
In queste settimane i miei studenti stanno svolgendo una serie di esercitazioni in cui è necessario controllare la rotazione di un motore passo passo (stepper). L’obiettivo delle esercitazioni è quello di simulare il sistema di controllo di un forno a microonde e lo stepper viene utilizzato per la rotazione del piatto.
In un precedente articolo ho dettagliato il principio di funzionamento di questa tipologia di motori, in questo post ne riassumo le principali caratteristiche e condivido alcuni esempi che sono di base per la realizzazione delle sperimentazioni svolte per il laboratorio di TPSEE e Sistemi.
Richiami
Il vantaggio principale rispetto ad un motore brushed (a spazzola) in corrente continua e di un servomotore e che l’albero di rotazione di uno stepper può essere posizionati con precisione, spostandolo in avanti o all’indietro di un “passo” alla volta, ma possono anche ruotare continuamente.
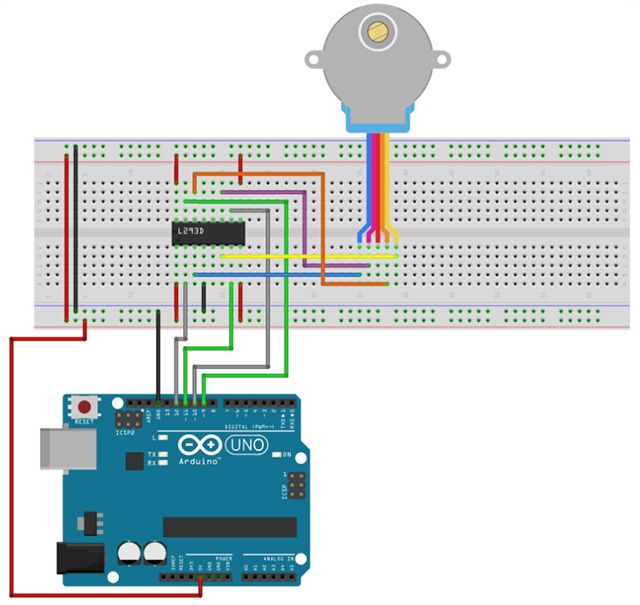
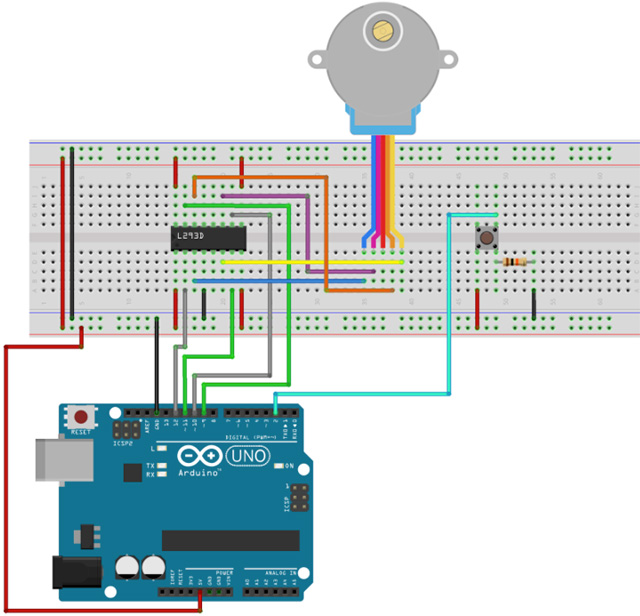
In questa lezione verrà mostrato come controllare un motore passo-passo utilizzando Arduino ed un ponte H L293D, lo stesso utilizzato per controllare un motore a spazzola come quelli utilizzati in molti dei kit robotici che trovate sia questo sito.
Caratteristiche principali di uno stepper
- La differenza sostanziale da un motore brushed in corrente continua risiede nel fatto che un motore passo passo mantiene la velocità di rotazione costante anche con un carico applicato, ovvero se sottoposti a sforzo mantengono velocità costante. Questa caratteristica consente di evitare sistemi di controreazione, utilizzando ad esempio degli encoder, per il mantenimento costante della velocità.
- i motori passo passo erogano coppie elevate anche a basso numero di giri.
