Un percorso per chiarire i concetti fondamentali e lavorare in laboratorio con maggiore consapevolezza.
Chi frequenta da tempo questo sito sa che qui trovano spazio soprattutto articoli approfonditi: lezioni estese, tutorial dettagliati, schemi, immagini, codice, proposte operative per il laboratorio e percorsi pensati per la didattica.
L’obiettivo, in queste pagine, è sempre stato quello di affrontare gli argomenti con attenzione, provando a costruire materiali chiari, solidi e riutilizzabili per studenti, docenti, appassionati e maker.
Proprio per questo, può forse sorprendere la nascita di una nuova serie di post più brevi. Eppure questa scelta non nasce da un cambio di rotta, né da una riduzione delle ambizioni didattiche. Nasce, al contrario, da un’esigenza molto concreta che negli ultimi anni è diventata sempre più evidente: per affrontare bene i temi più complessi, bisogna avere chiari i concetti fondamentali.
Da anni lavoro soprattutto con studenti del triennio dell’ITIS, in particolare delle classi quarte e quinte. Più recentemente, però, mi è capitato sempre più spesso di accompagnare anche studenti del biennio, molti dei quali mostrano un entusiasmo autentico verso l’uso di Arduino e desiderano progettare dispositivi, automazioni e piccoli sistemi anche piuttosto articolati.
Questo entusiasmo è prezioso. Curiosità, desiderio di costruire, voglia di sperimentare: sono spesso il miglior punto di partenza possibile per avvicinarsi all’elettronica e all’automazione.
Accanto a questo slancio iniziale, però, nel lavoro quotidiano in laboratorio emerge con chiarezza anche un altro aspetto: le nozioni di base dell’elettrotecnica e dell’elettronica non sempre sono sufficientemente stabili e consapevoli.
Capita così che termini come tensione, corrente, resistenza, massa, polarità, collegamento in serie e in parallelo, uso corretto del multimetro o funzione di una resistenza di pull-up vengano utilizzati in modo intuitivo, ma non pienamente compresi.
Molti dei temi che compariranno in questa serie nascono proprio dalle domande ricorrenti che gli studenti più giovani mi pongono durante le lezioni e le attività di laboratorio. Ho voluto raccogliere quei dubbi, quelle richieste di chiarimento e quelle incertezze che emergono con maggiore frequenza per trasformarle in un percorso ordinato, accessibile e utile anche al di fuori della classe.
Ed è precisamente da questa osservazione che nasce l’idea della nuova rubrica.
Molto spesso, infatti, la difficoltà non sta soltanto negli argomenti avanzati, ma nel fatto che i fondamenti vengono incontrati presto, usati presto, ma non sempre assimilati con la necessaria profondità. Così può accadere che uno studente riesca a montare un circuito, caricare uno sketch e vedere un sistema funzionare, ma fatichi poi a spiegare che cosa stia realmente accadendo dal punto di vista elettrico. E senza questa comprensione, anche le attività più motivanti rischiano di restare fragili.
Per questo ho deciso di affiancare ai tutorial più articolati una serie di lezioni brevi, chiare e mirate, pensate per tornare sui concetti essenziali con un linguaggio accessibile, ma senza rinunciare al rigore.
Saranno testi più snelli nella forma, ma costruiti con la stessa attenzione che riservo ai contenuti più estesi: attenzione ai dubbi reali degli studenti, agli errori ricorrenti, alle semplificazioni fuorvianti e ai passaggi che, se trascurati, rendono più difficile tutto ciò che viene dopo.
A questa scelta si lega anche una riflessione sul formato.
So bene che oggi il video è uno strumento potente, immediato e molto efficace sotto molti aspetti. Non ho nulla contro questa forma di comunicazione, che anzi può essere molto utile in diversi contesti. Tuttavia, realizzare video con continuità richiede tempi di progettazione, registrazione, montaggio e revisione che, almeno in questa fase, non riesco a sostenere in modo regolare. Ma il punto, per me, non è soltanto organizzativo.
Da sempre prediligo la lezione scritta.
La scrittura mi obbliga a rallentare, a ordinare meglio le idee, a scegliere con maggiore precisione le parole e a riflettere più a fondo sul modo in cui un concetto può essere spiegato. Ogni testo diventa così non solo un contenuto da pubblicare, ma anche una traccia di lavoro, una struttura didattica, un riferimento che posso riprendere, sviluppare e collegare ad altri argomenti nel tempo. In questo senso, le lezioni scritte funzionano per me anche come uno storyboard permanente: aiutano chi legge, ma aiutano anche me a costruire percorsi più coerenti.
