Nelle mie attività “5 minuti da Maker” del weekend ho rimesso in sesto un attrezzo che amo: le bacchette da Nordic Walking. Durante una camminata, una scivolata su un sentiero fangoso ha piegato una bacchetta commerciale. Da lì l’idea: autocostruirne un paio usando materiale di recupero e un pizzico di stampa 3D.
Obiettivo: resistenti, leggere, economiche.

Ho riutilizzato alcune canne di bamboo che avevo in balcone come tutori per le piante, le ho tagliate a misura delle bacchette originali e ho modellato punta e tappo superiore in 3D. In punta ho inserito due inserti a stella (recupero da un vecchio avvitatore), mentre per il manico ho usato uno scampolo di tessuto plastico; i guantoni sono quelli recuperati dal vecchio set. Sul manico ho praticato un forellino per una fascetta che fissa i guantoni.
Test sul campo questa mattina: funzionano egregiamente.


Materiali (recupero + poco altro)
- 2 canne di bamboo dritte, senza crepe (diametro esterno ~20–24 mm)
- 2 inserti a stella in acciaio (tipo punte/bit per avvitatore)
- Tessuto plastico o nastro telato/camera d’aria per il grip
- Guantoni/laccetti recuperati dalle vecchie bacchette
- 2 fascette in nylon
- Colla epossidica bicomponente o cianoacrilica gel
- (Opz.) Tubetto termorestringente largo per rifinire l’impugnatura


Strumenti
- Seghetto a mano
- Carta vetrata fine
- Trapano/punteruolo per foro passafascetta
- Stampante 3D (consiglio PETG o Nylon per uso outdoor)

Dettagli costruttivi







Dimensionamento veloce
- Lunghezza bacchetta: regola pratica del Nordic Walking
altezza (cm) × 0,68 > arrotondate al multiplo di 5 più vicino.
Esempio: 175 cm × 0,68 ≈ 119 cm > scegliere 120 cm. - bamboo: scegli canne con spessore omogeneo; conserva il nodo vicino alla punta per rinforzo, se possibile.
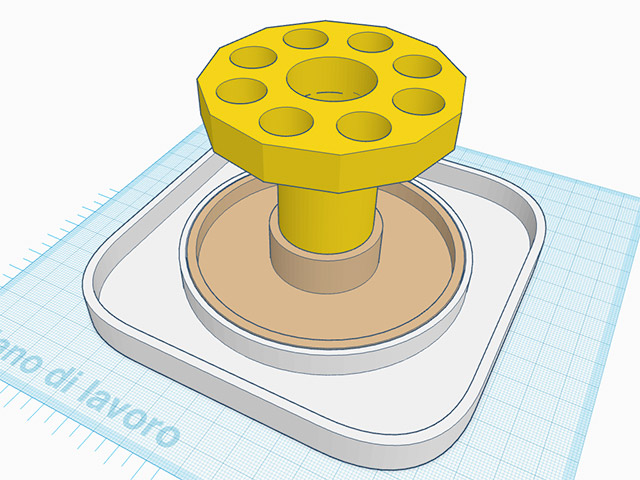
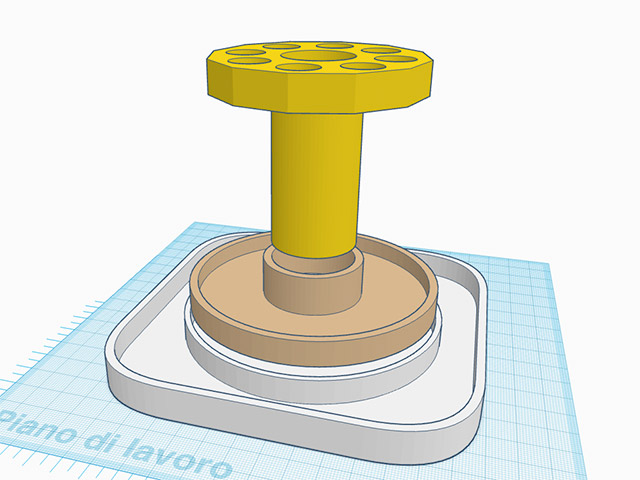
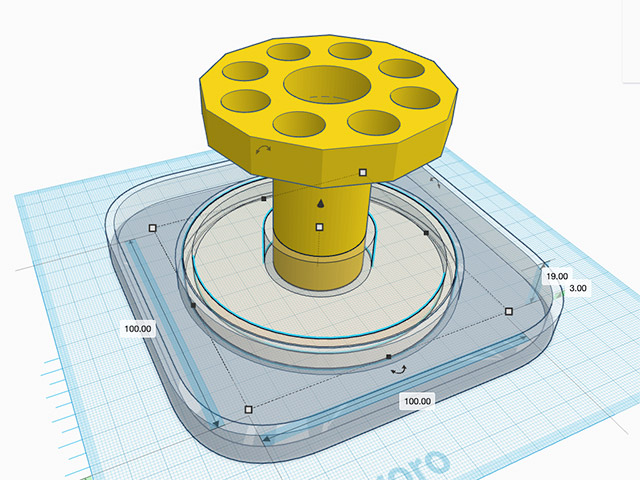
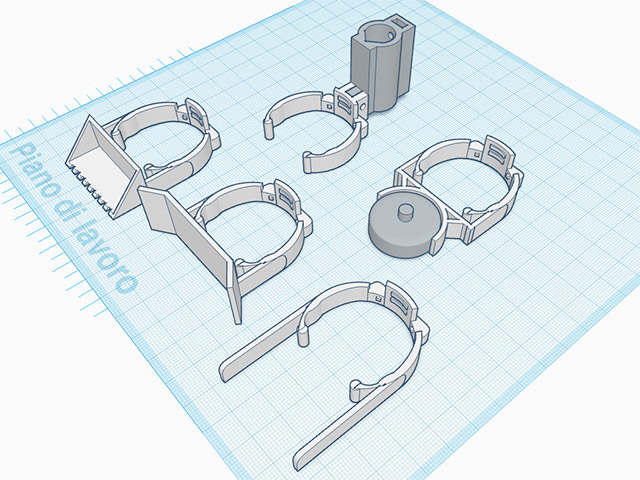
Modelli 3D (punta + tappo)
- Punta 3D: bussola con sede per inserto a stella; si incolla e si “calza” sul bamboo.
- Tappo superiore: tappo chiuso con leggero smusso, foro opzionale per fascetta dei guantoni.
Seguire il link su Thingiverse.
Suggerimenti di stampa
- Materiale: PETG (resiste a umidità e urti).
- Layer: 0,20 mm – Gusci: 4 – Infill: 40–60% (a griglia/gyroid).
- Orienta la punta in modo che gli sforzi siano lungo gli strati (filetti perpendicolari alla spinta).
- Se usate PLA, considerare una laccatura con vernice poliuretanica per protezione.
AVVERTENZE
- Queste bacchette artigianali non sono certificate; usatele su percorsi facili e verifica spesso l’integrità del bamboo (crepe/filamenti).
- Evitate pendii rocciosi o terreno ghiacciato.
- Controllate periodicamente la presa dell’inserto e l’adesione dei pezzi 3D.
- Se praticate NW con istruttore, confrontate lunghezze e tecnica.
Buon fine settimana a tutti 🙂