Introduzione
Negli ultimi mesi mi sono occupato, nell’ambito dell’azione PNRR Scuola 4.0, della progettazione delle “next generation classroom” e dei “next generation labs” per l’istituto in cui insegno. L’obiettivo principale di questa azione è stata quella di progettare percorsi didattici con strumenti che potessero arricchire l’apprendimento degli studenti nel campo dell’elettronica e dell’automazione, ma soprattutto prevenire il più possibile la dispersione pensando ad attività che possano appassionare i ragazzi. La mia attenzione si è naturalmente focalizzata sui prodotti Arduino che da sempre utilizzo in quanto consentono di rendere l’elettronica accessibile e stimolante per appassionati di tutte le età.
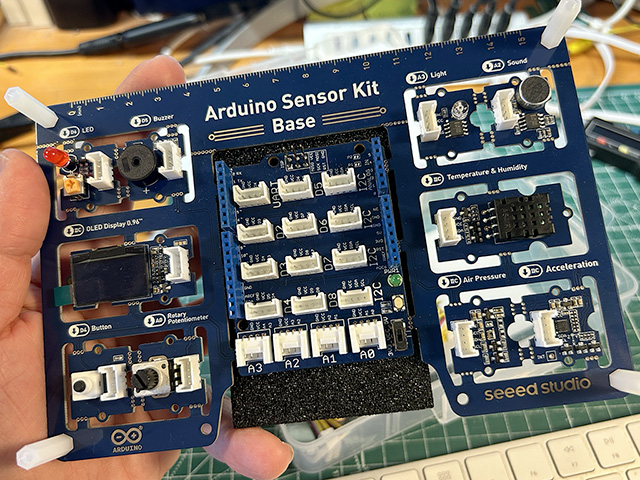
Ho analizzato diversi kit e tra quelli acquistati è presente l’Arduino Sensor Kit. Questo kit, pensato per essere intuitivo anche per i giovani studenti senza precedenti esperienze in elettronica, si presta perfettamente come elemento “attivatore” di curiosità e desiderio di esplorazione. La scelta di questo prodotto non è casuale: utilizzando il sistema Grove di Seeed Studio, esso facilita enormemente la connessione tra componenti elettronici, permettendo agli studenti di concentrarsi sulla programmazione e sull’interazione con sensori e attuatori senza preoccuparsi della complessità hardware.

La particolarità dell’Arduino Sensor Kit risiede anche nel fatto che ogni modulo è progettato con tutta la componentistica di supporto necessaria, semplificando notevolmente il processo di apprendimento e consentendo di focalizzarsi sui principi di base dell’elettronica e della programmazione. Questo approccio è adatto soprattutto ai neofiti e pone le basi per una comprensione più approfondita nei corsi avanzati che verranno svolti in anni scolastici successivi.
Le lezioni che troverete in queste pagine sono pensate per studenti di ogni età e per quanto mi riguarda saranno la base per i futuri corsi che svolgerò dal prossimo anno scolastico. Per quanto riguarda questo specifico kit, durante gli incontri, sia in presenza che online, arricchirò il materiale didattico già presente sul sito Arduino, con contenuti tecnici e teorici, facendo sviluppare progetti pratici che stimolano la creatività e la comprensione. Questo percorso non solo vi introdurrà ai fondamenti dell’elettronica e dell’automazione ma vi guiderà nella realizzazione di progetti concreti, permettendovi di vedere immediatamente i risultati delle vostre creazioni.
A chi è rivolto questo corso?
A tutti gli studenti della secondaria di primo grado e del primo anno dell’ITIS e a chiunque sia interessato a esplorare il mondo dell’elettronica e dell’automazione partendo da zero. Attraverso questo corso, avrete l’opportunità di imparare, sperimentare e, soprattutto, divertirvi, ponendo le basi per future esplorazioni elettroniche.
Durante queste brevi lezioni entrerò nel dettaglio dei termini tecnici, quindi troverete in più punti note specifiche che daranno dettagli sui termini utilizzati in modo che la guida oltre ad essere uno strumento che vi porta alla scoperta del kit sia anche un manuale di studio.
Benvenuti nel mondo di Arduino e dell’elettronica creativa. Iniziamo questo viaggio insieme 🙂
Cosa Imparerete
Durante il corso, esploreremo insieme i principi base dell’elettronica e della programmazione attraverso l’uso dell’Arduino Sensor Kit. Imparerete a:
- Leggere dati da vari sensori ambientali per comprendere il mondo intorno a voi.
- Elaborare informazioni attraverso la programmazione di base con Arduino, trasformando i dati grezzi in informazioni utili.
- Agire sul mondo esterno, utilizzando attuatori come motori e LED per creare effetti visibili e meccanici.
