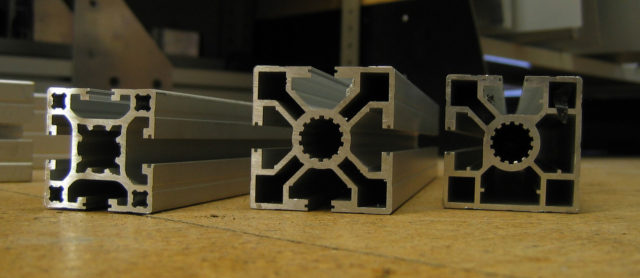
A livello indutriale il framing è una metodo costruttivo impiegata nell’automazione industriale fin dagli anni 30′ tra le più note è il T-Slot framing che mediante profilati in alluminio a sezione quadrata e fessure a T, da cui T-Slot, mediante una serie di connettori è possibile realizzare qualsiasi tipo di struttura, dai frame per le stampanti 3D ai banchi di lavoro industriali, robot, supporti per strumenti da laboratorio e molto altro.
Fonte Wikipedia
La caratteristica modulare dei profilati su fessure a T, in genere su tutti i lati permette una libertà di costruzione notevole. Sul mercato è possibile trovare diverse tipologie di T-Slot: OpenBeam, MakerBeam, MicroMax, 80/20
Ho utilizzato ed utilizzo tutt’ora i T-Slot, però in alcune occasioni può essere utile utilizzare altre tipologie di strutture.
L’uso dei T-slot in alcune occasioni può diventare ingombrante ed anche costoso, soprattutto per l’aumento, nell’ultimo periodo, del costo della materia prima, l’alluminio, pertanto in alcune mie recenti sperimentazioni ho preferito adottare altre strategie, più economiche e facili da produrre, in legno e poi in plastica.
La necessità sempre più frequente di dare forma fisica ai progetti STEAM mi ha fatto riflettere su come da bambino giocavo e costruivo, il meccano e i Lego, il trafonro ed il compensato erono la base da bambinoi. Il metodo “meccano” lo ritroviamo in moltissimi kit didattici, pertanto ho voluto riprendere l’idea ma in una modalità credo più semplice.
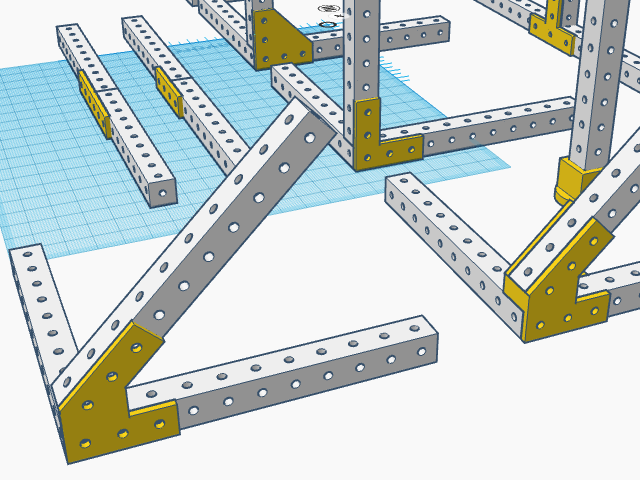
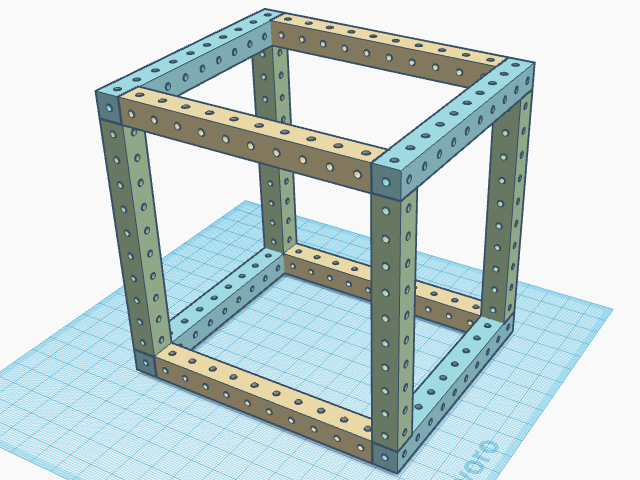
Nelle mie sfide personali di Making, “5 min. da Maker” ho abbozzato su carta il progetto da cui poi è nato EduRobot beam. Le bacchette sono lunghe 100 mm con fori su tutti i lati da 3 mm di diametro ad una distanza di 10 mm l’uno dall’altro, in aggiunta ho realizzato degli elementi di aggancio di varie forme. On-line trovate soluzioni similari, io ho realizzato una mia versione che spero possa essere utile e personalizzata anche ad altri.
