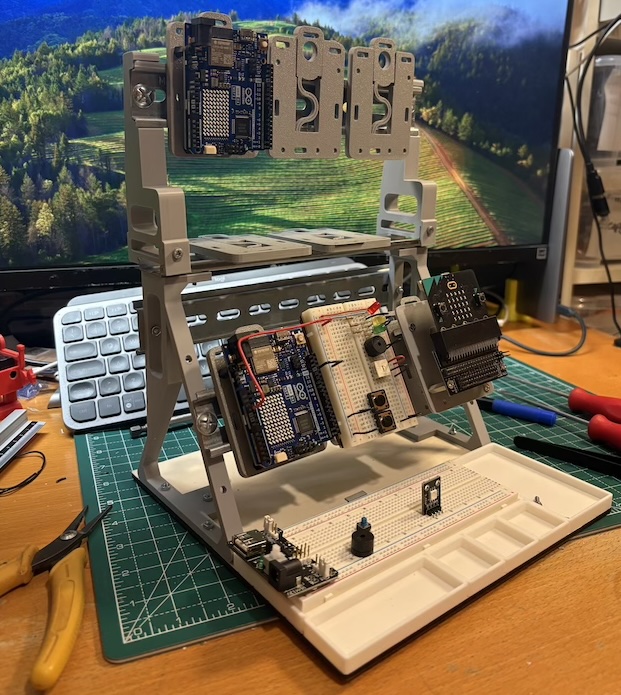
Quest’anno sto supportando, con attività di sperimentazione pratica, anche classi non mie, proponendo laboratori motivanti per riaccendere curiosità e partecipazione. La prossima settimana lavorerò con una terza elettronica numerosa ed eterogenea, non semplice da gestire nei laboratori tradizionali. Per questo, insieme ai colleghi, abbiamo scelto di spostare la lezione nel Laboratorio Territoriale (LTO), uno spazio ricco di attrezzature “inusuali” per un normale laboratorio scolastico: il contesto giusto per stuzzicare l’attenzione e rendere concreti gli apprendimenti su Arduino.
Stato iniziale della classe:
- hanno svolto le primissime prove con Arduino (blink e poco altro);
- conoscono le variabili e hanno un’idea dei tipi di dato;
- sanno riconoscere e usare pulsanti, interruttori, deviatori e LED.
L’obiettivo della lezione è mettere insieme questi elementi in un compito pratico, semplice ma significativo: progettare e realizzare un piccolo controller di luce che usa pulsante, interruttore/deviatore e LED, approfondendo al tempo stesso nozioni base di programmazione (lettura ingressi, gestione del tempo con millis() o delay(), piccola logica a stati AUTO/MANUALE).
Desidero che gli studenti vedano subito un risultato, si divertano a farlo funzionare e, passo dopo passo, consolidino lessico, metodo e fiducia.
Questa lezione sarà suddivisa in tre parti, due introduttive (ed ognuna con attività aggiuntive facoltative) che condurranno alla terza parte conclusiva in cui gli studenti dovranno realizzare il sistema completo.
In ogni fase viene mostrato:
- diagramma di flusso;
- pseudocodice;
- schema di collegamento;
Lo studente deve realizzare lo sketch Arduino di ogni fase.
Come sempre amo introdurre il problema usando una narrazione coinvolgente e visto che mi piace la fantascienza andremo con i ragazzi su Marte. 🙂
Base marziana ELYSIUM
Siete il tecnico elettronico della base marziana. È stato inaugurato un nuovo modulo abitativo e, durante lo spostamento di carichi nel tunnel pressurizzato che collega la serra alla cupola, un carrello radiocomandato ha urtato la parete, provocando una micro-frattura con inizio di depressurizzazione. L’intervento rapido di un manutentore ha evitato il peggio. Dalle analisi emergono due cause principali: affaticamento del personale in turno e illuminazione insufficiente nel corridoio. Per prevenire incidenti e ridurre i consumi, il comando vi incarica di realizzare un controller luce “low-power”: in AUTO la luce si accende per pochi secondi quando viene rilevato il passaggio (lo simulerete con un pulsante); in MANUALE rimane attiva per la durata delle ispezioni EVA (Extra-Vehicular Activity). Il progetto deve essere affidabile, parsimonioso nei consumi e conforme agli standard di sicurezza della base, così da superare senza riserve la verifica dei consumi energetici imminente.
