Prossima settimana per le classi terze impegno di Alternanza Scuola Lavoro presso l’ITIS G.B. Pininfarina, attività di azienda simulata, purtroppo sono stati ridotti i tempi grazie alla legge di bilancio e quindi cosa fare per le due classi 3 Automazione che seguo?
Ho strutturato un’attività derivata da una parte di un modulo didattico di automazione e microcontrollori che sviluppai negli scorsi anni e che ho riadattato nei contenuti e nella forma per poter essere sviluppata in una settimana, come ho disegnato il tutto?
Obiettivo:
ci si pone nelle condizioni di un’azienda che vuole produrre kit robotici per la didattica, l’obiettivo è assemblare i kit che fornirà il Prof., produrre esempi di codice, sviluppare miglioramenti nella struttura e nel codice, pensare al materiale pubblicitario, sviluppare la documentazione tecnica e pubblicitaria in italiano e in inglese.
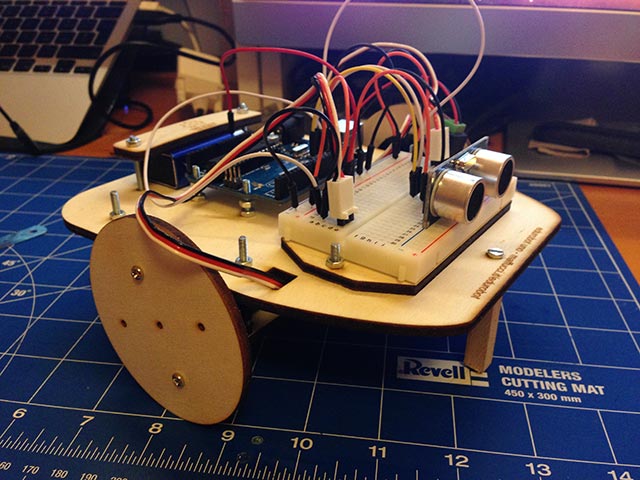
Per accelerare i tempi ho ripreso il progetto EduRobot sviluppato qualche anno fa, un kit in legno molto semplice nella struttura e nell’elettronica, il progetto si era perso tra gli scatoloni della mia soffitta 🙂
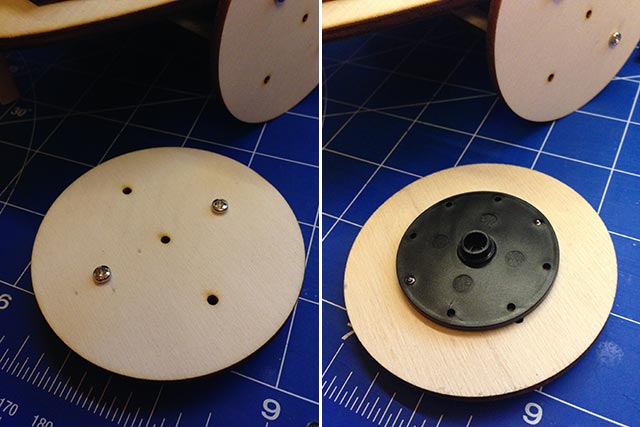
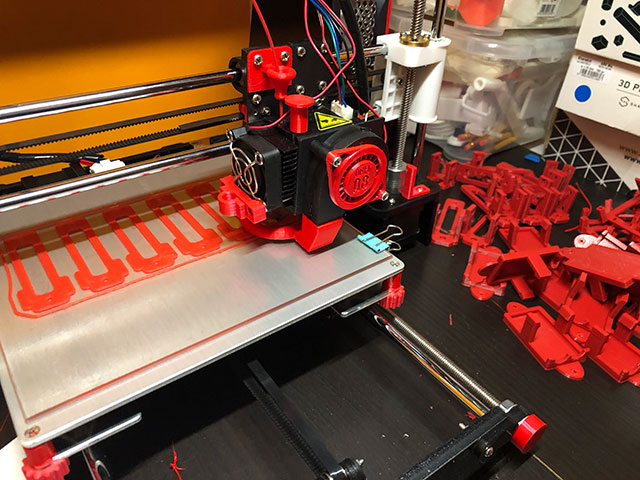
Ho riesumato il tutto e realizzato alcuni elementi 3D adattandoli ai fori già presenti sulla basetta di compensato, in questo modo il kit diventa più semplice nell’assemblaggio.