- accelerazioni e frenate repentine
- mantenimento del carico fermo e senza vibrazioni
Difetti
- E’ necessario utilizzare un circuito elettrico di pilotaggio
- rendimento energetico basso
- velocità di rotazione ridotta
- costo di acquisto elevato
Per le caratteristiche tecniche, il principio di funzionamento e le modalità di connessione vi rimando all’articolo: Controllo di un motore passo-passo bipolare NEMA17 con Driver L298N
Negli sketch di esempio che troverete in questo articolo prendo in considerazione 3 tipologie di stepper: i piccoli stepper dei CD-ROM e dei DVD dei computer, 28BYJ-48 comuni in molti kit Arduino, e i NEMA 17.
Negli sketch di esempio che troverete in questo articolo prendo in considerazione 3 tipologie di stepper: i micro stepper dei CD-ROM e dei DVD dei computer, i 28BYJ-48 comuni in molti kit Arduino, e i nema 17.
Negli sketch troverete alcune parti commentate, togliendo il commento ad alcune linee di codice, potrete impostare il funzionamento per una delle tre tipologie di stepper.
Una delle attività svolte nello scorso anno scolastico dai miei allievi è stato il recupero di tutti gli stepper dei vecchi pc alienati della scuola, ciò mi ha permesso di realizzare velocemente tutta una serie di esercitazioni sull’uso dei motori passo passo.

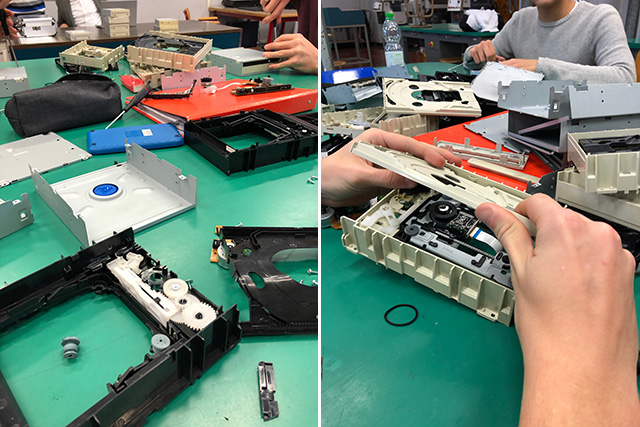
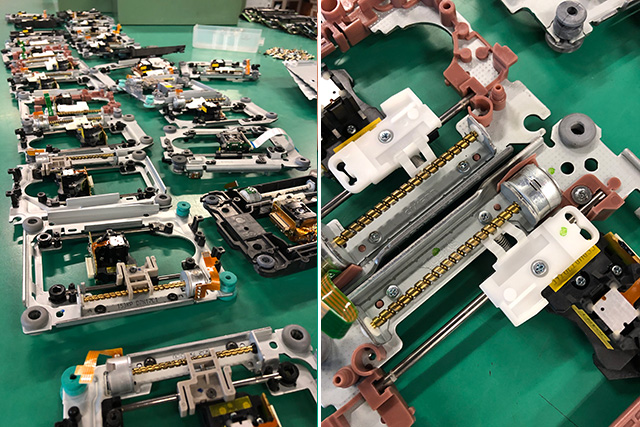
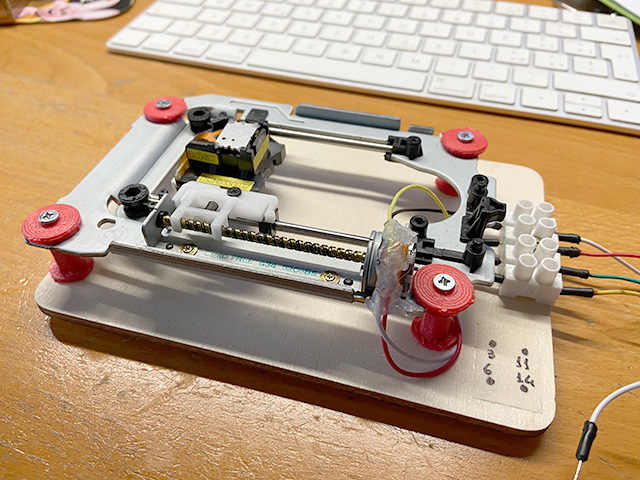
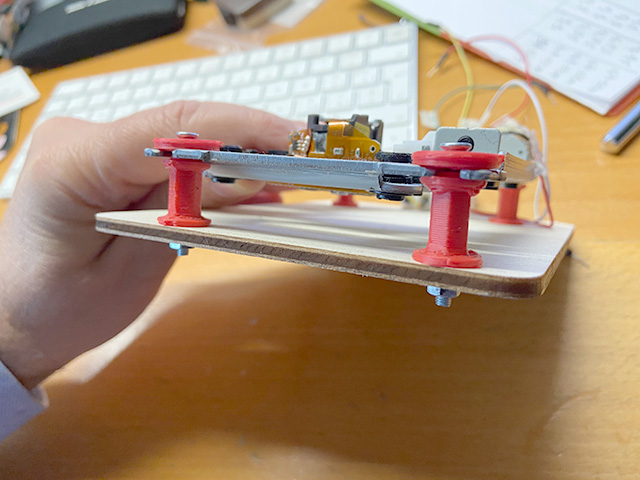
Gli tutti gli stepper recuperati sono stati posti su supporti stampati in 3D e fissati su basette di compensato. L’utilizzo degli stepper dei CD-ROM consente inoltre di realizzare attività di progetto interessanti, come ad esempio piccoli plotter oppure dei laser engraver.
