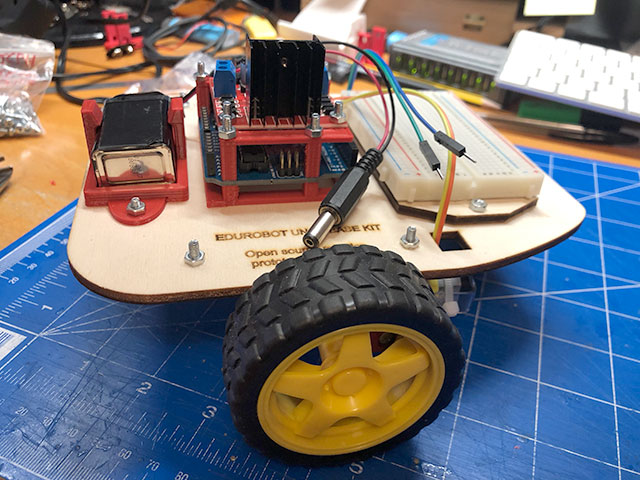
Al terzo anno, presso l’istituto dove attualmente lavoro, l’ITIS G.B. Pininfarina di Moncalieri (To), gli studenti svolgono un’attività di azienda simulata e per l’occasione, visto i tempi brevi di cui si dispone ho ripreso un progetto di qualche anno fa EduRobot (trovate i riferimenti seguendo il link), un kit robotico con struttura in legno a bassissimo costo che sviluppai come parte di un modulo di automazioni che svolsi in altra scuola.
L’idea è quella di simulare un’azienda che sviluppa e produce kit robotici per la didattica per l’insegnamento del Coding per gli studenti di scuola media. Gli studenti sulla base del kit che ho prodotto, dovranno costruirlo, programmarlo, pensare a soluzioni per migliorarlo sia dal punto di vista hardware che software, realizzare la manualistica e depliant pubblicitari in lingua inglese.
Questo manuale di lavoro vuole essere la guida per i miei allievi di 3A Automazione e 3B Automazione e per tutti coloro che intendono realizzare un robot.
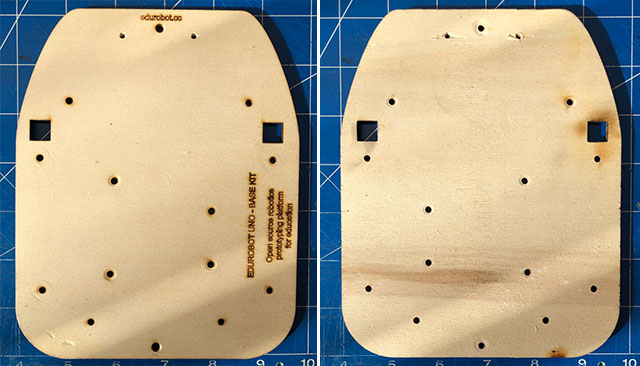
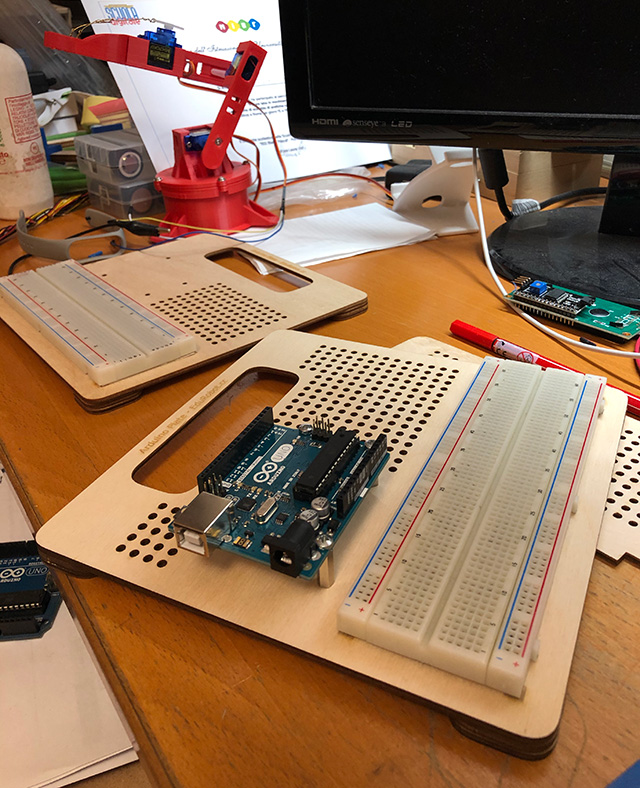
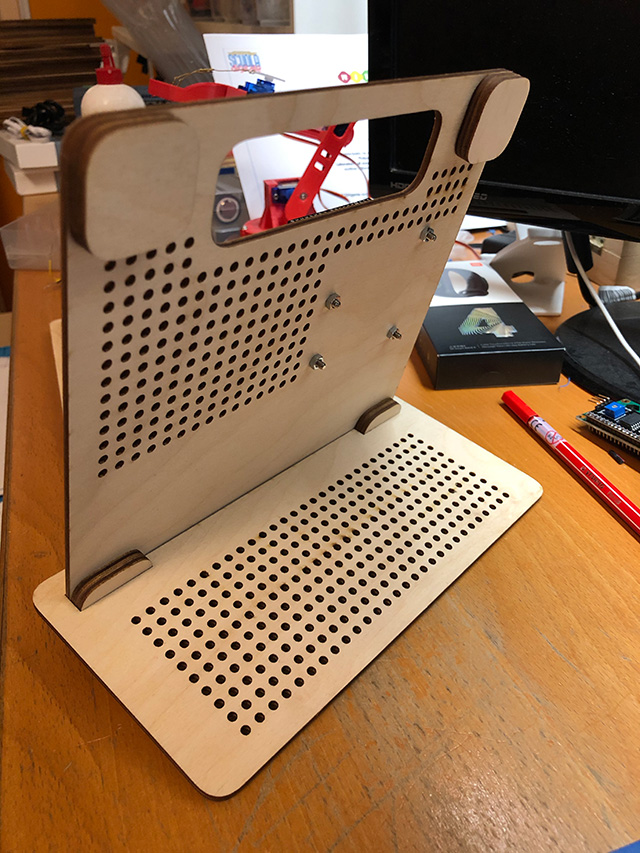
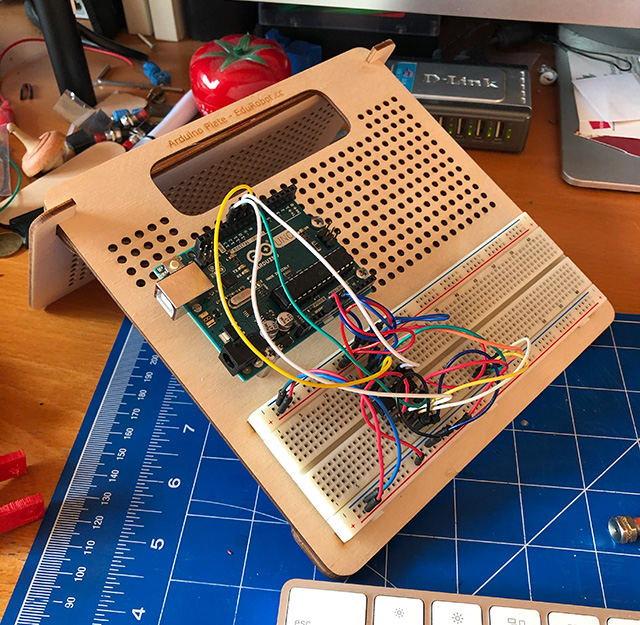
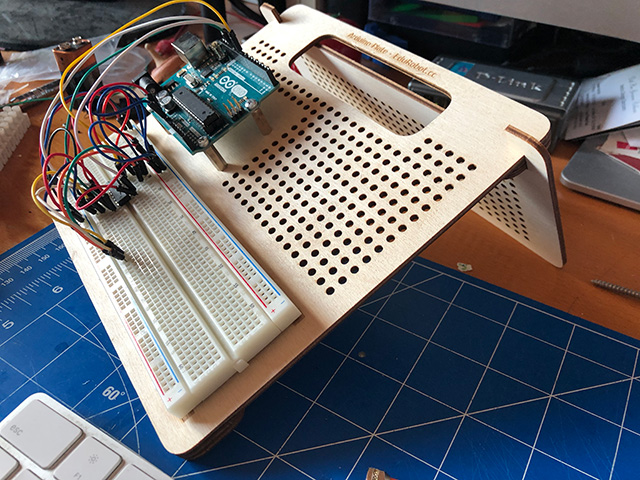
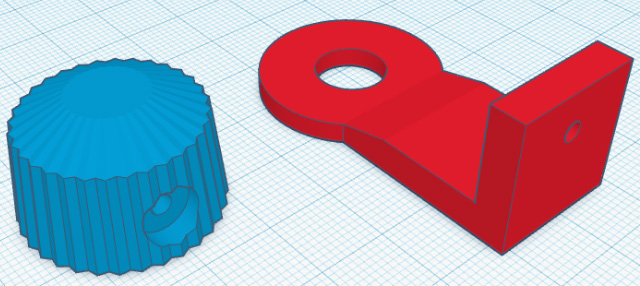
La struttura è costituita da un supporto in legno su cui collocare tutta l’elettronica, la struttura potrete realizzarla di qualsiasi altro materiale o forma in quanto gli elementi di base sono realizzati in 3D e si adattano a qualsiasi supporto, per recuperare il materiale precedente acquistato riutilizzerò la base di EduRobot.