In che modo utilizzo gli EduRobot beam:
- prototipazione rapida di robot didattici
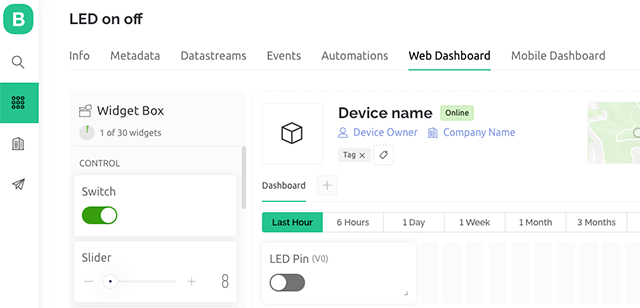
- OpnePLC. Un unico rack su cui disporre Raspberry Pi come unità server ed Arduino come I/O
- stazione meteo
- sistema domotico
La modularità mi permette quindi di gestire in modo ordinato ed economico molte tipologie di progetti STEAM.
Per prelevare i sorgenti grafici per la stampa 3D seguire il LINK.
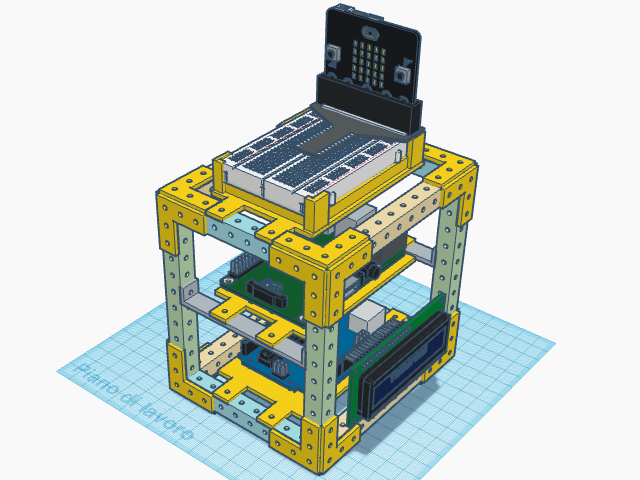
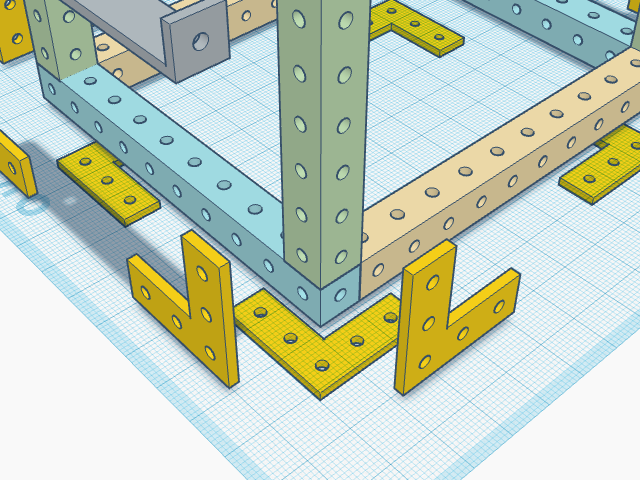
Per la costruzione allego alcune fotografie che dettagliano la modalità di incastro.
