Riparte da Torino dopo la pausa estiva il Campionato Universitario Makers.
Il 21 settembre, dalle 8.30 alle 16.30 si terrà la seconda tappa, al Politecnico di Torino.
La sfida é lanciata! Chi rappresenterà il piemonte alla finale nazionale?
Chi si farà notare da importanti aziende nazionali e multinazionali?
Siamo quasi alla partenza per l’edizione 2017 della Mini Maker Faire di Torino e come community Rokers non potevamo mancare a questo evento che quest’anno, per l’alto numero di partecipanti si svolgerà in due giornate: 27 e 28 maggio 2017 in Via Egeo 18 – Torino. Avremo a disposizione un tavolo sufficientemente ampio per ospitare i progetti degli utenti della community, ma soprattutto il nostro desiderio è ospitare i progetti robotici anche di altre persone che pur non facendo parte dei Rokers vogliono mostrare i loro lavori o chiedere supporto. Vogliamo andare oltre gli schemi diffusi dei concorsi e delle gare robotiche, desideriamo, divertendoci, supportare progetti che affrontano nuove sfide didattiche e soluzioni pratiche al vivere quotidiano, dalla disabilità e non solo, azioni progettuali che vedono la robotica e le esigenze dell’uomo al centro, quindi un momento di aggregazione e sperimentazione.
Se desiderate quindi, portate i vostri attrezzi e costruiamo insieme robot! 🙂
Ma cosa porteremo?
Robot di ogni tipo, robot da costruire, la nostra passione e la competenza di moltissimi, studenti, insegnanti e appassionati della robotica di servizio.
Per quanto mi riguarda, le attività di fine anno scolastico mi stanno occupando tantissimo e tra un consiglio di classe ed un’interrogazione, sto programmando cosa fare alla #MMFTO, certamente porterò con me l’esperienza di fare didattica della robotica, ma la fortuna è che nel gruppo, ormai giunto a più di 60 iscritti, sono presenti persone fuori dal comune a cui potrete chiedere ogni cosa riguardo alla cloud robotics, all’elettronica alla programmazione alla didattica. Spero di conoscervi, passate a trovarci 🙂
Descrizione del progetto:
Rokers (Robot Makers) è una community italiana che vuole diffondere la robotica di servizio nel mondo non professionale. Lo scopo di Rokers è organizzare incontri informali tra makers, ingegneri, insegnanti e appassionati.
I nostri obiettivi:
Mostrare progetti e condividere sapere
Proporre attività in grado di ispirare gli altri makers
Fare networking
Se ti stai chiedendo a che categoria appartiene il nostro progetto ecco alcune parole chiave:
Education
Maker Pro
Raspberry Pi
Arduino
Robotica di servizio
Science
Per essere aggiornati sulle nostre attività collegati al gruppo Facebook:
Sto svolgendo in queste settimane un corso Arduino per i miei allievi di II’, ma gli impegni dei consigli di classe e le attività di vicepresidenza mi hanno portato a spostare un paio di lezioni e per farmi perdonare ho deciso di implementare velocemente una breve lezioni che generi l’effetto “waooo” 🙂 spero possa funzionare. L’idea è quella di comandare la marcia e l’arresto di motori asincroni trifase (380 Vac) remotamente attraverso comandi dati da cellulare utilizzando tecnologia a basso costo.
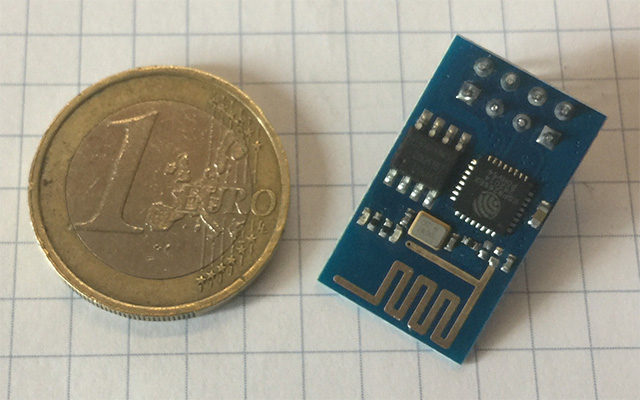
Aggiungere funzionalità di controllo remoto via WiFi ai propri progetti Arduino è ormai diventato relativamente semplice e molto economico. E’ da qualche tempo che sto utilizzando i noti ESP8266 nella versione più economica ESP01 per effettuare esperimenti di domotica a basso costo. ESP8266 è un microcontrollore programmabile in una modalità molto simile a quanto viene fatto per Arduino è costituito da un circuito SoC (System on Chip) dalle dimensioni ridottissime (5 x 5 mm) e la scheda che lo ospita integra un’antenna WiFi.
