Allenamento per l’esame di maturità
Percorso di laboratorio con Arduino per studenti di quinta ITIS
Obiettivo didattico
Modellare un ciclo automatico come macchina a stati: attesa, marcia, pausa, allarme e reset. L’attività avvicina gli studenti al modo in cui si progetta un processo tecnico da esame.
Materiali suggeriti
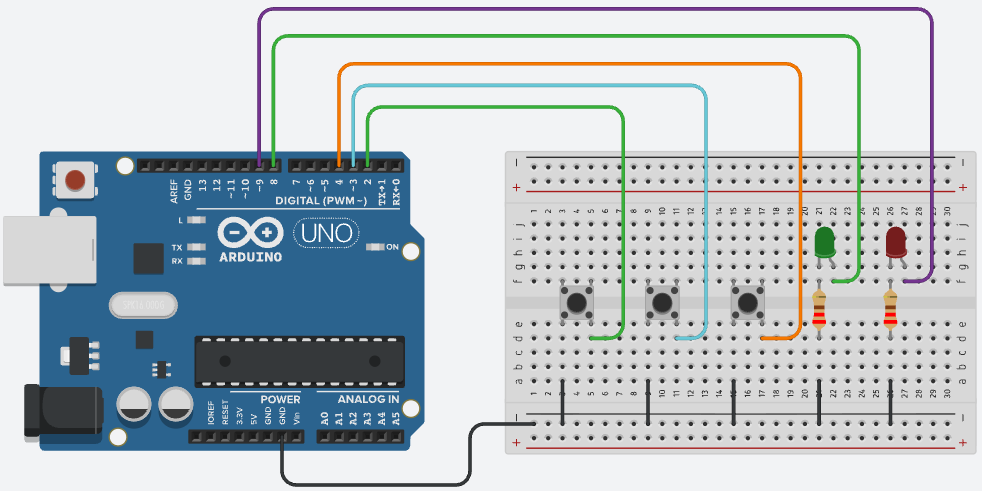
- Arduino UNO R3 o UNO R4,
- 3 pulsanti (START, PAUSA, RESET);
- 2 LED;
- 2 Resistori da 220 Ohm (per i LED);
- jumper.
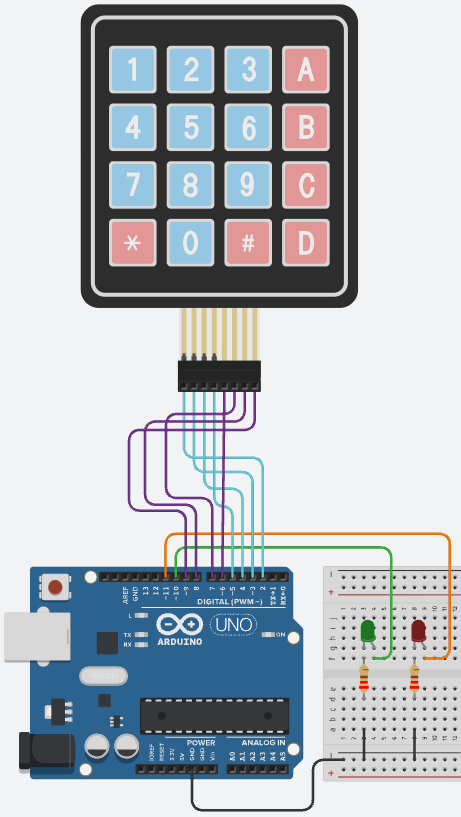
Schema di collegamento
Richiamo teorico
Una macchina a stati finiti rappresenta un processo come un insieme di stati mutuamente esclusivi. In ogni stato il sistema esegue azioni ben definite e attende eventi che causano il passaggio allo stato successivo. Questo metodo riduce gli errori logici nei programmi complessi.
