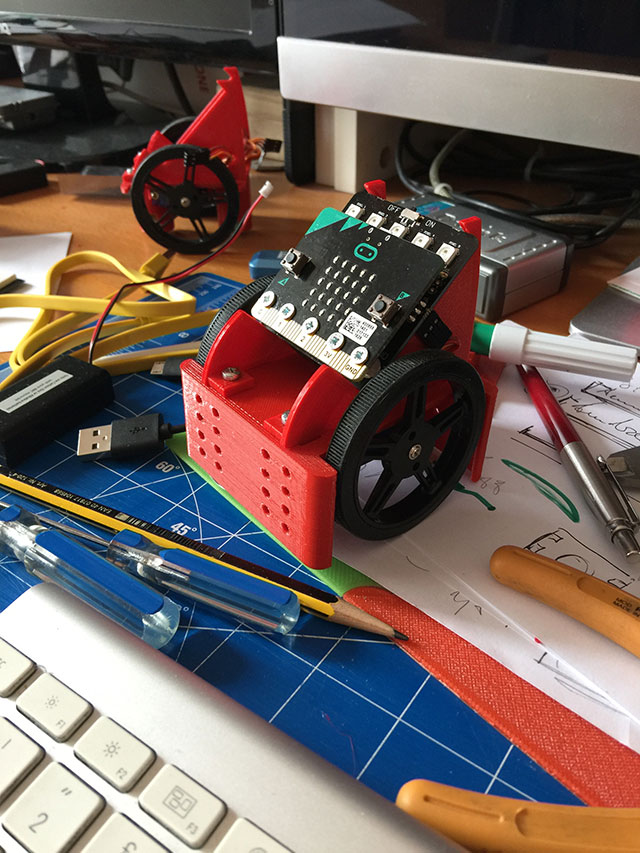
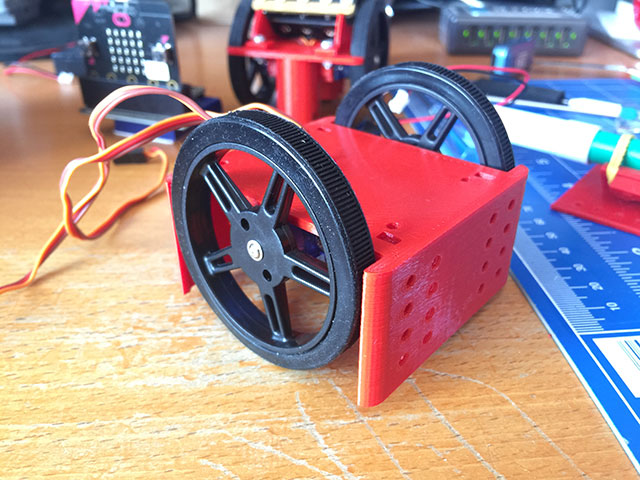
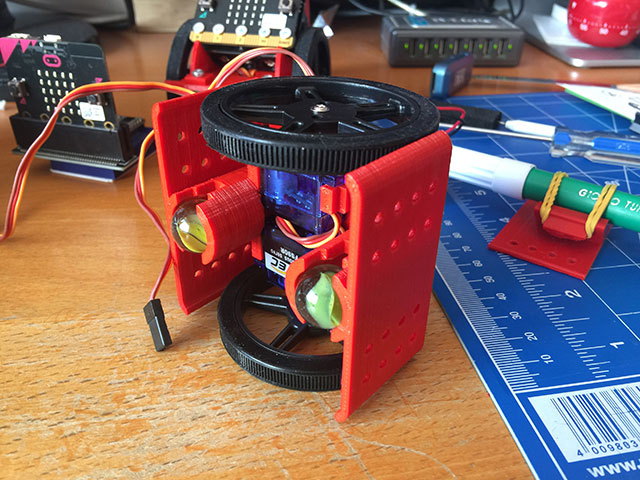
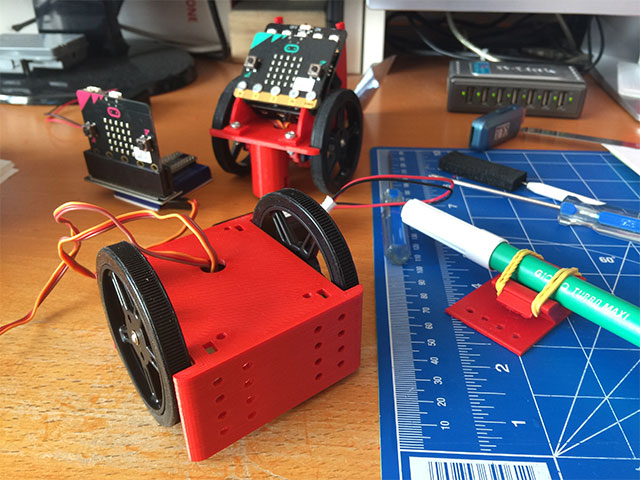