Analisi della kit
L’Arduino Sensor Kit include dieci moduli con connessione Grove che possono essere utilizzati individualmente o combinati per realizzare i vostri progetti. Tutti i moduli utilizzano un connettore Grove, che può poi essere collegato facilmente ad Arduino UNO R3 o R4 tramite uno Shield, il tutto può essere programmato tramite l’IDE di Arduino.
NOTE
-
- IMPORTANTE. I moduli sono montati su una PCB (scheda a circuito stampato – vedete foto allegata), che viene collegata allo Shield di base. È possibile lasciarli in questo modo e non è necessario alcun cablaggio con fili elettrici. Se si decide di provare i moduli individualmente, tenete presente che dovrete staccarli dal PCB principale ed essere cablati mediante fili elettrici e NON potranno più essere reinseriti nella PCB principale.
- Cos’è uno Shield Arduino. Uno shield Arduino è un modulo progettato per essere sovrapposto direttamente su una scheda Arduino standard, estendendone le funzionalità senza la necessità di un cablaggio esterno complicato. Gli shield sono utilizzati per aggiungere nuove capacità alle schede Arduino, come connettività wireless, controllo di motori, sensoristica avanzata, interfacciamento con display, e molto altro.
Caratteristiche chiave degli shield Arduino includono:
-
- Compatibilità di Form (form factor): Gli shield sono progettati per adattarsi perfettamente ai pin di connessione presenti sulle schede Arduino, garantendo una connessione fisica sicura e stabile.
- Facilità di Uso: Possono essere facilmente montati o rimossi, consentendo agli utenti di aggiungere o modificare funzionalità al loro progetto in modo rapido.
– Stackabili (imputabili): Molti shield sono progettati per essere impilabili, il che significa che è possibile montarne diversi contemporaneamente, a patto che non ci siano conflitti tra i pin utilizzati dai vari moduli.
- Librerie Dedicate: Spesso, per facilitare l’utilizzo degli shield, sono disponibili delle librerie software specifiche che permettono di sfruttarne le funzionalità tramite l’IDE di Arduino.
Grazie alla loro facilità d’uso e alla vasta gamma di funzionalità che offrono, gli shield sono particolarmente apprezzati sia dai principianti che dai professionisti del mondo dell’elettronica e del DIY (Do It Yourself – fai da te), permettendo di realizzare progetti complessi senza dover entrare nei dettagli tecnici di ogni singolo componente hardware.
-
- Connessione Grove. Una connessione Grove è un tipo di interfaccia standardizzata sviluppata da Seeed Studio, progettata per semplificare il processo di connessione fisica tra diversi componenti elettronici e piattaforme di prototipazione, come Arduino. L’obiettivo principale del sistema Grove è rendere più accessibile l’elettronica a hobbisti e studenti che iniziano lo studio dell’elettronica, minimizzando la necessità di saldature o di comprendere complessi schemi di collegamento.
Apriamo la scatola
Vediamo cosa è incluso nel Breakout Board del Kit Sensori Arduino:
- Lo Shield di Base
- 4 moduli digitali: LED, Pulsante, Buzzer e un Sensore di Angolo Rotativo
- 5 Sensori: Luce, Suono, Barometro, Temperatura & Umidità e Accelerometro
- 1 Display Oled
- Materiali didattici
Inoltre, tutti i pin su UNO R3 o R4 rimangono accessibili mediante l’uso di cavi jumper.
NOTE
-
- Le breakout board rappresentano uno strumento essenziale nel mondo dell’elettronica e del prototipaggio. Sono schede che incorporano uno specifico componente elettronico, il quale è già saldato sulla scheda stessa. Questo permette agli appassionati e ai professionisti di lavorare con componenti altrimenti difficili da maneggiare a causa delle piccole dimensioni o della complessità dei pin. Le breakout board rendono i collegamenti estremamente accessibili, portando le connessioni del componente all’esterno su terminali facilmente gestibili. Tipicamente, queste connessioni terminano su piazzole con un passo standard di 2,54 mm, lo standard per molte breadboard e dispositivi di prototipazione, facilitando così l’integrazione del componente in circuiti più ampi senza la necessità di saldature complesse o configurazioni intricate.
