Diversi mesi fa mi venne chiesto di sviluppare un corso di base per la realizzazione di sistemi IoT per colleghi che lavorano nei licei. Come spesso accade molte delle sperimentazioni che propongo durante i miei corsi sono derivate da attività laboratoriali svolte con i miei studenti. In più occasioni mi è stato chiesto di pubblicare tutorial in merito all’IoT e recentemente i colleghi che seguiranno il mio prossimo corso: Realizzare laboratori green con il Making e il Coding – 3 ed. mi hanno chiesto esplicitamente di mostrare come costruire attività laboratoriali semplici in cui ci fossero componenti IoT che permettono di controllare remotamente su smartphone la nostra serra o il nostro sistema di controllo ambientale, pertanto a corredo del corso online che inizierà tra breve aggiungerò una serie di guide “IoT” su questo sito aperte a tutti.
La guide saranno utilizzate per estendere le funzionalità delle automazioni che verranno realizzate durante le lezioni, saranno pubblicate nell’arco della durata del corso e secondo le necessità didattiche dei singoli utenti iscritti, potranno essere personalizzate e rese fruibili ai propri studenti.
Sicuramente tra le piattaforme più semplici per connettere dispositivi IoT che possiamo trovare online Blynk IoT è la più usata e conosciuta.
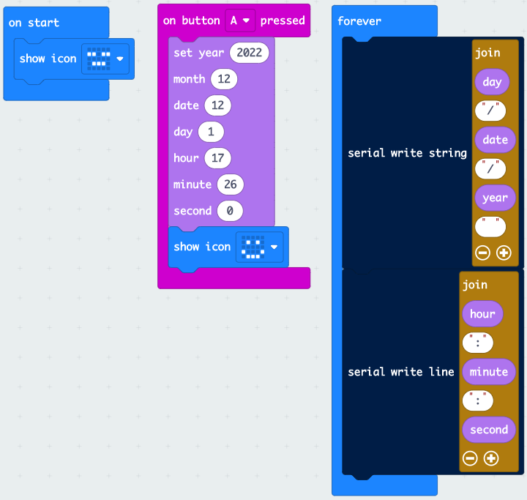
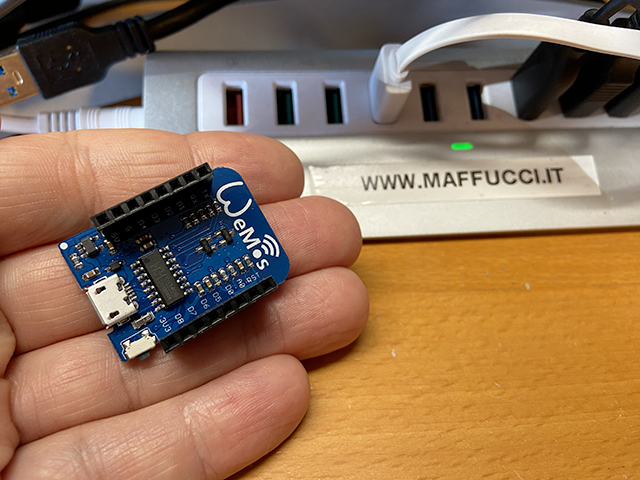
Con Blynk IoT possiamo controllare remotamente il nostro hardware, visualizzare i dati rilevati dai sensori, creare dei datalogger e molto altro. Abbiamo visto sempre su questo sito in passato l’uso di ThingSpeak con BBC micro:bit ed un ESP01 e in questa serie di brevi tutorial, vedremo come utilizzare un WeMos D1 R2 mini per realizzare gli esercizi di base che poi ci consentiranno di controllare remotamente i nostri dispositivi come ad esempio un sistema per la misura dell’inquinamento derivante dalle polveri sottili. Non mi dilunghero sulla modalità di utilizzo del WeMos D1 R2 mini su queste pagine trovate indicazioni.
Per chi avesse altri dispositivi compatibili con la piattaforma Blynk IoT diversi da quello che utilizzo negli esercizi proposti, la procedura di installazione e programmazione è simile, nel caso di differenze fornirò indicazioni.
Agli iscritti al corso darò informazioni specifiche sull’uso di Blynk IoT con BBC micro:bit e Arduino Nano 33 IoT ed altre piattaforme.
La semplicità e la praticità di BlynkIoT risiede nel fatto che è possibile costruire rapidamente un’interfaccia grafica sul proprio dispositivo iOS e Android al fine di controllare e monitorare i propri progetti. Qundi potrete creare una vostra dashboard virtuale (un centro di controllo grafico) costituto da pulsanti, slider, grafici e molto altro da disporre sullo schermo del vostro dispositivo. All’interno dell’applicazione esistono Widget specifici per il controllo della vostra automazione.
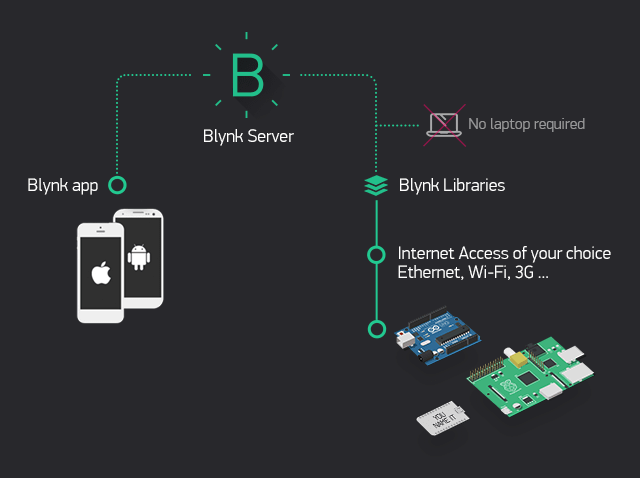
Tre sono le componenti fondamentali del sistema Blynk IoT:
- Applicazione Blynk: applicazione sul vostro smartphone che mediante i widget forniti permette di creare l’interfaccia grafica per controllare la vostra automazione.
- Server Blynk: il servizio che gestisce la comunicazione tra l’hardware e il vostro smartphone.
- Librerie Blynk: permettono di gestire i comandi in ingresso tra la vostra piattaforma hardware: micro:bit, WeMos D1 mini, Arduino, ecc… e il server Blynk.
Durante le esercitazioni analizzeremo le caratteristiche di Blynk ma una cosa importante da sapere subito è che la connessione al cloud può avvenire in diverse modalità: Ethernet, Wi-Fi, USB, GSM, Bluetooth, BLE. Continua a leggere