Vista esplosa della struttura di base
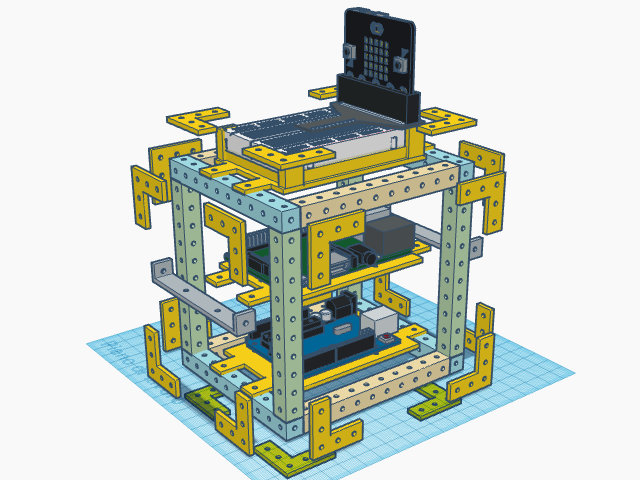
Dettaglio esploso senza schede elettroniche
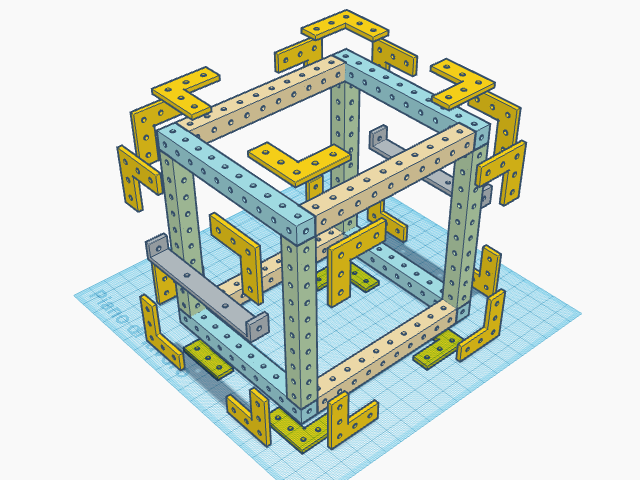
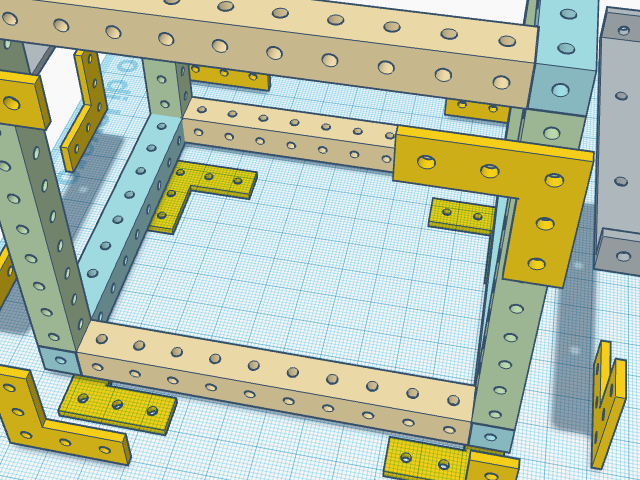
Ordine di assemblaggio della struttura portante
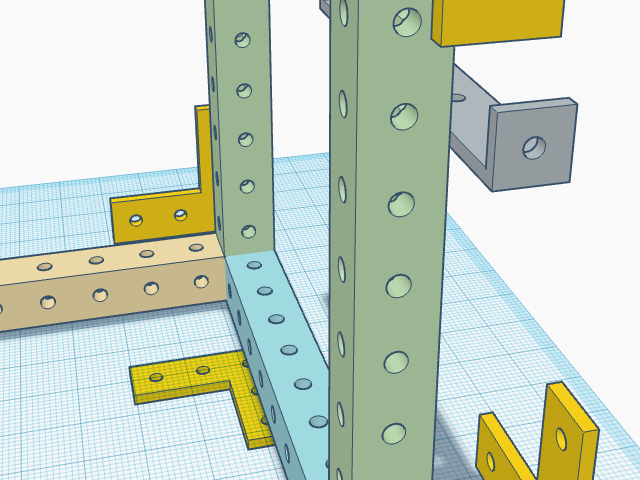
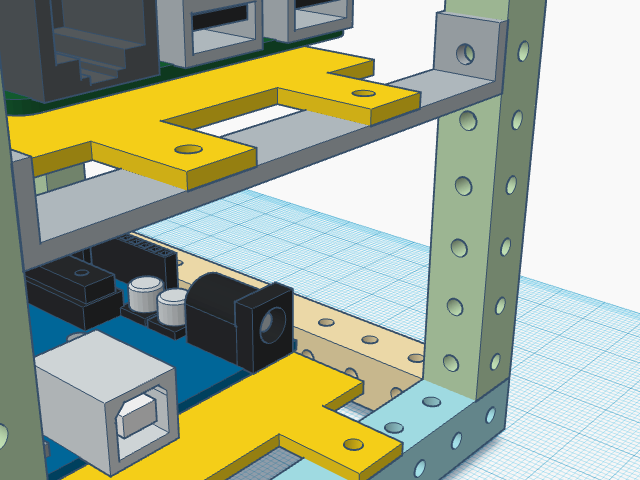
Dettaglio struttura portante ed L di blocco
Dettaglio struttura portante ed L di blocco
Dettaglio supporto scheda
Dettaglio supporto scheda
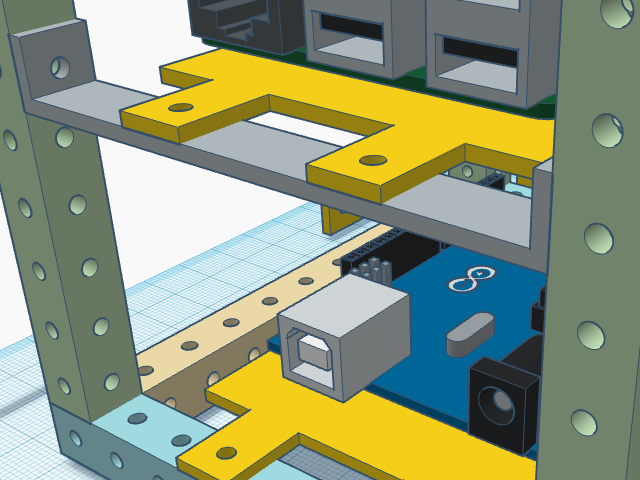
Dettaglio supporto scheda
Buon Making a tutti.