Per chi desidera stampare gli elementi seguite il link alla pagina di Thingiverse dove ho reso disponibile tutti i file, troverete gli elementi che si adattano ad EduRobot e gli elementi generici che potrete usare per qualsiasi robot.
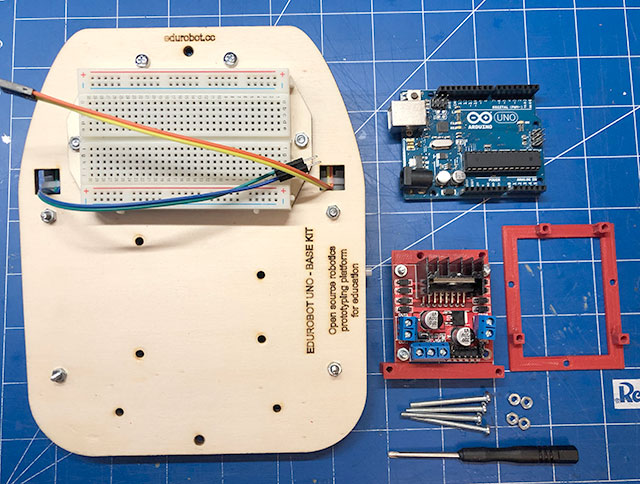
Per i miei allievi: tutti gli elementi sono stati già stampati e la breadboard è già fissata su un supporto in legno.
Nei file stl che trovate su Thingiverse ho aggiunto un il file: Supporti-Motori-Universale.stl da sostituire a Supporti-Motori-EduRobot.stl nel caso in cui voi non basate la vostra costruzione su EduRobot.
Nel prossimo futuro sostituirò la batteria di alimentazione da 9V con una batteria LiPo.
Il manuale è strutturato in 3 parti
- Manuale di costruzione (questa pagina)
- Manuale collegamenti elettrici
- Manuale di programmazione
Per i miei studenti del Pininfarina
- Tutta l’attività sarà valutata.
- Sarà fornito un kit già montato che dovrà essere condiviso tra la 3A Automazione e 3B Automazione in modo che, nel caso di dubbi, possiate usarlo come riferimento.
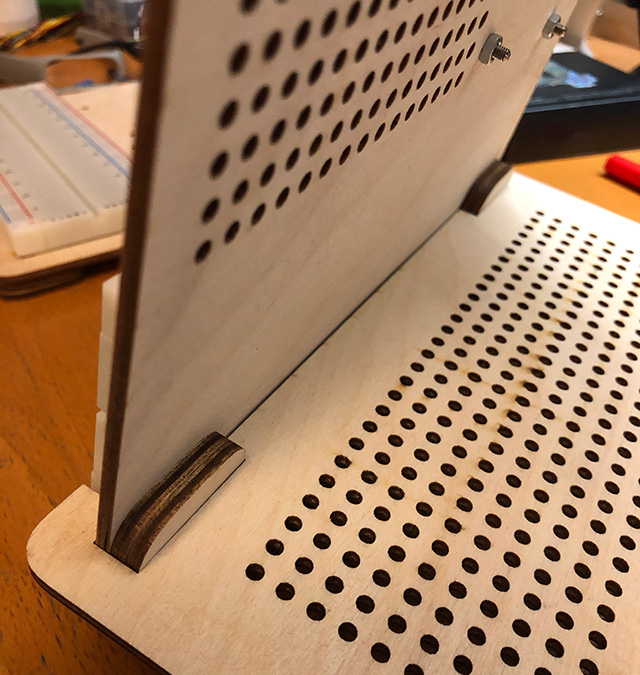
- Tutti gli elementi stampati in 3D dovranno essere fissati con delle viti metalliche. Ricordo a tutti di non forzare troppo il serraggio delle viti in quanto potreste rompere gli elementi stampati in 3D.