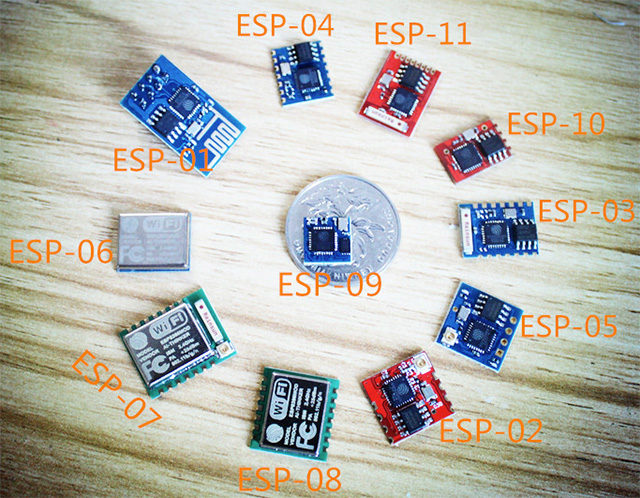
Esistono diversi modelli di ESP che includono l’ESP8266 ad essi è stato assegnato un nome che ha la seguente struttura ESP-XX dove XX è un numero che in questo momento va da 01 a 13 e che sicuramente nei prossimi mesi sarà destinato ad aumentare. In generale numeri più alti indicano funzionalità e performance più elevate, ma sicuramente ad oggi la versione più diffusa per semplicità di utilizzo e costi resta ancora l’ESP01.
I modelli ESP differiscono uno dall’altro per le seguenti caratteristiche:
dimensioni del modulo;
memoria flash, esterna al chip e varia da 512 KByte fino a 4MByte;
numero di pin;
antenna WiFi stampata su scheda o su apposito connettore a cui collegare un’antenna
Nell’immagine che segue un elenco dei più diffusi moduli ESP disponibili:
Durante le mie attività di formazione più volte mi è giunta la richiesta da persone non professioniste del settore elettronico o informatico, la realizzazione di progetti elettronici in grado di interagire via WiFi. Svolgere tale attività può richiedere competenze di livello più elevato che ovviamente tutti possono acquisire, ma per non aggiungere scoraggiamento nella fase iniziale di apprendimento ed invogliare sempre di più a sperimentare progetti sempre più complessi è forse bene partire da qualcosa di semplice che sono sicuro farà “esplodere” la vostra fantasia 🙂
Per questa breve introduzione utilizzerò: Arduino IDE, Blynk con scheda WeMos D1 Mini
Blynk
Avevo fatto una breve segnalazione tempo fa. Blynk è un’applicazione (per dirla in informatiche meglio parlare di freamework) che consente mediante dispositivi mobili (iOS e Android) utilizzando un sistema completamente grafico la realizzazione dei propri widget per comandare ad esempio l’azionamento via WiFi di dispositivi di automazione industriale o implementare progetti di domotica, ma anche di rilevare grandezze fisiche esterne e visualizzarle direttamente sul vostro dispositivo mobile.
Blynk può interagire con Arduino o Raspberry Pi se connessi ad una WiFi o a moltissimi dispositivi basati su ESP8266, modulo WiFi dotato di Input/Output General Purpose e processore ARM. Attualmente sono disponibili una grande quantità di board basate su ESP identificate tutti da un ID da ESP-01 a ESP-13 e la differenza tra una scheda e l’altra dipende dalla quantità di memoria disponibile, il numero di GPIO e il tipo di antenna WiFi.