Raccomandazioni per i miei studenti
Punto 1
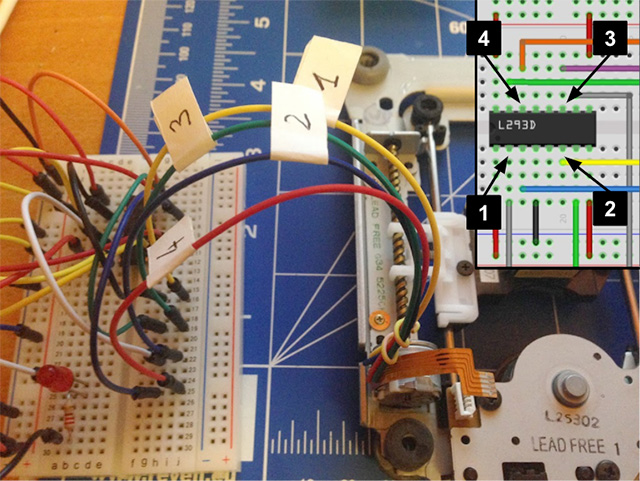
Ricordate di individuare le bobine di un motore passo passo, l’operazione è un po’ difficoltosa per i passo passo dei CD-ROM che in genere non sono identificati da colori o dalla posizione.
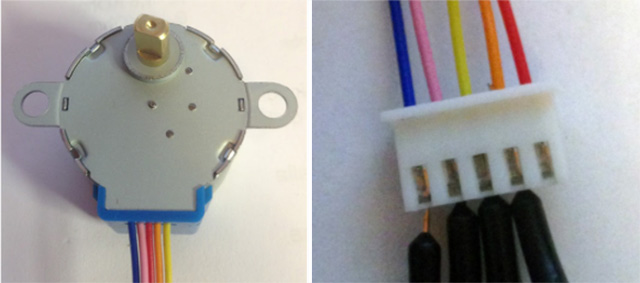
Prima di collegare il motore alla scheda motori è necessario individuare i cavi A+, A-, B+ e B- sul motore. La maniera migliore è quella di consultare la scheda tecnica del motore in cui vi è una corrispondenza tra colore filo e cavo. In alternativa potete utilizzare un multimetro in modalità ohmmetro e misurare la resistenza tra le coppie dei cavi, quando misurerete un valore tra i 2 e i 4 ohm tra due terminali avrete individuato una delle bobine.
Punto 2
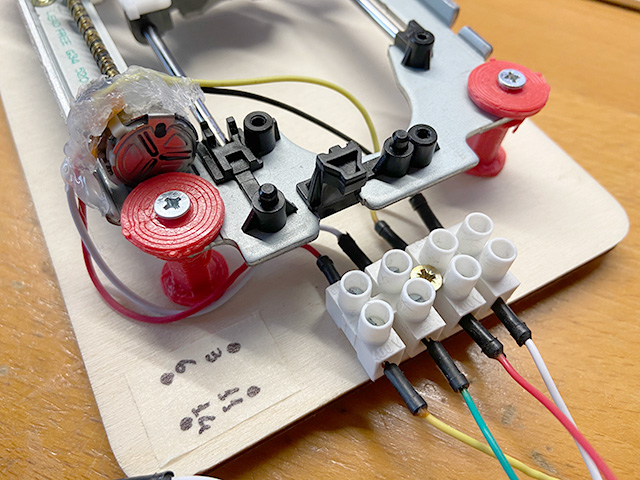
Sempre per i passo passo dei CD-ROM i fili di collegamento sono saldati al motore ed il punto di saldatura è molto piccolo, inoltre i fili di collegamento sono sottili è molto alto il rischio di romperli. Per evitare ciò ho utilizzato una strategia semplice ed economica, un ponte con un mammut su cui collego poi i fili che vanno ad essere collegati alla breadboard, così come rappresentato nell’immagine.