- Tutti gli elementi consegnati sono di proprietà del sottoscritto e poiché userò questi elementi anche in altre classi vi chiedo la massima cura nella gestione dei materiali, nel caso di problemi non esitate a contattarmi.
- Questa manualistica di assemblaggio sarà conservata nella sezione EduRobot di questo sito.
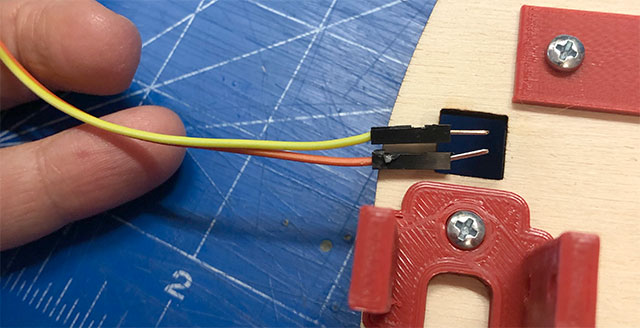
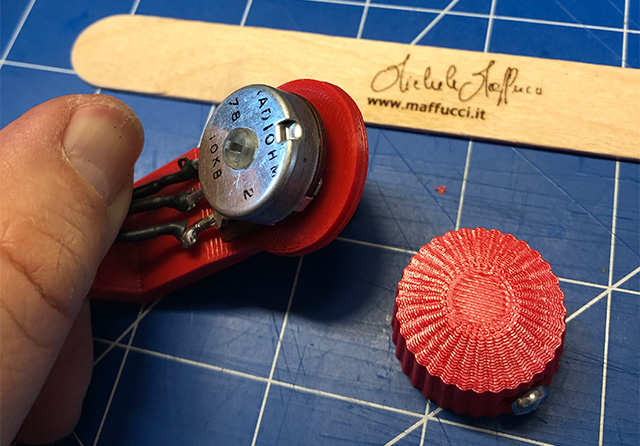
- Attenzione alla gestione dei motori! I cavi di collegamento sono saldati ai due poli del motore, questi sono estremamente delicati, per evitare rotture ho utilizzato una fascetta di plastica che dovrebbe evitare il distacco.
- Nella kit fornito aggiungerò un quantitativo di dadi e viti maggiore a quello realmente necessario, saranno tutti di misura M3.
- Non sono richiesti attrezzi aggiuntivi, all’interno del kit avete ha disposizione anche un piccolo cacciavite a stella sufficiente per la costruzione del robot, se preferite potete utilizzare anche gli strumenti disponibili in laboratorio.
- Nel caso di rotture di qualsiasi apparato comunicare tempestivamente al docente presente in aula e poi a me in modo da poter sostituire tempestivamente l’oggetto (ma spero ciò non accadrà 😉 ).