Wemos D1 Mini
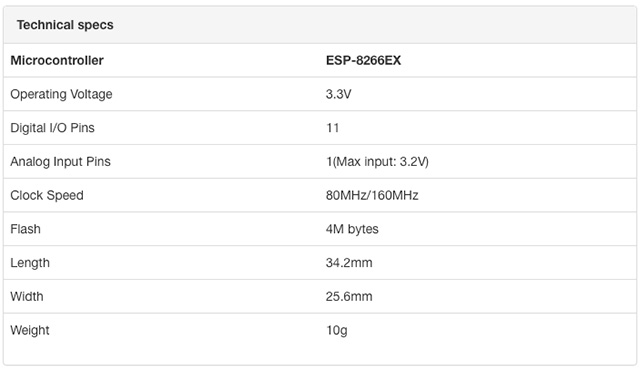
Per darvi un’idea di cosa è la Wemos D1 Mini si potrebbe fare la seguente analogia (non me ne vogliano i puristi mi serve solo per dare l’idea per chi incomincia), immaginate un Arduino micro dotato di una connessione WiFi ad un costo di non più di € 5 che potrà essere programmato in modo grafico con Blynk oppure attraverso l’IDE Arduino o ancora con NodeMCU (vedremo più avanti).
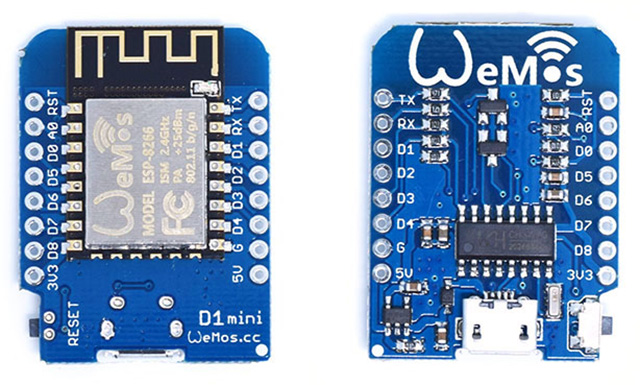
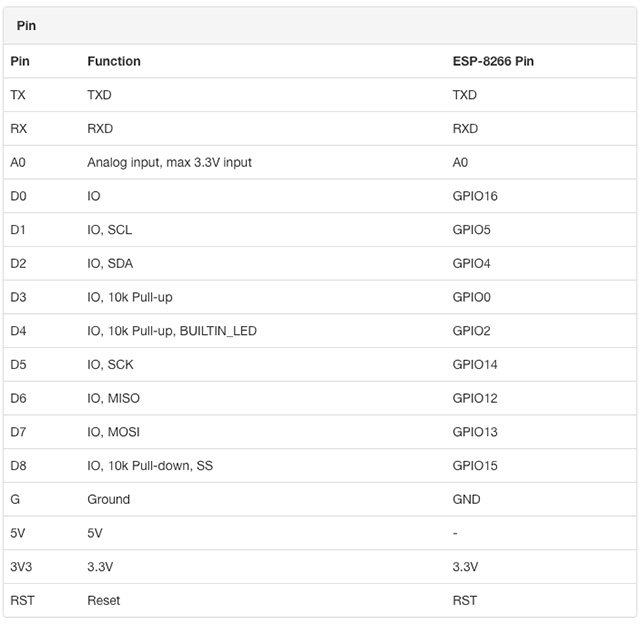
Wemos D1 Mini ospita un ESP-12F, dispone di 11 pin I/O digitali, 1 ingresso analogico, tutti i pin I/O gestiscono interrupt, pwm, I2C e ISP e tutti i pin I/O funzionano con una tensione di alimentazione di 3,3V e dispone di una memoria di 4MB.
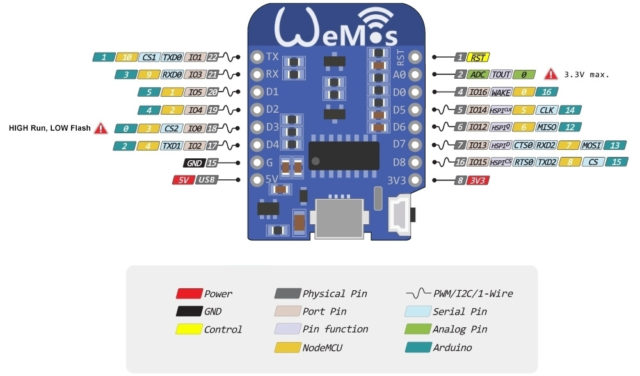
Nell’immagine sopra riportata noterete che il nome usato sulla scheda è diverso da quello utilizzato nell’IDE di Arduino, fate riferimento ai numeri scritti in verde in fase di programmazione.
Come si evince dalle immagini sopra inserite la scheda è dotata di un connettore micro USB che vi permette di caricare gli sketch, ciò non accade per altre tipologie di schede che necessitano di un debugger per il caricamento di programmi.