Punto 3
La spiegazione del funzionamento di ogni sketch è dettagliata con commenti nello sketch e tutti gli esempi sono da considerare come base di partenza per le esercitazioni svolte in presenza.
Esempio 1
Controllo rotazione stepper da Serial Monitor mediante tastiera. Valori positivi rotazione oraria, valori negativi rotazione antioraria
// Prof. Michele Maffucci
// 20.10.2020
// Controllo rotazione stepper mediante tastiera
// valori positi rotazione oraria
// valori negativi rotazione antioraria
#include <Stepper.h>
int in1Pin = 12;
int in2Pin = 11;
int in3Pin = 10;
int in4Pin = 9;
/*
in1 L293D - pin 12 Arduino
in1 L293D - pin 11 Arduino
in1 L293D - pin 10 Arduino
in1 L293D - pin 9 Arduino
*/
// 200 per stepper 17PM-M041-P1 - 12 V - 1,8 gradi per step
// 200 per microstepper CDROM - 5 V - 1,8 gradi per step
// per evitare che slitti sul supporto impostare 170 come limite massimo
// 512 per stepper 28BY J-48 - 5 V - 5,525 gradi per step
// per questo stepper il valore passato non e' step/giro
// per un giro completo 2048 step. 512 equivale ad 1/4 di giro
// inizializzazione della libreria Stepper
const int stepPerGiro = 200; // adattare al passo di rotazione del vostro stepper
Stepper myStepper(stepPerGiro, in1Pin, in2Pin, in3Pin, in4Pin);
void setup()
{
pinMode(in1Pin, OUTPUT);
pinMode(in2Pin, OUTPUT);
pinMode(in3Pin, OUTPUT);
pinMode(in4Pin, OUTPUT);
Serial.begin(9600);
// rotazioni per minuto, funzione dello stepper a disposizione
// e' un valore positivo.
// la funzione setSpeed non fa ruotare il stepper, imposta solamente la velocita'
myStepper.setSpeed(70); // imposta la velocita' di rotazione a 20 rpm:
}
void loop()
{
if (Serial.available())
{
int steps = Serial.parseInt();
// valori positivi fanno girare il mySteppere in senso orario
// valori negativi fanno girare il mySteppere in senso antioraio
myStepper.step(steps);
}
}
Esercizio 2
Realizzare uno sketch che permetta di contare il numero di passi di rotazione fissato il numero di step per passo. Si evidenzi il raggiungimento di un passo con l’accensione di un LED.
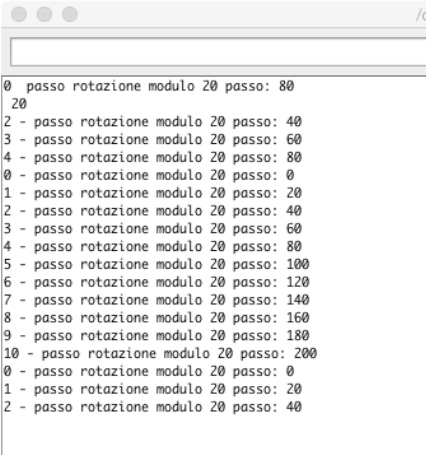
Si visualizzi sulla serial monitor il messaggio:
“PASSO” – passo rotazione modulo “MODULO” passo: “CONTATORE STEP”
sono variabili:
“PASSO”,
“MODULO”
“CONTATORE STEP”
Nell’esempio:
PASSO: numero sequenziale
MODUOLO: step per passo
CONTATORE STEP: modulo del passo
// Prof. Michele Maffucci
// 20.10.2020
// contatore passi
// il programma puo' pilotare stepper unipolari o bipolari
// il numero di passi fissato nella variabile moduloStep
// ad ogni passo viene rilevato anche da un LED
// 200 per stepper 17PM-M041-P1 - 12 V - 1,8 gradi per step
// 200 per microstepper CDROM - 5 V - 1,8 gradi per step
// per evitare che slitti sul supporto impostare 170 come limite massimo
// 512 per stepper 28BY J-48 - 5 V - 5,525 gradi per step
// per questo stepper il valore passato non e' step/giro
// per un giro completo 2048 step. 512 equivale ad 1/4 di giro
#include <Stepper.h>
const int stepPerGiro = 170; // adattare al passo di rotazione del vostro stepper
// inizializzazione della libreria Stepper
Stepper myStepper(stepPerGiro, 12, 11, 10, 9);
int contatorePassi = 0; // numero di step raggiunto
int moduloStep = 20; // modulo rotazione stepper da 1 a numero massimo di passi