- Al termine di ogni lezione riporre all’interno del contenitore fornito tutti i semilavorati.
- Ogni scatola è numerata, su di essa è indicato il numero del gruppo e la classe.
- In ogni scatola troverete un piccolo contenitore dove riporre le minuterie.
- Ogni robot è numerato. Il numero del robot NON coincide con il numero della scatola.
- Non sono richieste saldature.
Procedimento
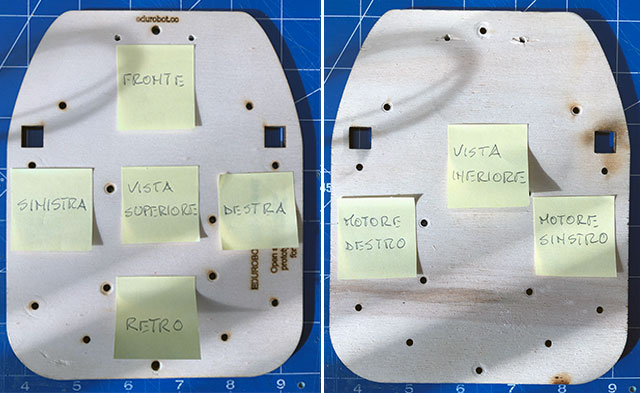
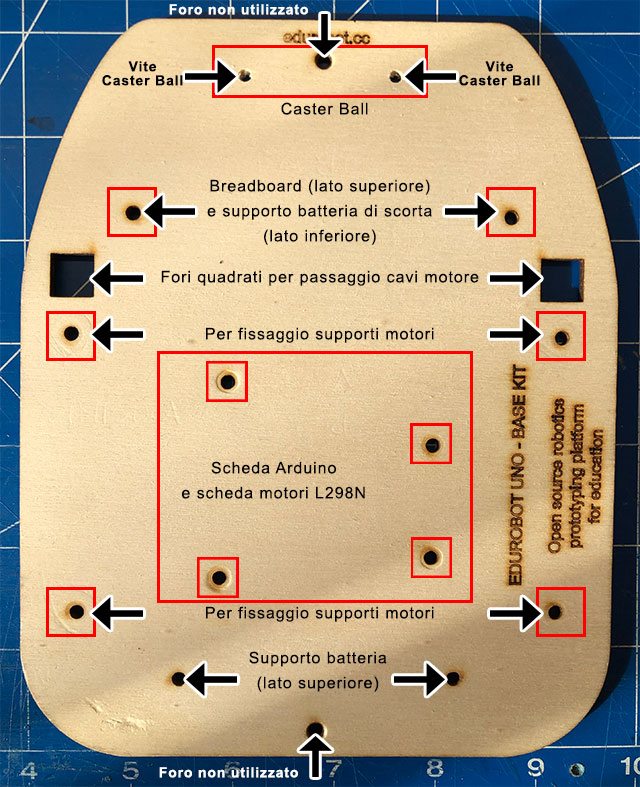
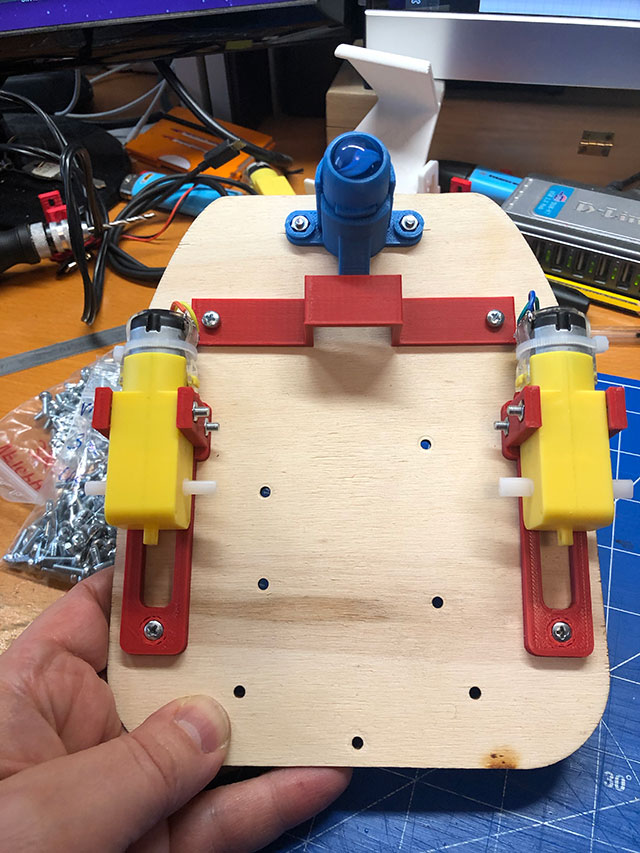
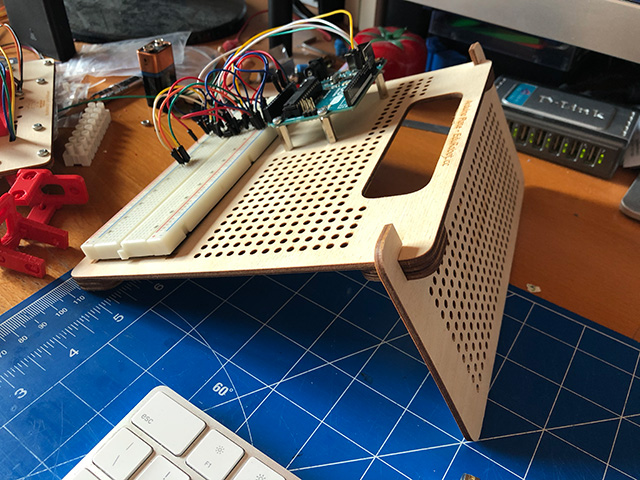
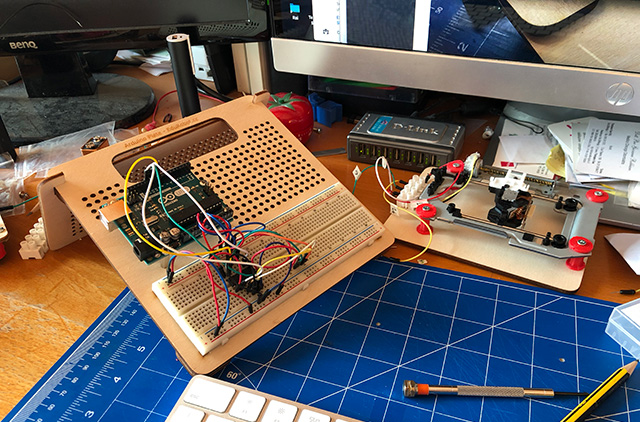
Orientamento del robot
Nelle spiegazioni si farà riferimento all’orientamento specificato nelle immagini che seguono:
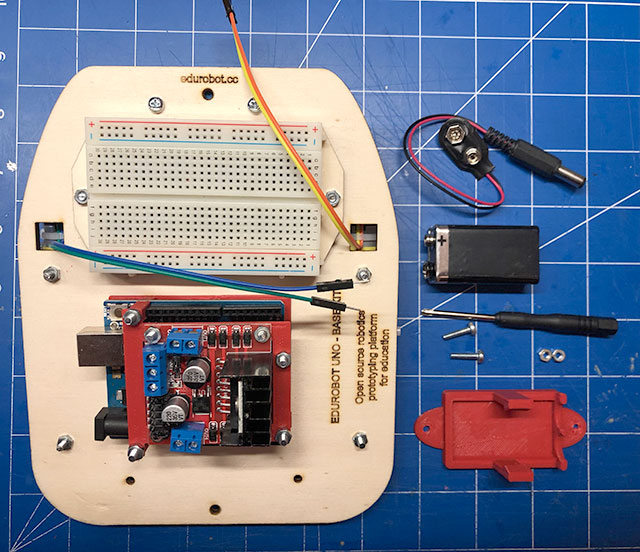
Passo 1
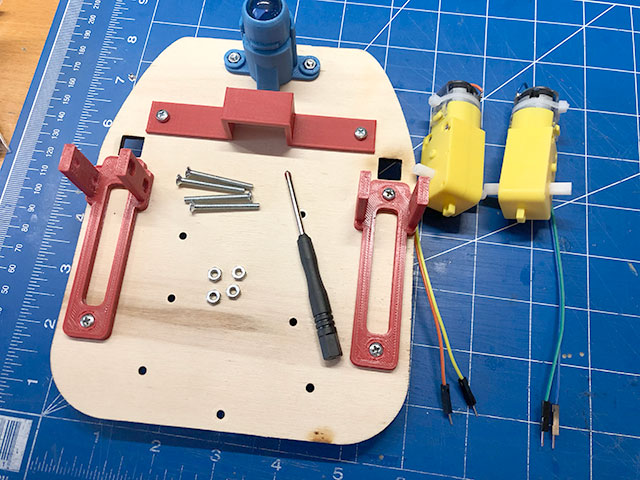
Per questa fase avrete bisogno di:
- breadboard
- alloggiamento batteria di scorta
- due dadi M3
- due viti M3 da 12 mm
- giravite a stella
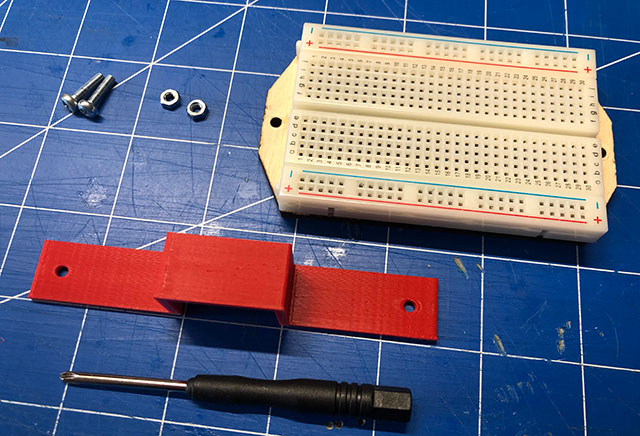
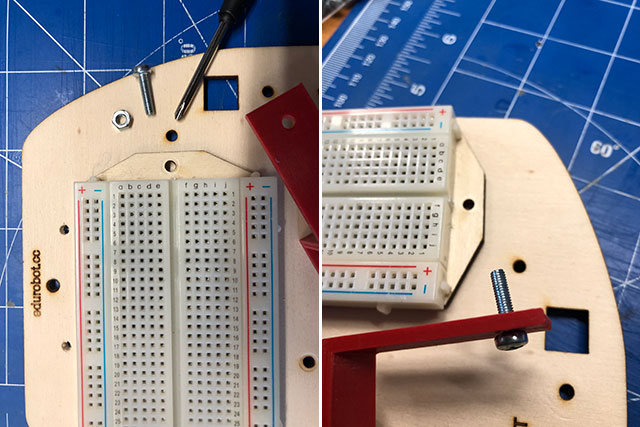
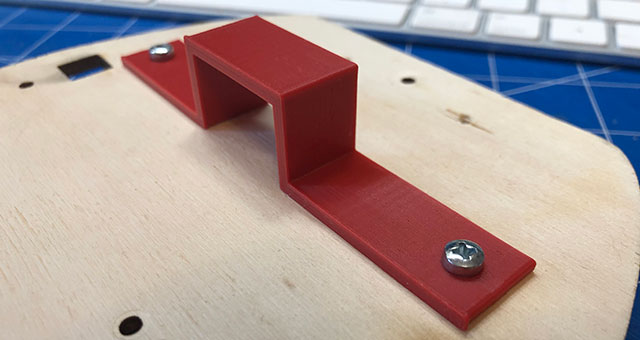
Fissare sulla basetta di compensato con due viti da 12 mm la breadboard (già fissata su basetta di legno) e l’alloggiamento per la batteria di riserva.