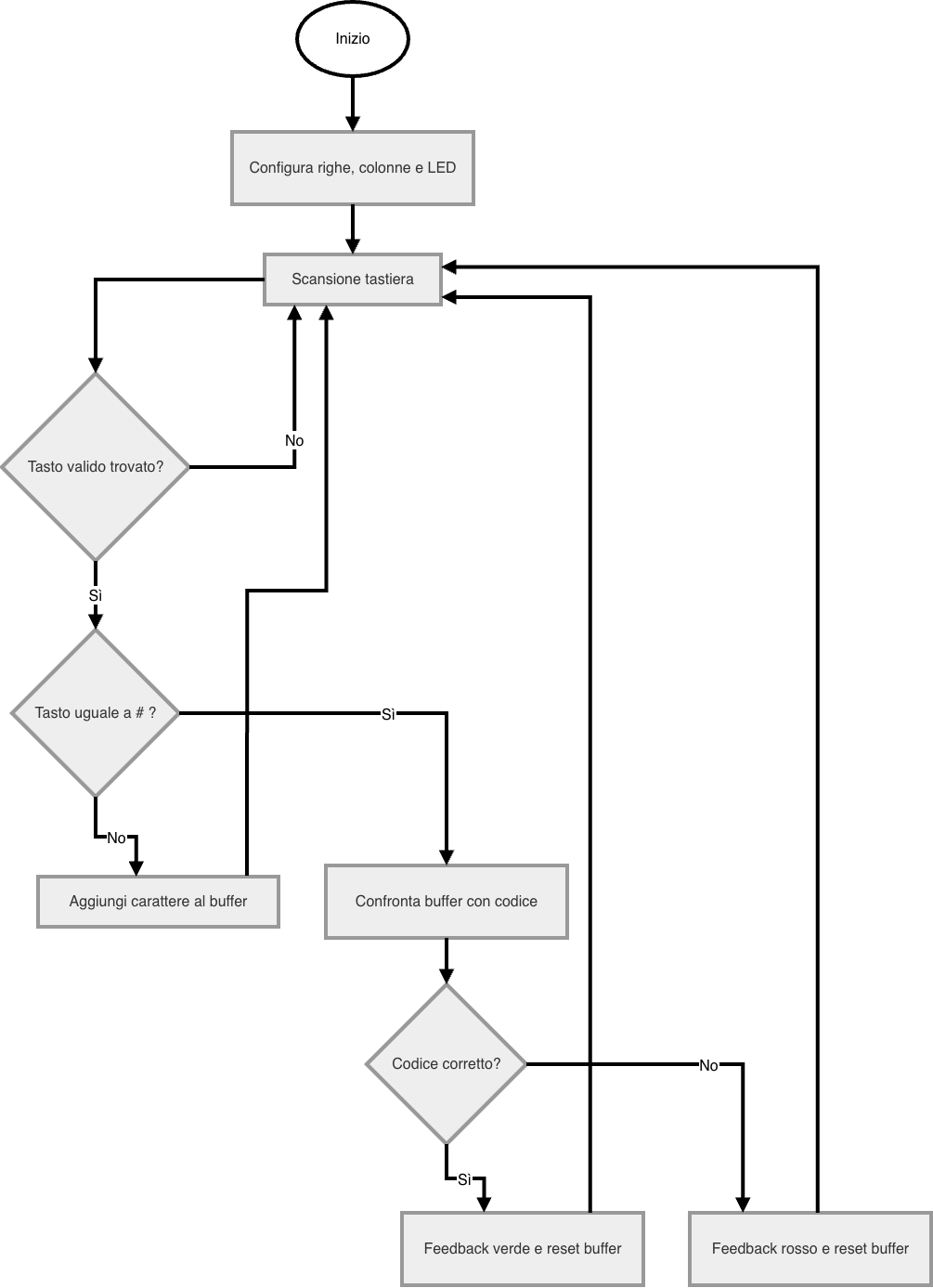
Schema logico dell’attività
- All’avvio il sistema è in ATTESA;
- se arriva START passa a MARCIA;
- in MARCIA può ricevere PAUSA oppure entrare in ALLARME se scade il tempo massimo;
- in PAUSA attende una nuova pressione di START;
- da ALLARME si esce solo con RESET, che riporta il sistema in ATTESA.