Per evitare che un bug in un solo componente comprometta l’intero sistema, decidete di scomporre il problema e validare separatamente i due comportamenti critici, prima di integrarli.
- Prima prova – “Solo PULSANTE” (sensore di passaggio)
Nel banco di test allestito accanto al tunnel, il tecnico simula l’evento di passaggio con un pulsante. Alla pressione del pulsante la luce si accende un un determinato tempo e poi si spegne.
(Facoltativo) Sperimentate anche la variante in cui la luce reagisca con un ping di cortesia temporizzato e che non riparta finché il pulsante resta premuto (niente retrigger). Questo serve a scongiurare illuminazioni troppo lunghe dovute a rimbalzi o pressioni involontarie: energia salva, rischio ridotto. - Seconda prova – “Solo INTERRUTTORE” (modalità MANUALE)
Il tecnico realizza il comando manuale: ON = luce stabile, OFF = buio. Qui controlla la priorità operativa.
(Facoltativo) Sperimentate anche il feedback all’inserimento, due lampeggi rapidi. Quando si passa a ON: due lampeggi veloci e poi resta acceso.
Superate queste due verifiche, il tecnico procede alla versione finale: unendo AUTO (pulsante) e MANUALE (interruttore) nello stesso controller, con la regola d’oro: MANUALE ha sempre priorità. È così che il progetto rispetta il protocollo Zero-Disturb e arriva pronto alla verifica dei consumi energetici.
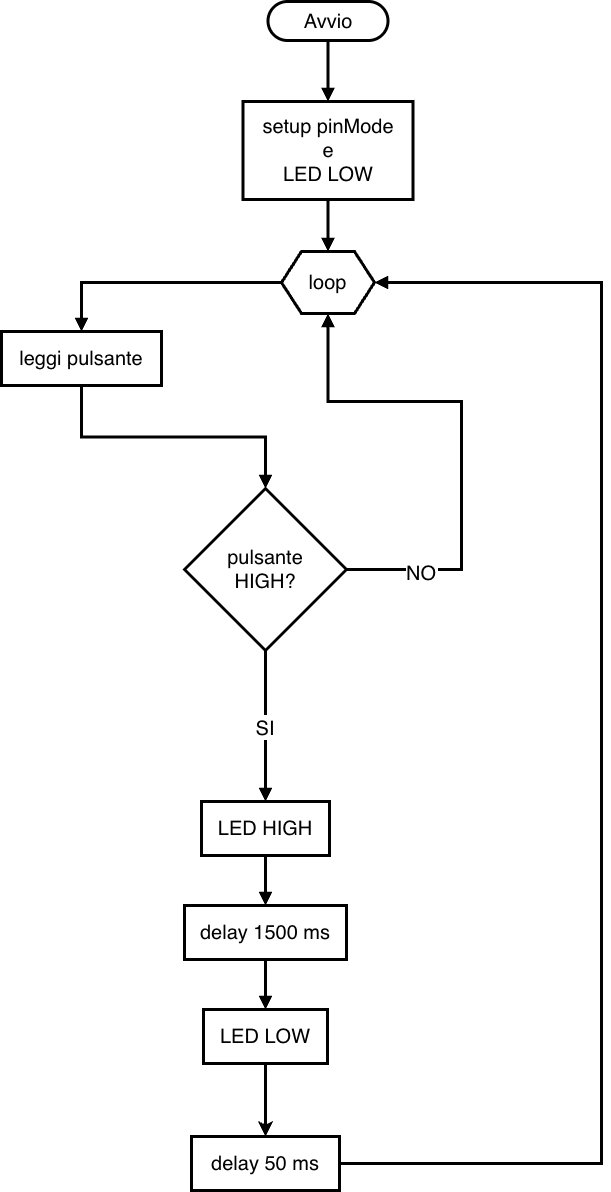
Prima prova – “Solo PULSANTE” (sensore di passaggio)
Esercizio: realizzare lo sketch Arduino che permette di realizzare questa prima prova.