Passo 2
Per questa fase avrete bisogno di:
- caster ball
- due dadi M3
- due viti M3 da 10 mm
- giravite a stella

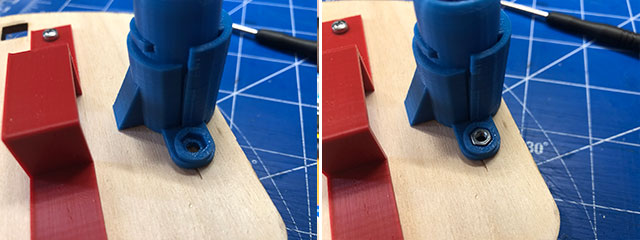
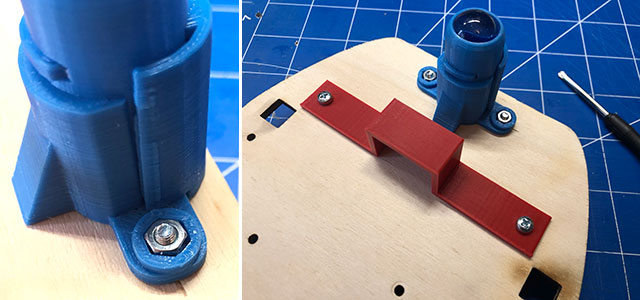
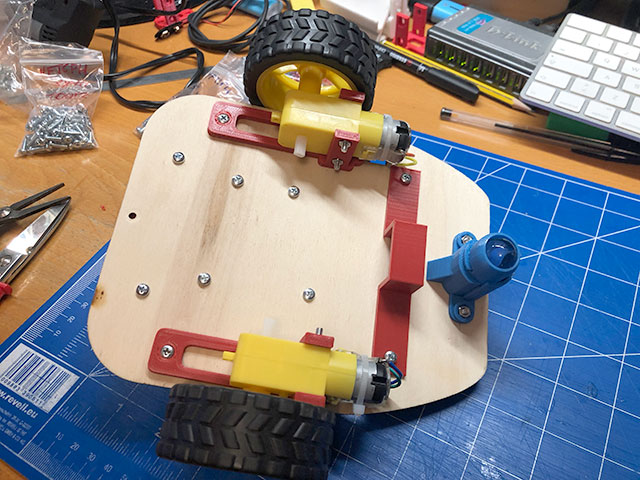
Fissare la caster ball facendo attenzione all’orientamento, l’elemento di rinforzo obliquo deve essere orientato come riportato in figura, i dadi M3 devono entrare nella sede della struttura della caster ball, serrare il tutto con viti da 10 mm.
Passo 3
Per questa fase avrete bisogno di:
- elementi realizzati al passo precedente
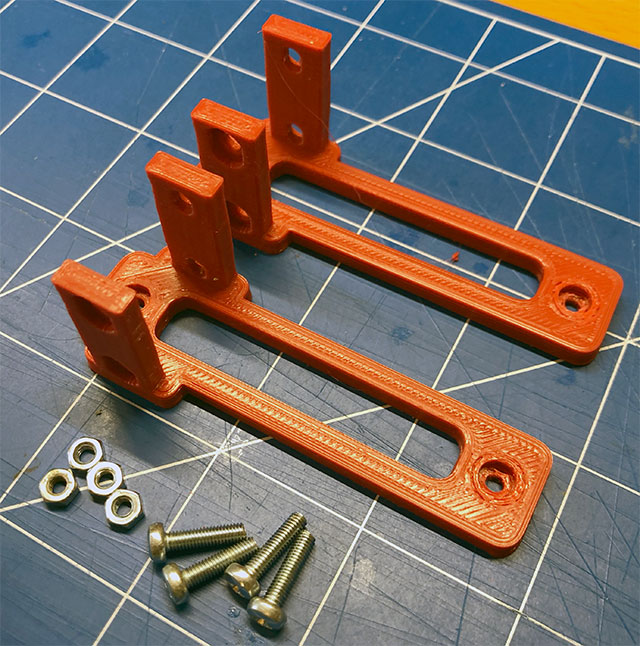
- due supporti motori
- quattro dadi M3
- quattro viti M3 da 12 mm
- giravite a stella
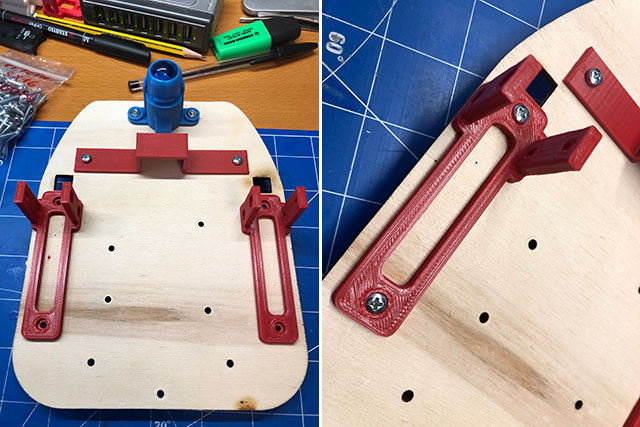
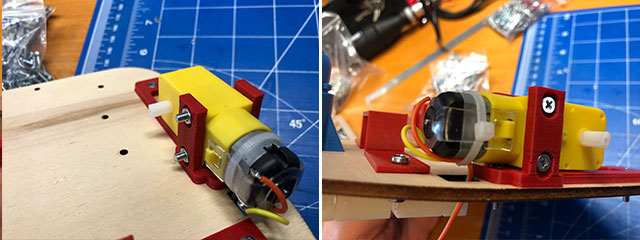
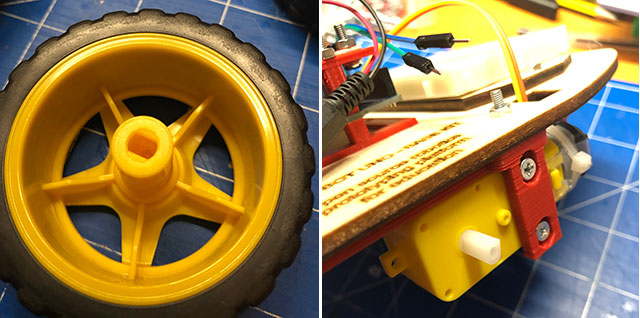
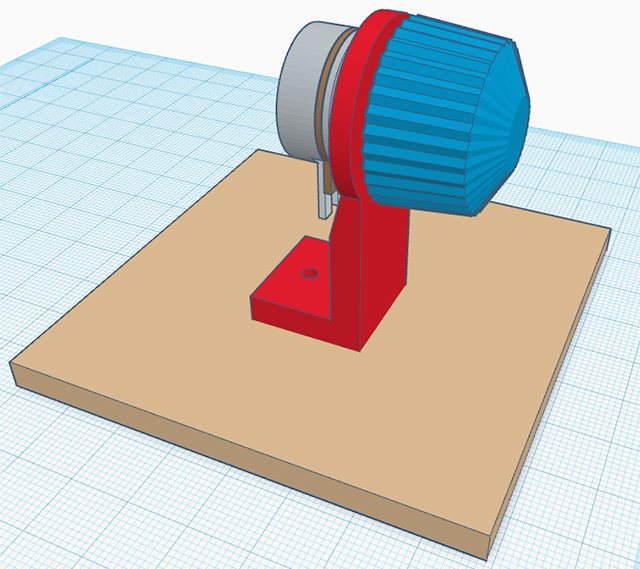