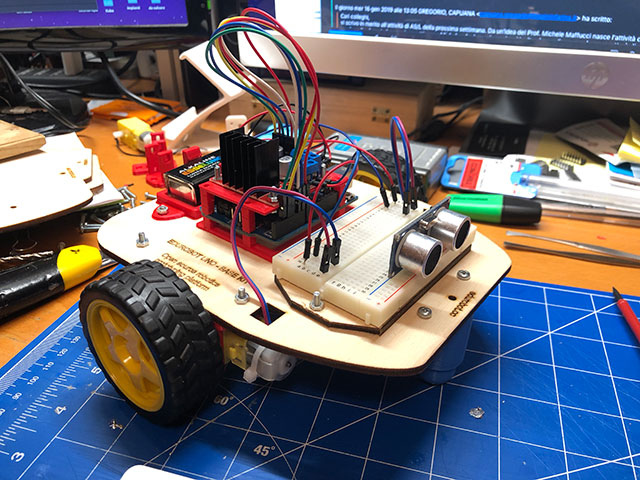
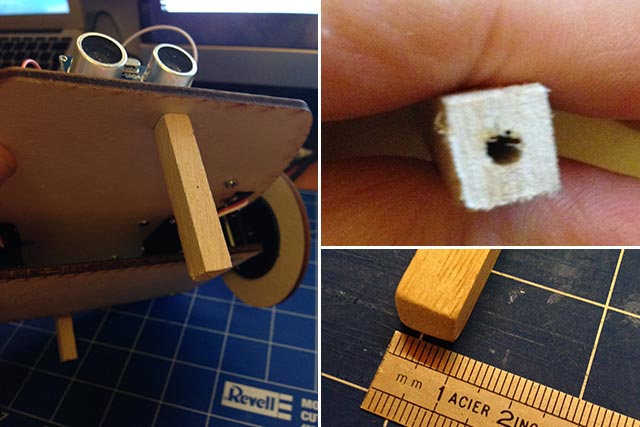
Curiosamente ho notato che con 4 piccoli elementi stampati in 3D è possibile realizzare un robot semplice di qualsiasi forma si desidera, potreste fissare questi elementi su una basetta rigida: compensato, plexiglass, cartone, ecc… Mi sto convincendo che diventerà uno degli ausili che utilizzerò nei prossimi mesi a scuola, perché?
“Poca spesa tanta resa” 🙂
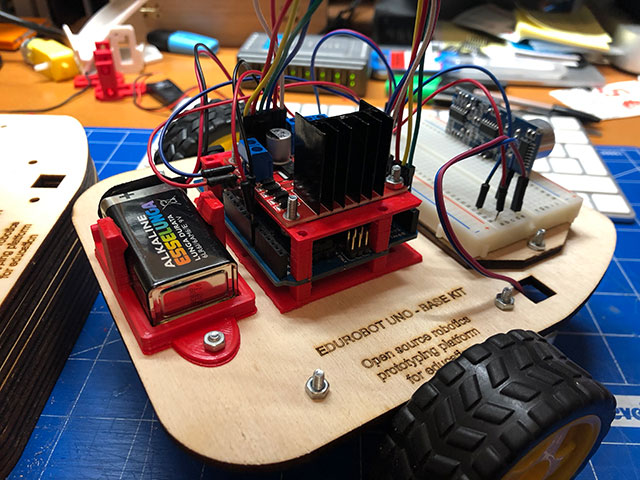
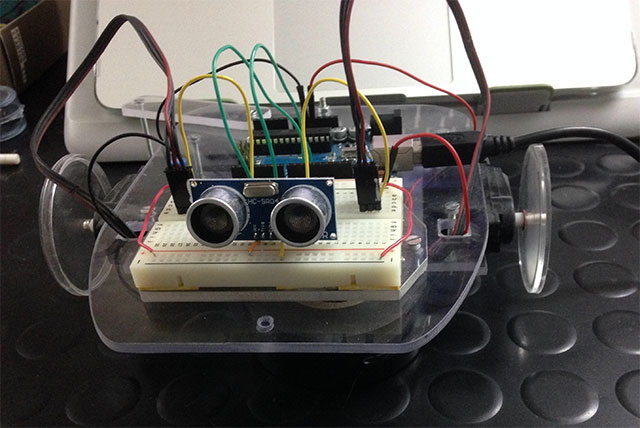
Per ridurre gli spazi ho impilato un L298N Dual H-Bridge su un Arduino.