On-line potete trovare su diversi store una serie di shield (per un elenco completo seguire il link) che possono esser impilati su questa piccolissima scheda.
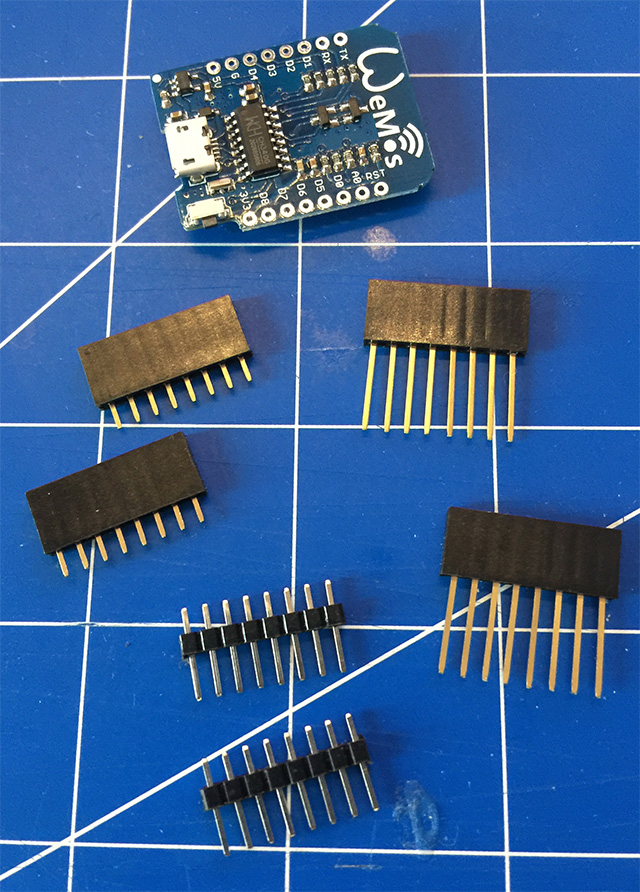
La scheda in genere viene venduta con diverse tipologie di pin header non saldati: maschio, femmina, femmina impilabile e ciò vi permette di adattarla ad ogni tipologia di circuito.
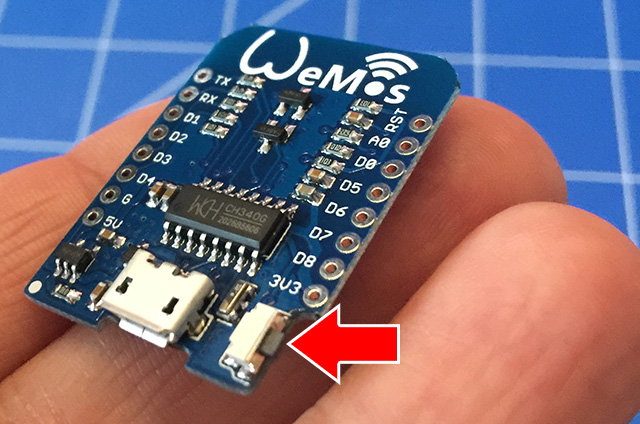
E’ presente un pulsante di reset
Sul pin analogico è possibile leggere tensioni fino a 3,2 V.
La conversione USB a UART viene realizzata dal chip CH340G (ben visibile nell’immagine sopra), presente su moltissimi cloni Arduino cinesi tra cui gli economicissimi Arduino nano. Gli utenti windows potranno procedere tranquillamente scaricando i driver dal seguente link su cui trovate anche i driver per MacOS X, però se avete l’ultima versione di MacOS X Sierra (10.12.x) utilizzate la procedura ben dettagliata a questo link. Sempre per gli utenti Mac, nel caso abbiate installato una precedente versione del driver seguite la procedura che trovate al seguente link.
Vedremo nei successivi passaggi l’utilizzo di WeMos D1 con l’Arduino IDE e con Blynk. Continua a leggere→
Come già accennato in precedenti post in questi mesi sto svolgendo una serie di attività di prototipazione rapida di sistemi di rilevazione ambientale presso la facoltà di Agraria di Padova e l’esigenza di espandere la quantità di ingressi analogici di Arduino è una necessità reale che può essere superata agevolmente con pochissimi euro (per la precisione 1€ 🙂 ) utilizzando l’integrato 4051 Multiplexer/Demultiplexer analogico ad 8 canali in grado appunto di ampliare il numero di I/O di Arduino.