Fissare i motori alla basetta di compensato mantenendo la testa delle viti verso il lato inferiore del robot così come indicato nell’immagine.
Passo 4
Per questa fase avrete bisogno di:
- elementi realizzati al passo precedente
- due motori
- quattro dadi M3
- quattro viti M3 da 25 mm
- giravite a stella
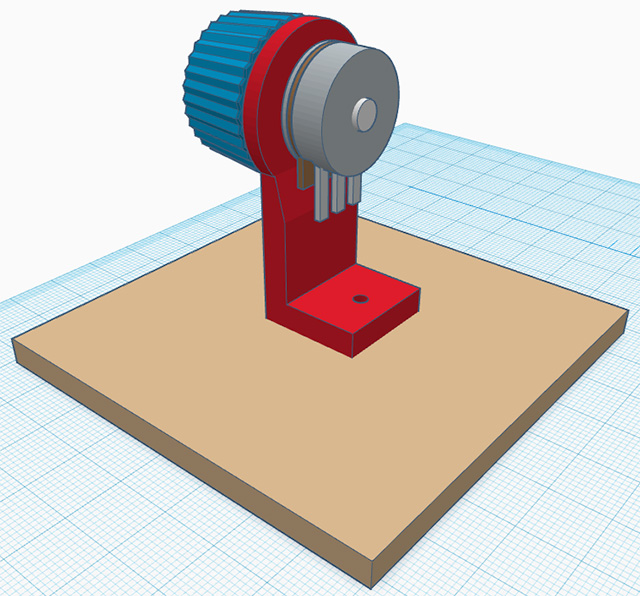
Fissare i motori ai supporti usando due viti da 25 mm. L’orientamento dei motori deve essere con i punti di saldatura dei fili verso l’interno della struttura, così come indicato nell’immagine che segue. Far passare i cavi dei motori attraverso i fori quadrati.

Passo 5
Per questa fase avrete bisogno di:
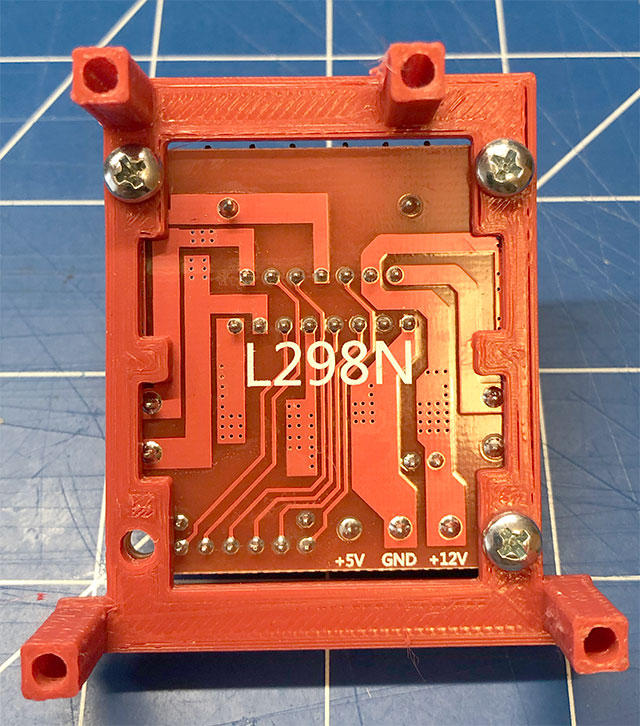
- scheda motori L298N
- supporto scheda motori
- 3 dadi M3
- 3 viti M3 da 10 mm
- giravite a stella
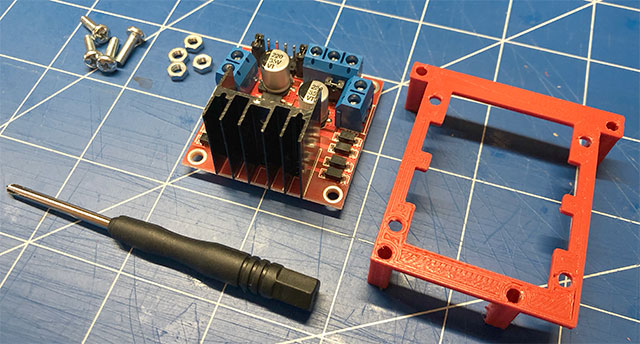
Avvitare la scheda motori L298N con 3 viti da 12 mm.