Diagramma di flusso
Pseudocodice
INIZIO
imposta PIN_LED come USCITA
imposta PIN_PULSANTE come INGRESSO
scrivi PIN_LED = LOW
RIPETI PER SEMPRE
statoPulsante ← leggi(PIN_PULSANTE) // HIGH = premuto (pull-down esterno)
SE statoPulsante è HIGH ALLORA
scrivi PIN_LED = HIGH
attesa 1500 ms
scrivi PIN_LED = LOW
attesa 50 ms
FINE SE
FINE RIPETI
FINE
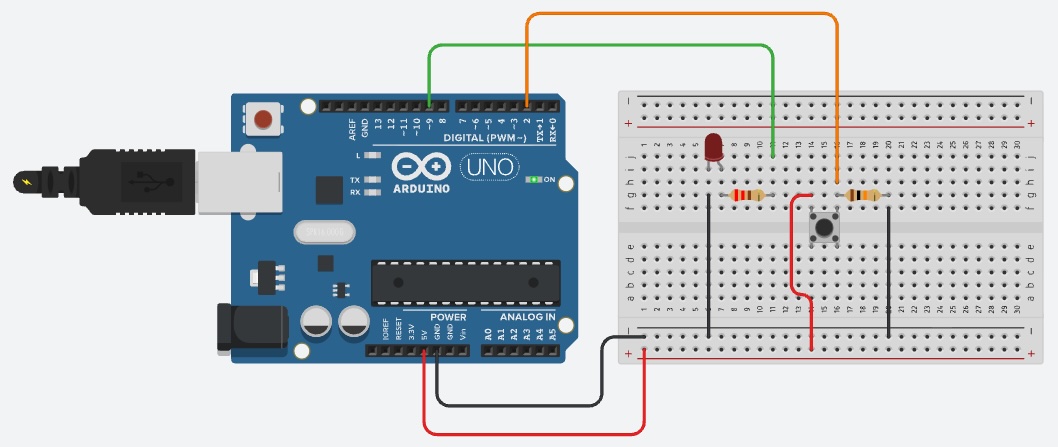
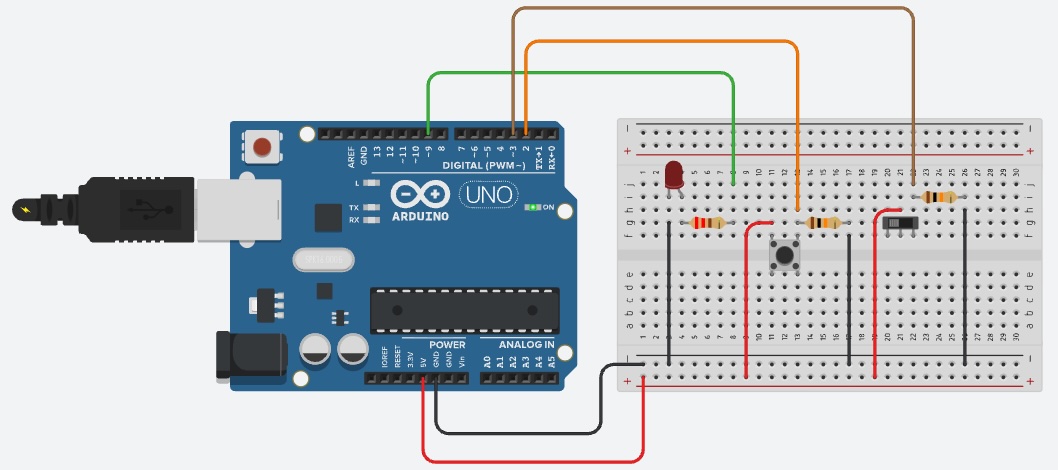
Schema di collegamento
Prima prova – “Solo PULSANTE” (sensore di passaggio) – variante che evita il retrigger
Esercizio: realizzare lo sketch Arduino che permette di realizzare la variante della prima prova.