Diagramma a stati
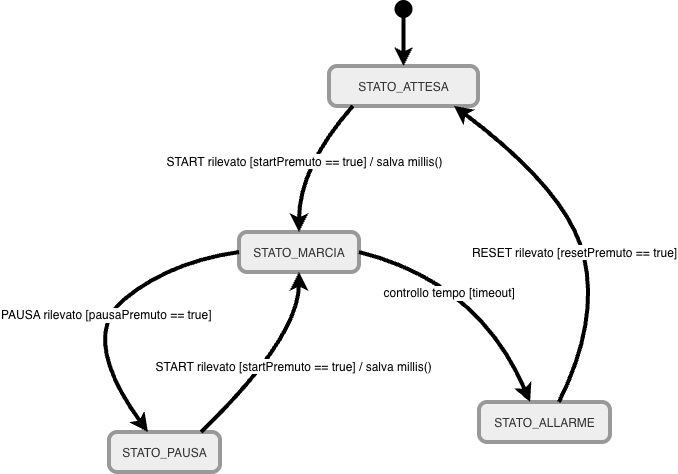
Per rappresentare in modo corretto il comportamento di questo esercizio è molto utile affiancare al codice un diagramma a stati. In questo caso, infatti, il sistema non si limita a eseguire istruzioni una dopo l’altra, ma cambia comportamento in funzione della condizione operativa in cui si trova.
Il programma può trovarsi in un solo stato per volta, e ogni stato descrive una precisa fase di funzionamento del sistema. Nel nostro sketch gli stati sono quattro:
STATO_ATTESASTATO_MARCIASTATO_PAUSASTATO_ALLARME
Il diagramma a stati è particolarmente adatto a questa situazione perché mostra in modo immediato tre aspetti fondamentali:
- quali sono gli stati possibili del sistema;
- quali eventi provocano il passaggio da uno stato all’altro;
- quale logica di funzionamento è stata implementata nel codice.
In altre parole, mentre il diagramma di flusso descrive bene la sequenza dei controlli svolti nel loop(), il diagramma a stati descrive meglio la struttura logica del processo.
Stato iniziale del sistema
Nel diagramma compare il simbolo iniziale che punta verso STATO_ATTESA. Questo significa che, all’accensione di Arduino o dopo un reset, il sistema parte nello stato di attesa.
In questa fase il ciclo automatico non è attivo. Il LED di marcia è spento, il LED di allarme è spento e il programma controlla continuamente i pulsanti in attesa di un comando di avvio.
Dal punto di vista didattico, questo è il comportamento tipico di molti sistemi automatici: il processo non parte in modo autonomo, ma richiede un comando esplicito dell’operatore.
Transizione da ATTESA a MARCIA
Dal nodo STATO_ATTESA parte una freccia verso STATO_MARCIA con l’etichetta:
START premuto / istanteInizioMarcia = millis()
Questa notazione va letta così: se il sistema si trova in attesa e viene rilevata la pressione del pulsante START, allora il programma passa allo stato di marcia. Durante questa transizione viene anche eseguita un’azione importante, cioè il salvataggio dell’istante iniziale della marcia tramite millis().
Questo passaggio è fondamentale perché permette al sistema di iniziare a contare il tempo trascorso in marcia senza bloccare il programma. In pratica, nel momento in cui parte la marcia, viene memorizzato il riferimento temporale da cui inizierà il controllo del timeout.
Significato dello stato MARCIA
Lo stato STATO_MARCIA rappresenta la fase in cui il sistema è attivo.
In questa condizione il LED di marcia viene acceso, il LED di allarme resta spento e il programma continua a controllare due possibili situazioni:
-
- la richiesta di pausa;
- il superamento del tempo massimo consentito.