// se moduloStep = 1 diventa un contatore di step
int conta = 0; // conteggio fase
int ledPin = 7; // led rilevamento fase
void setup() {
// inizializzazione porta seriale
Serial.begin(9600);
// imposta la velocita' di rotazione a 20 rpm
myStepper.setSpeed(20);
pinMode(ledPin, OUTPUT);
}
void loop() {
// passi di rotazione
myStepper.step(moduloStep);
Serial.print(conta);
Serial.print(" - ");
Serial.print("passo rotazione modulo ");
Serial.print(moduloStep);
Serial.print(" ");
Serial.print("passo: ");
Serial.println(contatorePassi);
digitalWrite(ledPin, HIGH);
conta++;
contatorePassi=contatorePassi+moduloStep;
if (contatorePassi &gt; stepPerGiro){
contatorePassi = 0;
conta = 0;
}
delay(500);
digitalWrite(ledPin, LOW);
}
Variante per stepper 28BY J 48
// Prof. Michele Maffucci
// 20.10.2020
// contatore passi
// il programma puo' pilotare stepper unipolari o bipolari
// il numero di passi fissato nella variabile moduloStep
// ad ogni passo viene rilevato anche da un LED
// in questo sketch si puo' effettuare le dovute correzioni per lo stepper
// 28BY J-48
// 200 per stepper 17PM-M041-P1 - 12 V - 1,8 gradi per step
// 200 per microstepper CDROM - 5 V - 1,8 gradi per step
// per evitare che slitti sul supporto impostare 170 come limite massimo
// 512 per stepper 28BY J-48 - 5 V - 5,525 gradi per step
// per questo stepper il valore passato non e' step/giro
// per un giro completo 2048 step. 512 equivale ad 1/4 di giro
#include <Stepper.h>
const int stepPerGiro = 512; // adattare al passo di rotazione del vostro stepper
const int BY = 1; // 1 uso di BY - 0 uso di altro motore passo passo
// inizializzazione della libreria Stepper
Stepper myStepper(stepPerGiro, 11, 9, 10, 8);
int contatorePassi = 0; // numero di step raggiunto
int moduloStep = 512; // modulo rotazione stepper da 1 a numero massimo di passi
// se moduloStep = 1 diventa un contatore di step
int conta = 0; // conteggio fase
int ledPin = 13; // led rilevamento fase
void setup() {
// inizializzazione porta seriale
Serial.begin(9600);
// imposta la velocita' di rotazione a 20 rpm
myStepper.setSpeed(70);
pinMode(ledPin, OUTPUT);
}
void loop() {
// passi di rotazione
myStepper.step(moduloStep);
Serial.print(conta);
Serial.print(" - ");
Serial.print("passo rotazione ");
Serial.print("modulo ");
Serial.print(moduloStep);
Serial.print(" ");
Serial.print("passo: ");
Serial.println(contatorePassi);
digitalWrite(ledPin, HIGH);
contatore();
delay(500);
digitalWrite(ledPin, LOW);
}
// funzione che conta i passi in funzione dello stepper utilizzato
void contatore() {
conta++;
contatorePassi = contatorePassi + moduloStep;
switch (BY) {
case 0:
if (contatorePassi &gt; stepPerGiro) {
contatorePassi = 0;
conta = 0;
}
break;
case 1:
if (contatorePassi &gt; stepPerGiro * 4) {
contatorePassi = 0;
conta = 0;
}
break;
}
}
Esempio 3
Realizzare uno sketch che permetta di far compiere in modo continuo un giro completo in senso orario ed uno in senso antiorario.
Svolgere l’esercizio sia con lo stepper 28BY J-48 che con il microstepper del CDROM
Noterete che per il microstepper del CDROM il carrello giunto alla fine slitta, in quanto 200 step per rotazione sono troppi. Valutare (in modo empirico) quanti stemp sono necessari affinche il carrello non slitti e modificare lo sketch di conseguenza.