-
- Premo > LED acceso ~1,5 s > poi spento.
- Tenendo premuto non riparte; riparte solo dopo il rilascio.
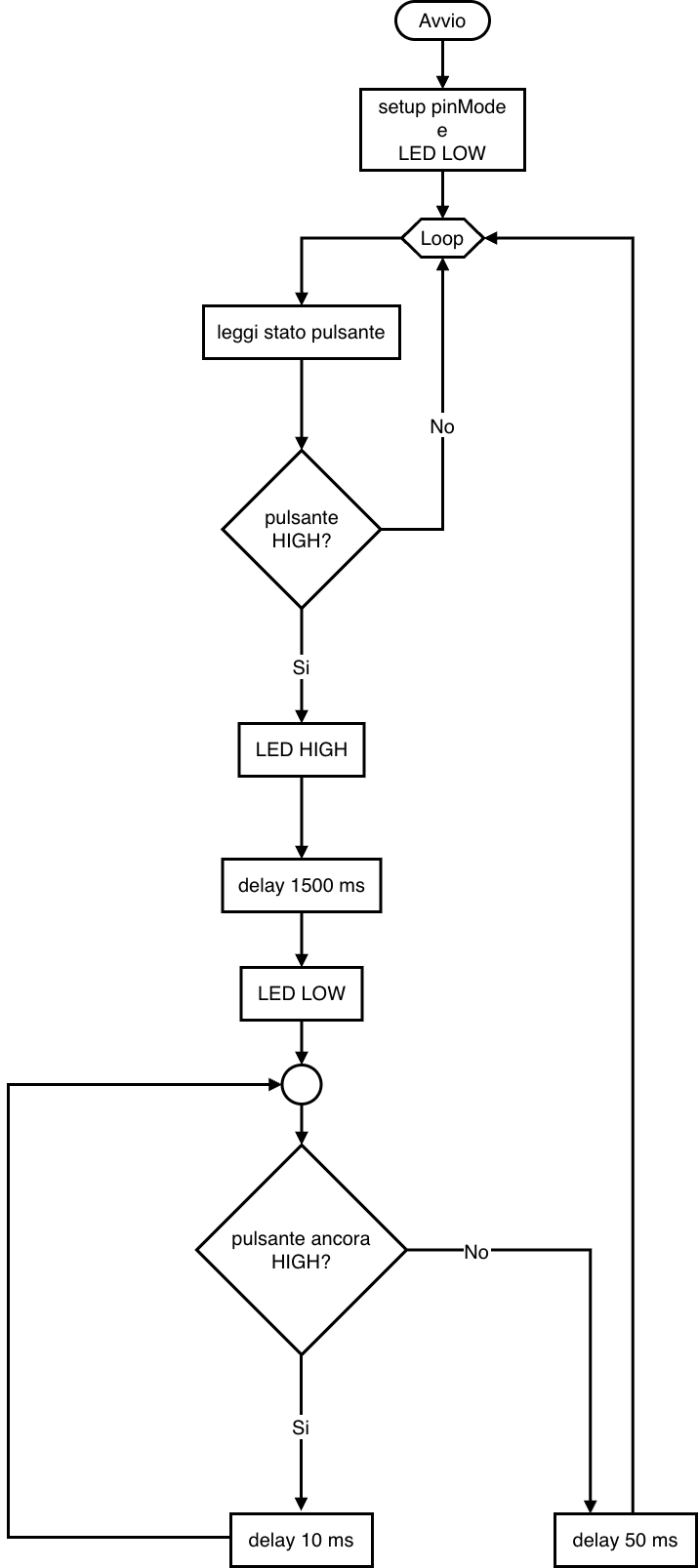
Diagramma di flusso – versione che evita il retrigger
Pseudocodice – versione che evita il retrigger
INIZIO
// Setup
imposta PIN_LED come USCITA
imposta PIN_PULSANTE come INGRESSO
scrivi PIN_LED = LOW
RIPETI PER SEMPRE // loop
statoPulsante ← leggi(PIN_PULSANTE)
SE statoPulsante è HIGH ALLORA // pulsante premuto
scrivi PIN_LED = HIGH // accendi luce di cortesia
attesa 1500 ms // delay 1,5 s
scrivi PIN_LED = LOW // spegni
// attesa rilascio per evitare retrigger continui
MENTRE leggi(PIN_PULSANTE) è HIGH FAI
attesa 10 ms
FINE MENTRE
attesa 50 ms // piccolo anti-rimbalzo
FINE SE
FINE RIPETI
FINE
Seconda prova – “Solo INTERRUTTORE” (modalità MANUALE)