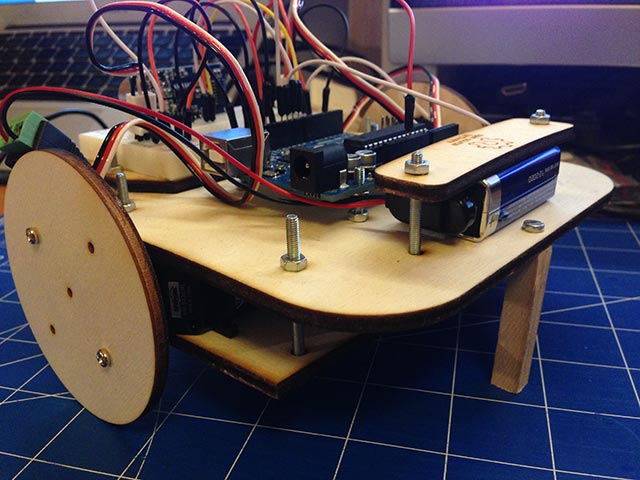
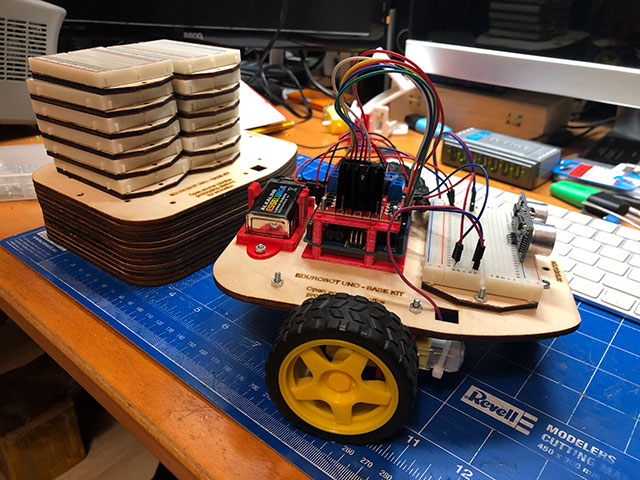
Per ora ho utilizzato come fonte di alimentazione una batteria da 9V, certamente so che non è la soluzione migliore, ma pensando a due classi 3, risulta la soluzione che nei tempi e nelle disponibilità economiche risulta più vantaggiosa, modificare il tutto con una pratica batteria LiPo è molto semplice… ci penserò nei prossimi mesi.
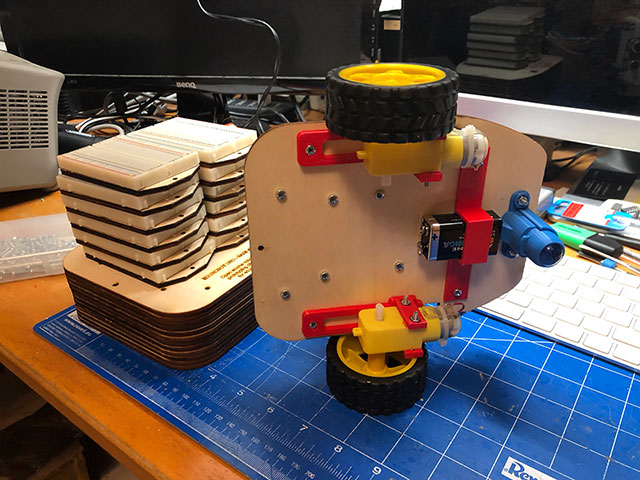
Per bilanciare meglio il robot ho aggiunto come peso un batteria aggiuntiva di riserva posta in prossimità della caster ball. Sto già disegnando adattamenti per Raspberry Pi e BBC micro:bit che cercherò di rendere disponibile nel breve.
Certamente entro lunedì proporrò un breve manuale di costruzione e programmazione (riprendo molte cose che ho già realizzato e scritto su queste pagine) per quanto riguarda i sorgenti per la stampa 3D anche questi saranno disponibili da lunedì su Thingiverse, in modo che anche altri, spero, possano utilizzare il materiale per sviluppare attività didattiche.
Tanto merito per la riuscita di questo piccolo progetto alla mia nuova Anet A8 sta stampando giorno e notte da 3 giorni 🙂
A presto.
 Prima o poi mi deciderò nel renderlo definitivo.
Prima o poi mi deciderò nel renderlo definitivo.