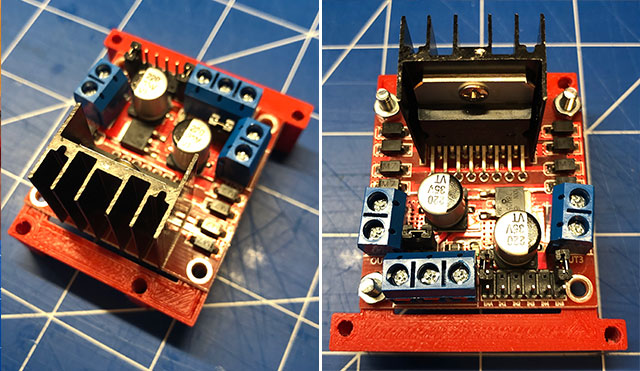
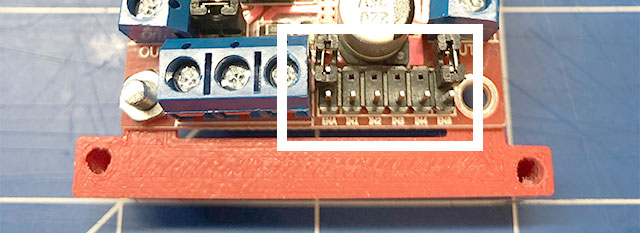
Verificate che i jumper siano disposti come rappresentati nell’immagine che segue:
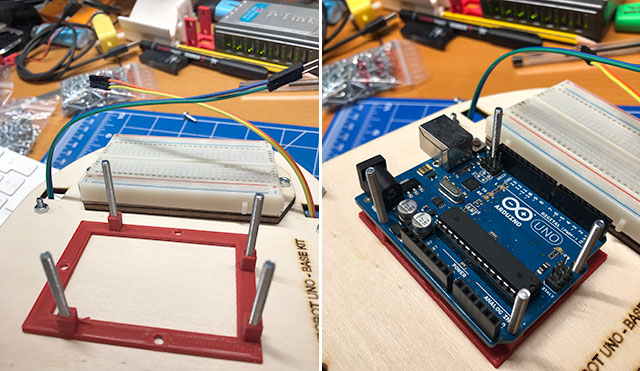
Passo 6
Per questa fase avrete bisogno di:
- elementi assemblati del passo precedente
- scheda Arduino
- supporto compensato
- 4 dadi M3
- 4 viti M3 da 35 mm
- supporto scheda Arduino
- giravite a stella
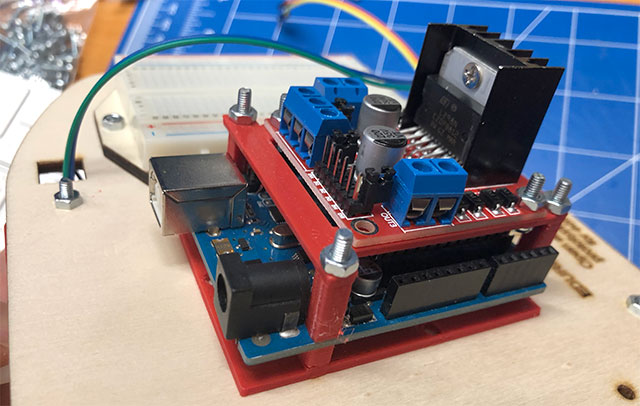
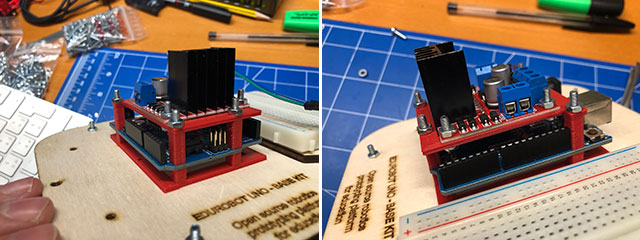
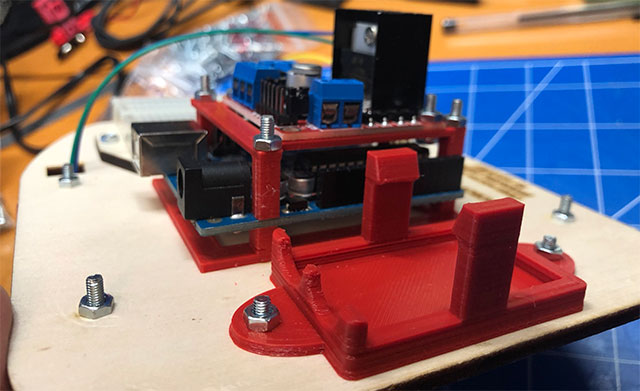
Sul lato superiore della basetta di compensato posizionare il supporto per la scheda Arduino ed inserire le 4 viti M3 da 35 mm e su di esso inserire la scheda L298N in modo da realizzare una struttura a sagwitch.
Passo 7
Per questa fase avrete bisogno di:
- elementi assemblati del passo precedente
- 2 dadi M3
- 2 viti M3 da 10 mm
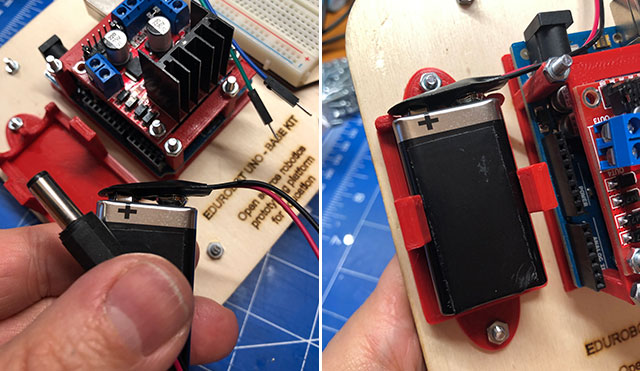
- batteria da 9V
- jack connessione batteria
- giravite a stella
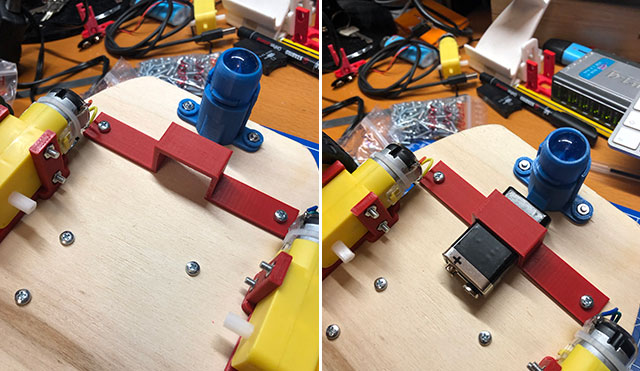
Avvitare con due viti da 10 mm l’alloggiamento per la batteria da 9V mantenendo i due svasi del supporto batteria verso il lato sinistro come indicato nell’immagine.