Esercizio: realizzare lo sketch Arduino che permette di realizzare questa seconda prova.
- Interruttore ON > LED acceso fisso. (1500 ms)
- Interruttore OFF > LED spento.
Prevedere un anti-rimbalzo realizzato con un delay di 50 ms.

Diagramma di flusso
Pseudocodice
INIZIO
imposta PIN_LED come USCITA
imposta PIN_PULSANTE come INGRESSO
scrivi PIN_LED = LOW
RIPETI PER SEMPRE
statoPulsante ← leggi(PIN_PULSANTE) // HIGH = premuto (pull-down esterno)
SE statoPulsante è HIGH ALLORA
scrivi PIN_LED = HIGH
attesa 1500 ms
scrivi PIN_LED = LOW
attesa 50 ms
FINE SE
FINE RIPETI
FINE
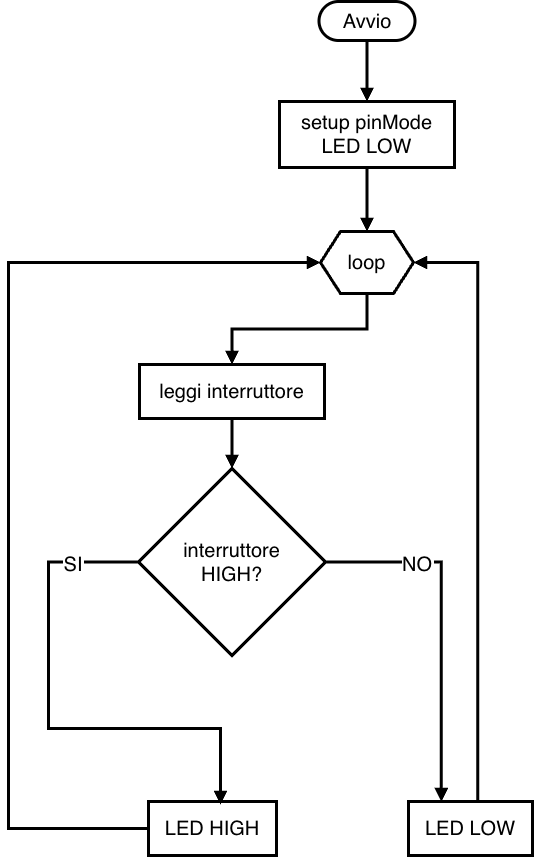
Diagramma di flusso
Pseudocodice
INIZIO
// Setup
imposta PIN_LED come USCITA
imposta PIN_INTER come INGRESSO
scrivi PIN_LED = LOW
RIPETI PER SEMPRE // loop