- I cavi jumper sono piccoli cavi usati in elettronica per stabilire connessioni temporanee tra i componenti su una breadboard, tra differenti breadboard, o tra componenti elettronici e dispositivi di input/output. Sono particolarmente utili nel prototipaggio e nel test di circuiti elettronici perché permettono di modificare rapidamente le connessioni senza la necessità di saldature. Esistono cavi jumper Maschio-Maschio (M-M), le estremità del cavo terminano con un connettore maschio, Femmina-Femmina (F-F) che hanno connettori femmina su entrambe le estremità (F-F), Maschio-Femmina (M-F), questi cavi hanno un connettore maschio da un lato e un connettore femmina dall’altro (M-F). I cavi jumper sono disponibili in diversi colori, il che può aiutare a mantenere l’organizzazione dei collegamenti in un progetto elettronico, facilitando l’identificazione dei diversi segnali, alimentazioni e terre. Sono strumenti indispensabili nel kit di chiunque lavori con l’elettronica a livello di hobbistica o professionale, offrendo una soluzione rapida e flessibile per esperimenti e prototipi.
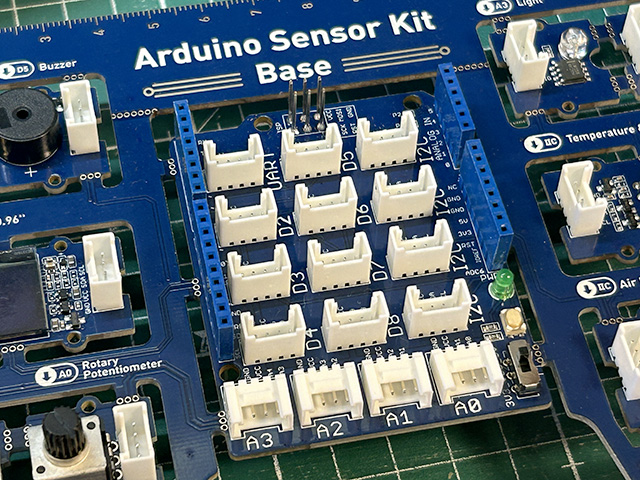
Lo Shield di base
Lo Shield di base è progettato per essere montato sopra una scheda Arduino UNO R3 o R4. È dotato di 16 connettori Grove, che, quando posizionati sopra la scheda Arduino, forniscono funzionalità a vari pin. Per interagire con i componenti utilizza i seguenti pin:
- 7x pin digitali – D2, D3, D4, D5, D6, D7
- 4x pin analogici – A0, A1, A2, A3
- 4x pin I2C
- 1x pin UART
NOTE
- IMPORTANTE. Lo Shield di base ha un interruttore per la selezione della tensione di ingresso (3V3 e 5V) che alimenta i moduli, mantenere su 5V per seguire far funzionare correttamente i dispositivi contenuti nel kit.
I 10 moduli inclusi possono essere collegati allo shield di base, attraverso i pin digitali, analogici e I2C presenti sulla scheda.
- Cosa sono i pin digitali e analogici. Nel contesto dell’elettronica e in particolare quando si parla di schede come Arduino, i termini “pin digitale”, “analogico” e “I2C” si riferiscono a diversi tipi di connessioni o porte sulla scheda che hanno funzioni specifiche. Ecco una spiegazione più dettagliata di ciascuno:
- Pin Digitali
I pin digitali sono utilizzati per leggere o scrivere due stati distinti: HIGH (alto) o LOW (basso), che corrispondono solitamente a tensioni specifiche (per esempio, 5V o 3.3V per HIGH e 0V per LOW). Questi pin sono adatti per controllare LED, leggere lo stato di pulsanti o interruttori, e per comunicazione digitale. Un pin digitale configurato come input può leggere lo stato di un dispositivo esterno (ad esempio, se un pulsante è premuto o meno), mentre un pin configurato come output può inviare un segnale (ad esempio, accendere o spegnere un LED).
- Pin Analogici
I pin analogici sono usati per leggere valori che possono variare su un ampio range, non limitandosi solo a due stati come i pin digitali. Questi pin sono tipicamente utilizzati per leggere il segnale da sensori che forniscono una variazione continua nel tempo, come un potenziometro o un sensore di temperatura. Il valore letto da un pin analogico è quindi convertito in un numero digitale tramite un convertitore analogico-digitale (ADC) interno alla scheda, permettendo al microcontrollore di elaborarlo.
- I2C (Inter-Integrated Circuit)
I2C è un protocollo di comunicazione seriale che utilizza due linee: SDA (Data) e SCL (Clock). Permette la comunicazione tra un microcontrollore (master) e uno o più dispositivi periferici (slave) utilizzando solo queste due linee, indipendentemente dal numero di dispositivi collegati. Questo lo rende particolarmente adatto per connettere vari sensori, display, e altri moduli a microcontrollori con un numero limitato di pin disponibili. I2C è apprezzato per la sua semplicità e efficienza nel collegare multiple periferiche con un cablaggio minimo.
Ogni tipo di pin ha il suo scopo specifico e la scelta tra di loro dipende dal tipo di segnale che si vuole leggere o trasmettere e dalla natura del progetto elettronico che si sta realizzando.
Continua a leggere→