Passo 8
Per questa fase avrete bisogno di:
- elementi assemblati del passo precedente
- 2 ruote
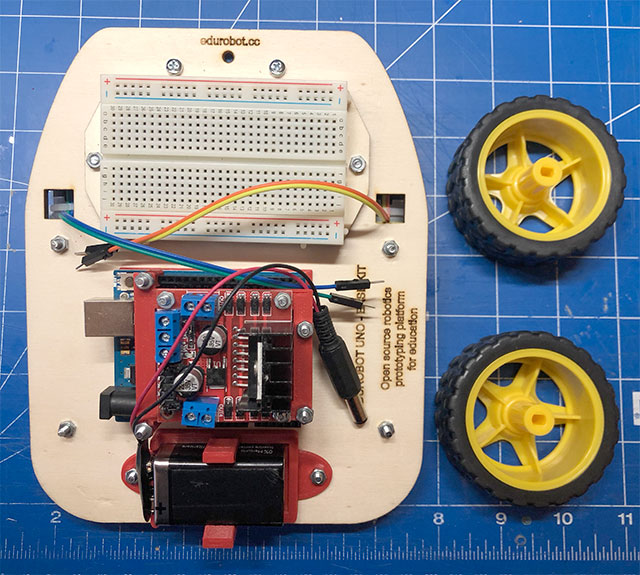
Inserire le ruote. Fate attenzione! Non spingete con forza. Il profilo del foro e del mozzo sono costituiti da un mozzo smussato è l’inserimento può avvenire in un solo modo.
Passo 9
Per questa fase avrete bisogno di:
- elementi assemblati del passo precedente
- batteria 9V di riserva
Inserire la batteria aggiuntiva nella sede al di sotto del robot. Questa batteria servirà inoltre per appesantire il robot nella parte anteriore ed evitare che in accelerazione il robot si alzi anteriormente.
Buon lavoro 🙂

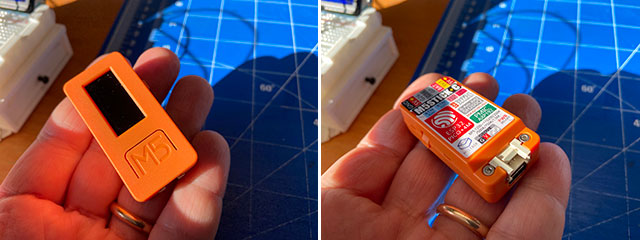




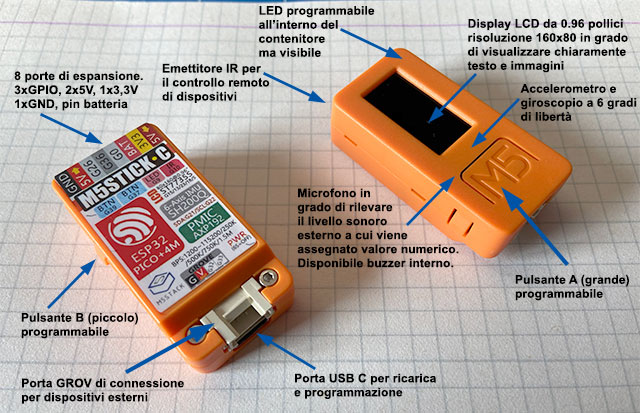








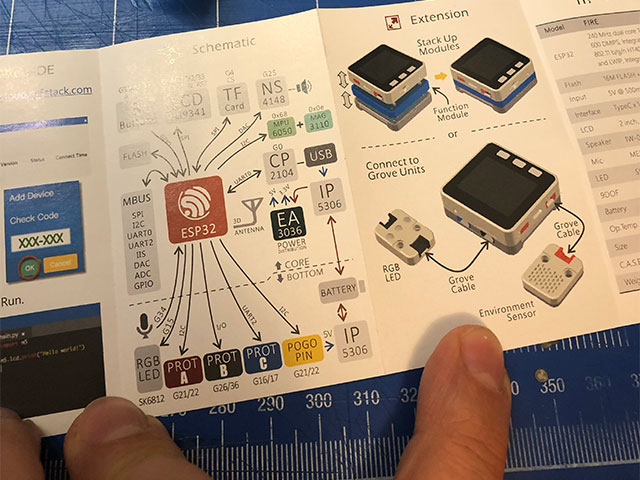
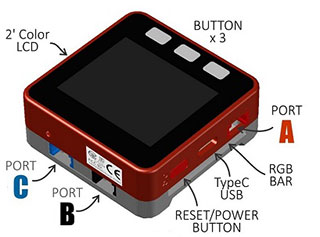 M5Stack Fire è costituito da tre unità separabili. Nell’unità superiore è alloggia tutta l’elettronica principale, l’ESP32, l’antenna 2.4G, l’elettronica per la gestione dell’alimentazione, schermo LCD touch. La parte centrale è chiamata base M5GO, all’interno trova posto una batteria al litio, una presa M-BUS, due strisce LED RGB e altre due porte GROVE. La parte inferiore è adibita alla ricarica, può essere collegata alla base M5GO tramite pin POGO. All’interno dell’M5Stack si trova anche una IMU in grado di fornire la posizione nello spazio del dispositivo.
M5Stack Fire è costituito da tre unità separabili. Nell’unità superiore è alloggia tutta l’elettronica principale, l’ESP32, l’antenna 2.4G, l’elettronica per la gestione dell’alimentazione, schermo LCD touch. La parte centrale è chiamata base M5GO, all’interno trova posto una batteria al litio, una presa M-BUS, due strisce LED RGB e altre due porte GROVE. La parte inferiore è adibita alla ricarica, può essere collegata alla base M5GO tramite pin POGO. All’interno dell’M5Stack si trova anche una IMU in grado di fornire la posizione nello spazio del dispositivo.