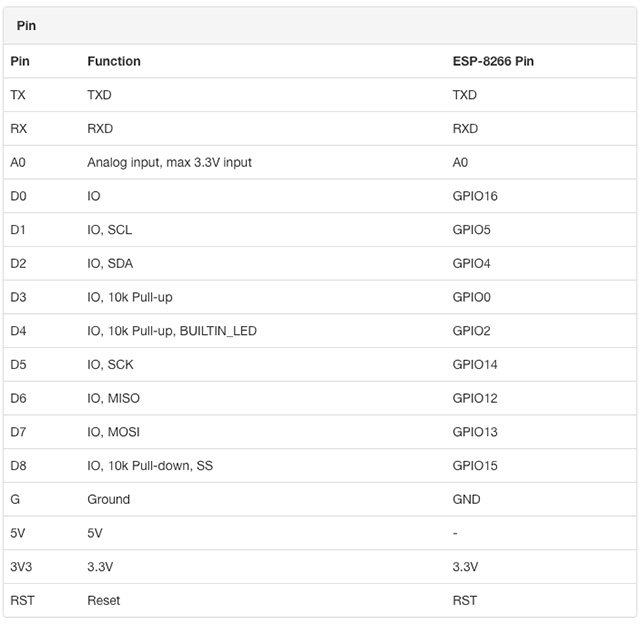
Wemos D1 Mini ospita un ESP-12F, dispone di 11 pin I/O digitali, 1 ingresso analogico, tutti i pin I/O gestiscono interrupt, pwm, I2C e ISP e tutti i pin I/O funzionano con una tensione di alimentazione di 3,3V e dispone di una memoria di 4MB.
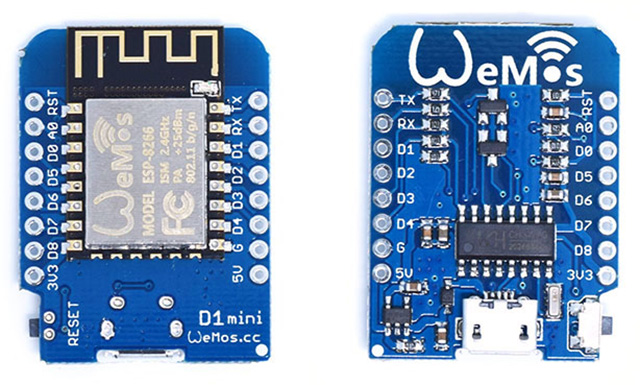
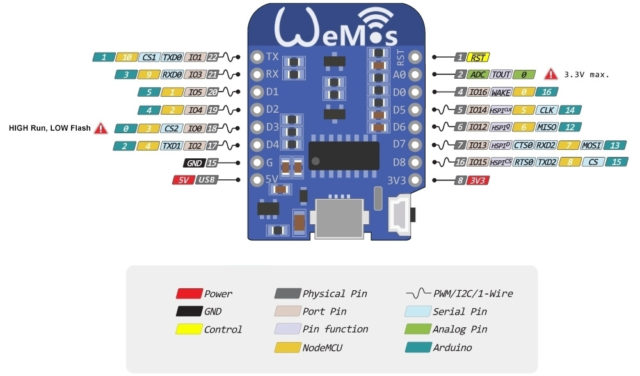
Nell’immagine sopra riportata noterete che il nome usato sulla scheda è diverso da quello utilizzato nell’IDE di Arduino, fate riferimento ai numeri scritti in verde in fase di programmazione.
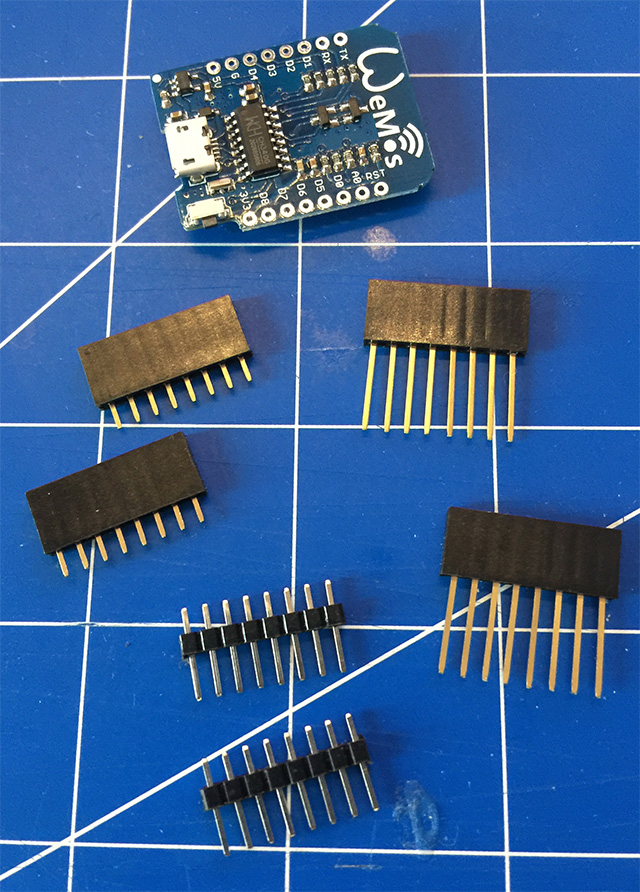
Come si evince dalle immagini sopra inserite la scheda è dotata di un connettore micro USB che vi permette di caricare gli sketch, ciò non accade per altre tipologie di schede che necessitano di un debugger per il caricamento di programmi.
On-line potete trovare su diversi store una serie di shield (per un elenco completo seguire il link) che possono esser impilati su questa piccolissima scheda.
 La scheda in genere viene venduta con diverse tipologie di pin header non saldati: maschio, femmina, femmina impilabile e ciò vi permette di adattarla ad ogni tipologia di circuito.
La scheda in genere viene venduta con diverse tipologie di pin header non saldati: maschio, femmina, femmina impilabile e ciò vi permette di adattarla ad ogni tipologia di circuito.
E’ presente un pulsante di reset
Sul pin analogico è possibile leggere tensioni fino a 3,2 V.
La conversione USB a UART viene realizzata dal chip CH340G (ben visibile nell’immagine sopra), presente su moltissimi cloni Arduino cinesi tra cui gli economicissimi Arduino nano. Gli utenti windows potranno procedere tranquillamente scaricando i driver dal seguente link su cui trovate anche i driver per MacOS X, però se avete l’ultima versione di MacOS X Sierra (10.12.x) utilizzate la procedura ben dettagliata a questo link. Sempre per gli utenti Mac, nel caso abbiate installato una precedente versione del driver seguite la procedura che trovate al seguente link.
Vedremo nei successivi passaggi l’utilizzo di WeMos D1 con l’Arduino IDE e con Blynk. Continua a leggere