Importante: nello stato di marcia il sistema non esegue una sola azione, ma resta in una condizione operativa in cui il programma continua a verificare gli eventi che possono modificare il comportamento complessivo del processo.
Transizione da MARCIA a PAUSA
Se durante la marcia viene premuto il pulsante PAUSA, il sistema passa a STATO_PAUSA.
Questa transizione rappresenta una sospensione del ciclo. Dal punto di vista logico, il processo non è terminato, ma è momentaneamente fermo in attesa di un nuovo comando.
Nel diagramma questa freccia mostra che la pausa può essere richiesta solo quando il sistema si trova effettivamente in marcia. Questo rende molto chiaro un concetto fondamentale: non tutti i comandi hanno senso in tutti gli stati. Il significato di un ingresso dipende dallo stato corrente del sistema.
Transizione da MARCIA a ALLARME
La seconda uscita possibile da STATO_MARCIA conduce a STATO_ALLARME ed è attivata dal superamento del tempo massimo di marcia.
Nel codice questa condizione è realizzata confrontando il tempo attuale, ottenuto con millis(), con l’istante iniziale salvato all’ingresso nello stato di marcia. Quando la differenza raggiunge o supera il valore impostato in TEMPO_MASSIMO_MARCIA, il sistema genera l’allarme.
Questo passaggio è interessante perché mostra come una macchina a stati possa cambiare stato non solo in risposta a un pulsante, ma anche in risposta a una condizione temporale. In molti sistemi automatici reali, infatti, il tempo costituisce un vincolo di sicurezza o di controllo del processo.
Significato dello stato PAUSA
Lo stato STATO_PAUSA rappresenta una sospensione controllata del ciclo.
In questa fase il LED di marcia è spento e il LED di allarme è spento. Il programma non torna allo stato iniziale, ma resta in una condizione intermedia da cui il processo può riprendere.
Dal diagramma si vede che da questo stato esiste una sola transizione utile: la pressione di START, che riporta il sistema in STATO_MARCIA.
È importante però osservare un dettaglio del codice: quando si torna in marcia dalla pausa, il programma esegue di nuovo l’istruzione che salva istanteInizioMarcia = millis(). Questo significa che il conteggio del tempo massimo non viene congelato e poi ripreso, ma riparte da zero.
Questo aspetto è importante, perché aiuta a capire che il diagramma descrive la struttura generale del comportamento, mentre le variabili e le azioni associate alle transizioni determinano il comportamento concreto del sistema.
Significato dello stato ALLARME
Lo stato STATO_ALLARME rappresenta una condizione anomala o di sicurezza.
Quando il sistema entra in allarme, il LED di marcia viene spento e il LED di allarme viene acceso. In questo modo l’operatore può riconoscere immediatamente che il ciclo si è interrotto per il superamento del limite previsto.
Dal diagramma si vede che da STATO_ALLARME non si può tornare direttamente in marcia. L’unica uscita prevista è verso STATO_ATTESA, e questa transizione è attivata dal pulsante RESET.
Anche questa è una scelta molto importante dal punto di vista progettuale: in presenza di un allarme il sistema non riparte automaticamente, ma richiede un intervento esplicito da parte dell’operatore. È una logica tipica dei sistemi in cui la sicurezza o il controllo delle anomalie hanno priorità sulla continuità del funzionamento.
IMPORTANTE
Quando si studiano le macchine a stati è utile distinguere tra:
-
-
- azioni di stato, cioè ciò che il sistema fa mentre si trova in un determinato stato;
- azioni di transizione, cioè ciò che il sistema esegue nel momento in cui passa da uno stato a un altro.
-
Nell’esercizio proposto, l’accensione o lo spegnimento dei LED, è un’azione associata allo stato, perché avviene nel blocco di codice relativo a ciascun case.
Il salvataggio di istanteInizioMarcia, invece, è un’azione di transizione, perché viene eseguito nel momento in cui il sistema entra nello stato di marcia.
Questa distinzione è molto utile per comprendere meglio sia il diagramma sia il codice.