C’è poi un secondo aspetto che considero importante.
Nel caso di argomenti tecnici di base, credo che leggere un testo mentre si osserva uno schema, si prende un appunto, si prova un collegamento, si misura un valore o si monta un piccolo circuito possa essere estremamente formativo. Il testo scritto ha un ritmo diverso: permette di fermarsi, tornare indietro, rileggere, verificare, annotare, confrontare subito teoria e pratica. Non impone velocità, lascia spazio al tempo dell’apprendimento.
Non penso affatto che il testo debba sostituire il video in assoluto. Penso però che, almeno per alcuni apprendimenti fondamentali, la combinazione tra lettura, riflessione e azione pratica sia particolarmente efficace. In un contesto in cui siamo sempre più abituati a fruire contenuti rapidamente, riprendere un passo più lento può sembrare controcorrente, eppure, proprio questa lentezza consente spesso di fissare meglio i concetti e di trasformarli in competenza reale.
Questa nuova serie, dunque, non nasce per sostituire gli articoli lunghi, né per semplificare artificialmente i contenuti. Nasce per affiancarli e per offrire un percorso di accesso più graduale a studenti, principianti e lettori curiosi che desiderano chiarire bene i fondamenti prima di affrontare temi più complessi.
Ogni post sarà costruito attorno a una domanda semplice o a un nodo concettuale essenziale. L’obiettivo sarà spiegare in modo comprensibile, ma corretto, un singolo aspetto dell’elettrotecnica o dell’elettronica, cercando di collegarlo, quando possibile, a situazioni reali di laboratorio, a esempi concreti o a errori frequenti da evitare.
Questa serie è pensata soprattutto per:
- studenti che stanno iniziando;
- docenti che cercano spiegazioni sintetiche ma affidabili da riprendere in classe;
- appassionati e maker che desiderano chiarire alcuni concetti di base;
- lettori che preferiscono contenuti brevi, ma non superficiali.
Continuo a credere che, soprattutto nelle discipline tecniche, spiegare bene le basi sia un lavoro importante quanto affrontare gli argomenti più avanzati. Anzi, spesso è proprio dalla qualità delle fondamenta che dipende la possibilità di comprendere davvero tutto il resto.
Per questo motivo, accanto ai tutorial più ampi e strutturati, da oggi troveranno spazio anche queste brevi lezioni essenziali, pensate per rendere più accessibili i concetti fondamentali dell’elettrotecnica e dell’elettronica e per accompagnare, un passo alla volta, chi sta iniziando questo percorso.
Da dove partirà la serie
Questa collezione di lezioni è attualmente in costruzione e si svilupperà progressivamente a partire da alcuni concetti fondamentali che, nell’attività di laboratorio, si rivelano spesso decisivi per comprendere davvero ciò che si sta facendo.
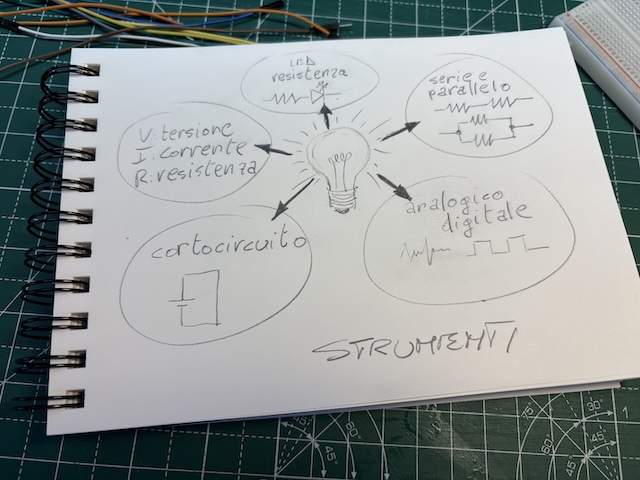
Tra i primi temi che intendo affrontare ci sono:
- differenza tra tensione, corrente e resistenza;
- perché un LED ha bisogno di una resistenza in serie;
- che cosa significa GND in un circuito;
- collegamento in serie e in parallelo;
- che cos’è un cortocircuito e perché è pericoloso;
- a cosa serve il multimetro e come iniziare a usarlo;
- pull-up e pull-down;
- differenza tra segnale analogico e digitale.
Il percorso crescerà nel tempo, anche a partire dalle difficoltà più frequenti che emergono durante le attività pratiche e dalle domande ricorrenti degli studenti.
Spero che questa nuova formula possa essere utile.
Come sempre, osservazioni, suggerimenti e proposte di temi da affrontare saranno molto ben accetti.
Buona lettura e buon lavoro 🙂