statoInterruttore ← leggi(PIN_INTER) // HIGH = MANUALE ON (con pull-down esterno)
SE statoInterruttore è HIGH ALLORA
scrivi PIN_LED = HIGH // LED acceso
ALTRIMENTI
scrivi PIN_LED = LOW // LED spento
FINE SE
FINE RIPETI
FINE
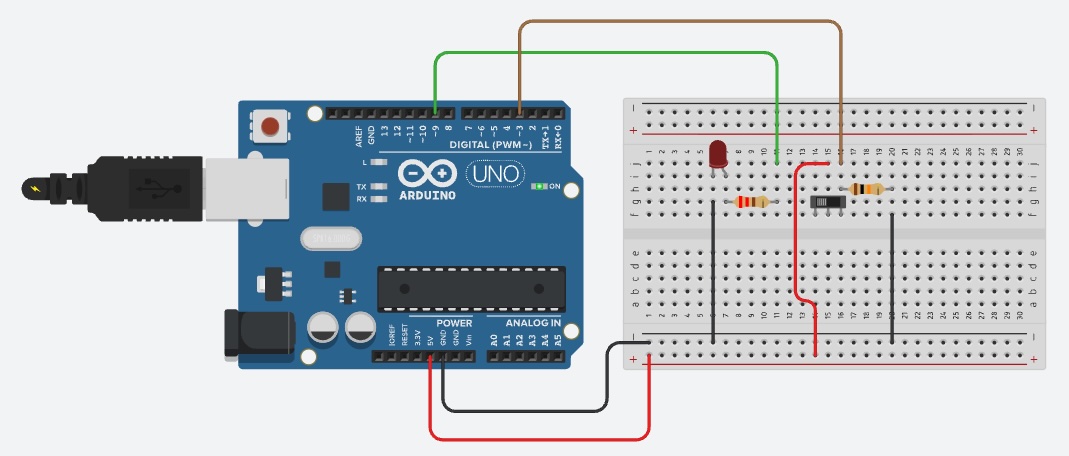
Schema di collegamento
Seconda prova (facoltativo) – “Solo INTERRUTTORE” (modalità MANUALE) – variante con feedback all’inserimento
Per il feedback prevedere un accensione e spegnimento del LED per 3 cicli da 80 ms
Diagramma di flusso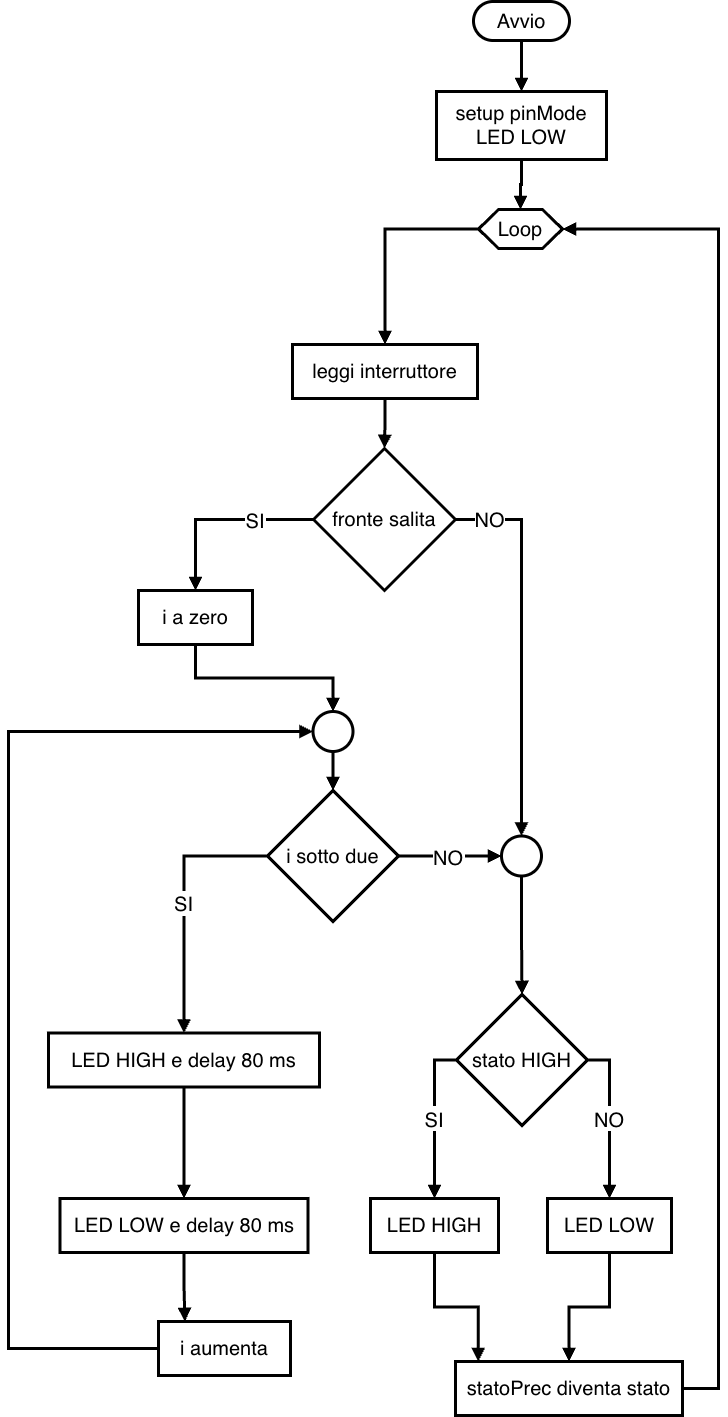
Pseudocodice – variante con feedback all’inserimento
INIZIO
// Setup
imposta PIN_LED come USCITA
imposta PIN_INTER come INGRESSO // pull-down esterno
scrivi PIN_LED = LOW
statoPrec ← LOW
RIPETI PER SEMPRE
stato ← leggi(PIN_INTER) // HIGH = MANUALE ON