Esigenze di questo tipo si presentano spessissimo, ad esempio nel caso voi vogliate collegare più sensori analogici ad un ESP che dispone di un solo ingresso analogico, o più semplicemente andare oltre i 6 pin analogici di Arduino UNO R3, situazione che si presenta ad esempio nel caso in cui si stanno occupando i pin analogici A4 e A5 per la comunicazione I2C per altri dispositivi.
L’integrato 4051 viene realizzato da diverse aziende vi allego i datasheet corrispondenti alla versione prodotta da Philips e Texas Instruments, identici nelle funzionalità:
All’interno trovate tutte le indicazioni necessarie per poterlo usare che vi riassumo nelle righe che seguono.
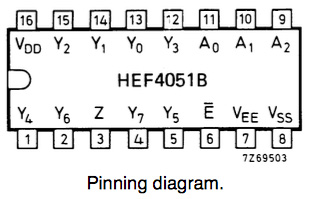
Piedinatura dell’integrato
Dove:
Z: pin input/output (connesso agli Input/Output Arduino )
E: pin di enable (attivo basso, cioè attivo su LOW da connettere a GND)
VEE: tensione di alimentazione negativa (da connettere a gnd)
VSS: terra (0 V)
A0-A1-A2: pin di selezione input (connessi a tre pin digitali di Arduino) – A0 bit meno significativo (LSB), A2 bit più significativo (MSB)
Da Y0 a Y7: pin di inputs/outputs
VDD: tensione di alimentazione positiva (da 3V a 5v)
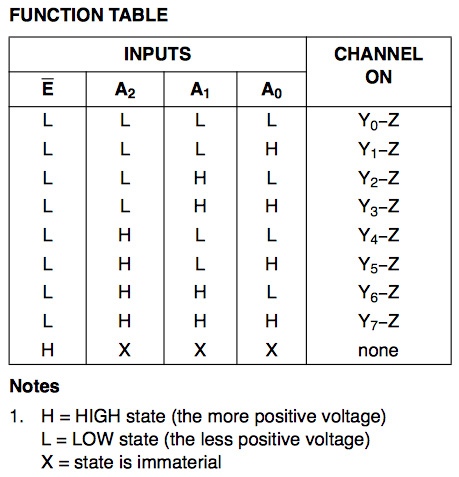
Tabella di verità
Dalla tabella si evince che per poter far funzionare l’IC è necessario connettere E (Enable) a GND.
Il 4051 è un integrato in tecnologia CMOS dotato di 8 ingressi (nominati Y) che può accettare segnali analogici compresi tra 0V e 5 V, tali segnali possono essere selezionati mediante tre pin di selezione nominati: A0, A1, A2 ed inviati direttamente ad un pin analogico di Arduino per la successiva elaborazione.
La selezione del canale Y scelto (in altre parole del segnale analogico che si desidera leggere o scrivere) può essere fatta sfruttando lo stesso Arduino mediante 3 pin digitali, sui 3 pin si comporrà il numero binario corrispondente all’ingresso analogico Y scelto.
A titolo di esempio, ricordando che con tre bit possiamo rappresentare tutti i numeri tra 0 e 7 (2^0 = 1; 2^1 = 2; 2^2 = 4):
Se A0 = 1, A1 = 1 e A2 = 0 allora l’uscita selezionata sarà la Y3
(2^1 + 2^1 + 2^0 = 2 + 1 + 0 = 3)
Se A0 = 1, A1 = 0 e A2 = 1 allora l’uscita selezionata sarà la Y5
(2^1 + 2^0 + 2^2 = 2 + 0 + 4 = 5)
Per chiarirne il funzionamento analizziamo le due modalità operative:
Input: lettura di segnali analogici presenti sugli ingressi Y del 4051
Output: invio di un segnale analogico su una delle 8 uscite Y del 4051
4051 usato come multiplexer con Arduino
Lettura di segnali analogici presenti sugli ingressi Y del 4051Continua a leggere→



 La scheda in genere viene venduta con diverse tipologie di pin header non saldati: maschio, femmina, femmina impilabile e ciò vi permette di adattarla ad ogni tipologia di circuito.
La scheda in genere viene venduta con diverse tipologie di pin header non saldati: maschio, femmina, femmina impilabile e ciò vi permette di adattarla ad ogni tipologia di circuito.