Variante 1
Fare in modo che al completamento di un giro venga acceso un diodo LED
Variante 2
Utilizzando il microstepper fare in modo che il verso di spostamento della slitta sia segnalato da due LED ed i LED siano accesi in modo alternato in funzione del verso di scorrimento della slitta
-
- Direzione 1 – LED rosso acceso, LED verde spendo
- Direzione 2 – LED rosso spento, LED verde acceso
// Prof. Michele Maffucci
// 20.10.2020
// rotazione oraria e antioraria sequenziale
/*
in1 L293D - pin 12 Arduino
in1 L293D - pin 11 Arduino
in1 L293D - pin 10 Arduino
in1 L293D - pin 9 Arduino
*/
// 200 per stepper 17PM-M041-P1 - 12 V - 1,8 gradi per step
// 200 per microstepper CDROM - 5 V - 1,8 gradi per step
// per evitare che slitti sul supporto impostare 170 come limite massimo
// 512 per stepper 28BY J-48 - 5 V - 5,525 gradi per step
// per questo stepper il valore passato non e' step/giro
// per un giro completo 2048 step. 512 equivale ad 1/4 di giro
#include <Stepper.h>
const int stepPerGiro = 170; // adattare al passo di rotazione del vostro stepper
// inizializzazione della libreria Stepper
Stepper myStepper(stepPerGiro, 12, 11, 10, 9);
void setup() {
// inizializzazione porta seriale
Serial.begin(9600);
// imposta la velocita' di rotazione a 60 rpm:
myStepper.setSpeed(60);
}
void loop() {
// un giro completo in senso orario
Serial.println("antiorario");
myStepper.step(stepPerGiro);
delay(500);
// un giro completo in senso antiorario
Serial.println("orario");
myStepper.step(-stepPerGiro);
delay(500);
}
Esempio 4
Realizzare uno sketch che permetta di far cambiare il senso di rotazione alla pressione di un pulsante.
Rilevare la pressione del pulsante con l’accensione del LED collegato al pin 13.
Si colleghi il pulsante al pin 2 di Arduino, secondo quanto specificato nello schema di seguito. Utilizzare per questo esercizio il microstepper.
// Prof. Michele Maffucci
// 20.10.2020
// Cambio direzione rotazione alla pressione di un pulsante
// il programma puo' pilotare stepper unipolari o bipolari
// il numero di passi fissato nella variabile moduloStep
// ad ogni passo viene rilevato anche da un LED
// 200 per stepper 17PM-M041-P1 - 12 V - 1,8 gradi per step
// 200 per microstepper CDROM - 5 V - 1,8 gradi per step
// per evitare che slitti sul supporto impostare 170 come limite massimo
// 512 per stepper 28BY J-48 - 5 V - 5,525 gradi per step
// per questo stepper il valore passato non e' step/giro
// per un giro completo 2048 step. 512 equivale ad 1/4 di giro
#include <Stepper.h>
const int stepPerGiro = 200; // adattare al passo di rotazione del vostro stepper
// inizializzazione della libreria Stepper
Stepper myStepper(stepPerGiro, 12, 11, 10, 9);
int contatorePassi = 0; // numero di step raggiunto
int moduloStep = 10; // modulo rotazione stepper da 1 a numero massimo di passi
// se moduloStep = 1 diventa un contatore di step
int moduloStepCorrente; // variabile in cui memorizzare la direzione di rotazione corrente
// alla pressione del pulsante
const int pinPulsante = 2; // pin a cui e' collegato il pulsante
const int ledPin = 13; // pin a cui e' collegato il LED
int statoPulsante = 0; // stato corrente del pulsante
void setup() {
// inizializzazione pin a cui e' collegato il pulsante
pinMode(pinPulsante, INPUT);
// inizializzazione pin a cui e' collegato il LED
pinMode(ledPin, OUTPUT);
// imposta la velocita' di rotazione a 20 rpm
myStepper.setSpeed(20);
}
void loop() {
statoPulsante = digitalRead(pinPulsante);
if (statoPulsante == HIGH) {
digitalWrite(ledPin, HIGH);
moduloStepCorrente = -moduloStep;
myStepper.step(moduloStepCorrente);
}
else {
digitalWrite(ledPin, LOW);
myStepper.step(moduloStep);
}
}