// Rilevazione fronte di salita (OFF -> ON)
SE (stato = HIGH) AND (statoPrec = LOW) ALLORA
PER i da 0 a 1 FAI // due lampeggi rapidi
scrivi PIN_LED = HIGH
attesa 80 ms
scrivi PIN_LED = LOW
attesa 80 ms
FINE PER
FINE SE
// Stato stabile della modalita MANUALE
SE (stato = HIGH) ALLORA
scrivi PIN_LED = HIGH
ALTRIMENTI
scrivi PIN_LED = LOW
FINE SE
statoPrec ← stato
FINE RIPETI
FINE
Realizzazione del sistema completa

Esercizio 03: realizzare lo sketch Arduino che permette di realizzare l’intero sistema.
- manuale ON? = interruttore HIGH
- pulsante premuto? = pulsante HIGH
- timer attivo? = millis() prima di tScadenza (luce ancora entro i 5 s)
Diagramma di flusso
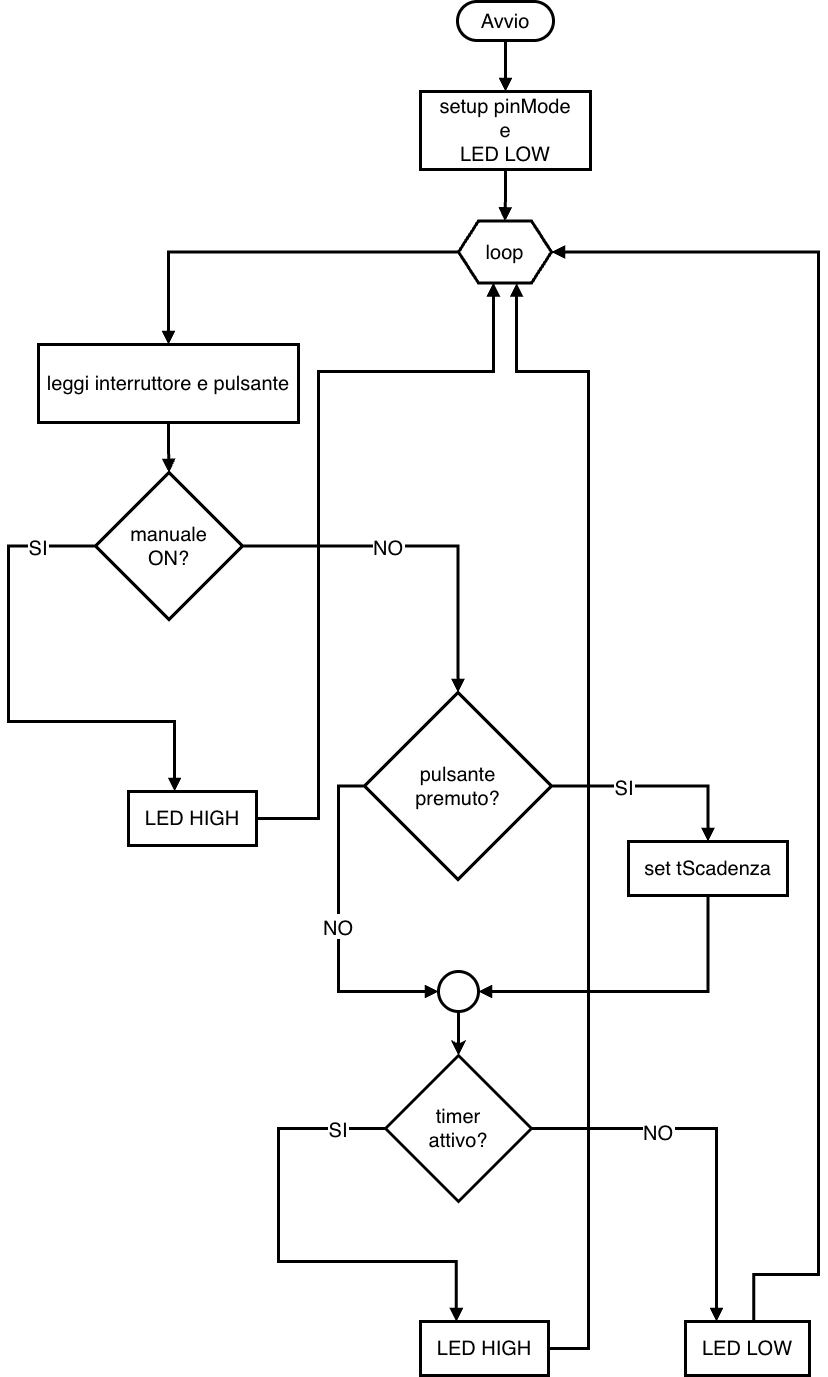
Pseudocodice
INIZIO
// Setup
imposta PIN_LED come USCITA
imposta PIN_PULSANTE come INGRESSO
imposta PIN_INTER come INGRESSO
scrivi PIN_LED = LOW
tScadenza ← 0
DURATA_MS ← 5000
RIPETI PER SEMPRE // loop
// Lettura ingressi
statoInterruttore ← leggi(PIN_INTER) // HIGH = MANUALE ON (pull-down esterno)
statoPulsante ← leggi(PIN_PULSANTE) // HIGH = pulsante premuto
// Significato applicativo
manuale ← (statoInterruttore è HIGH)
premuto ← (statoPulsante è HIGH)
SE manuale ALLORA
scrivi PIN_LED = HIGH // LED acceso fisso in MANUALE
ALTRIMENTI
SE premuto ALLORA
tScadenza ← tempoCorrenteMs() + DURATA_MS
FINE SE
SE tempoCorrenteMs() < tScadenza ALLORA // timer attivo?
scrivi PIN_LED = HIGH // LED acceso (luce di cortesia)
ALTRIMENTI
scrivi PIN_LED = LOW // LED spento
FINE SE
FINE SE
FINE RIPETI
FINE
Schema di collegamento
Buon Coding a tutti 🙂