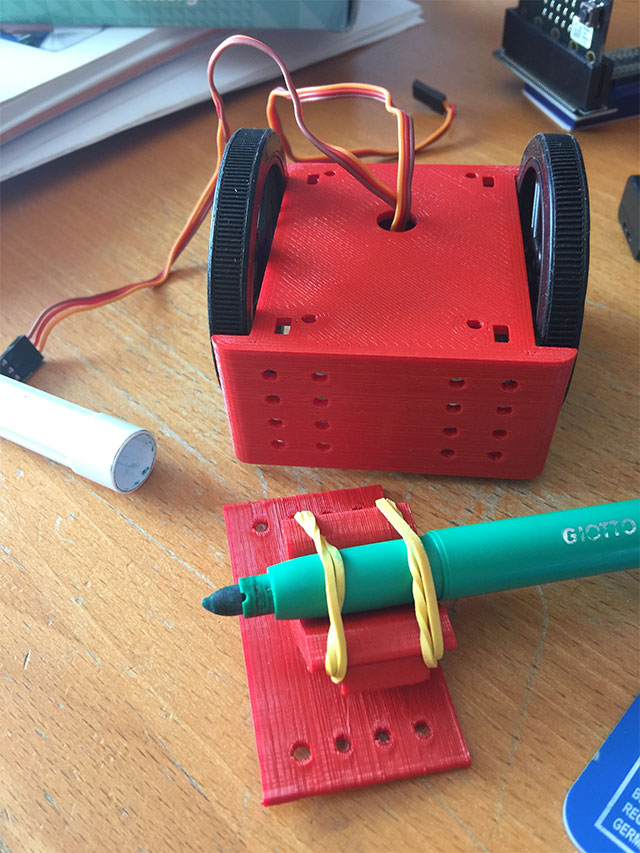
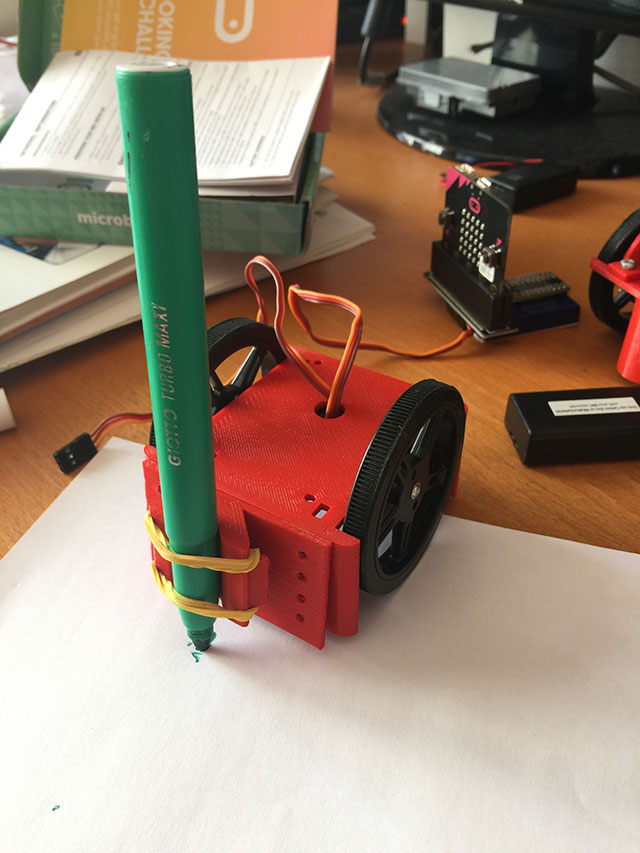
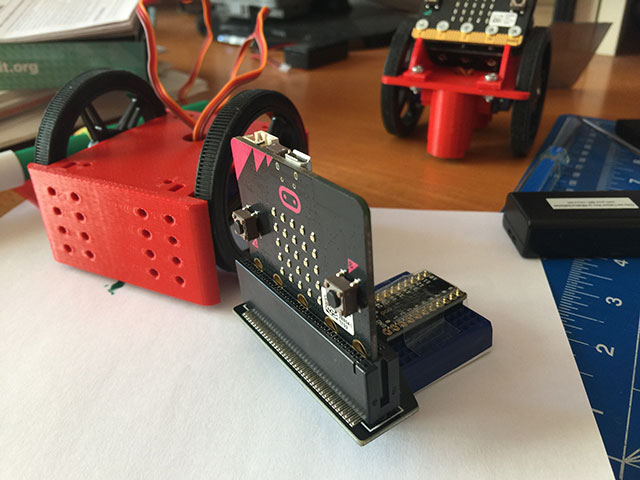
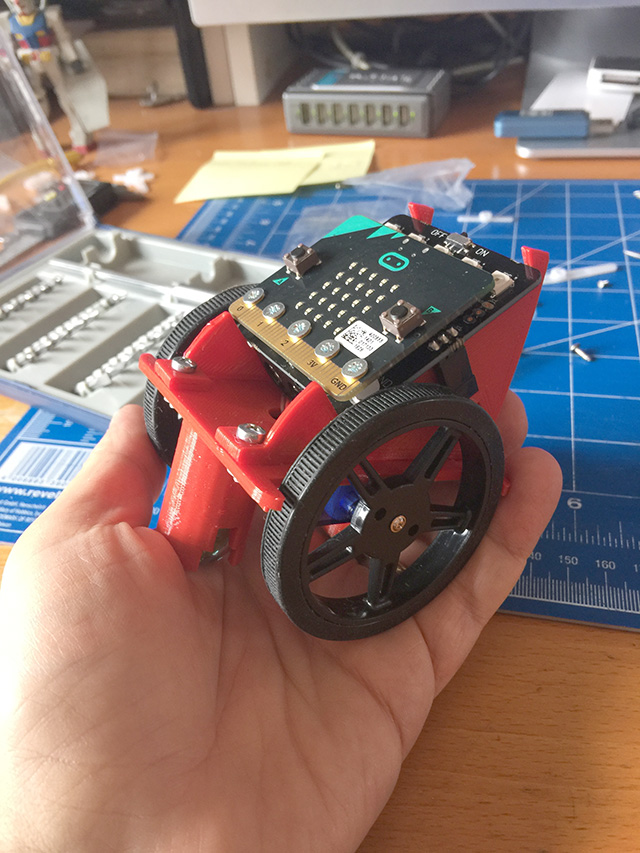
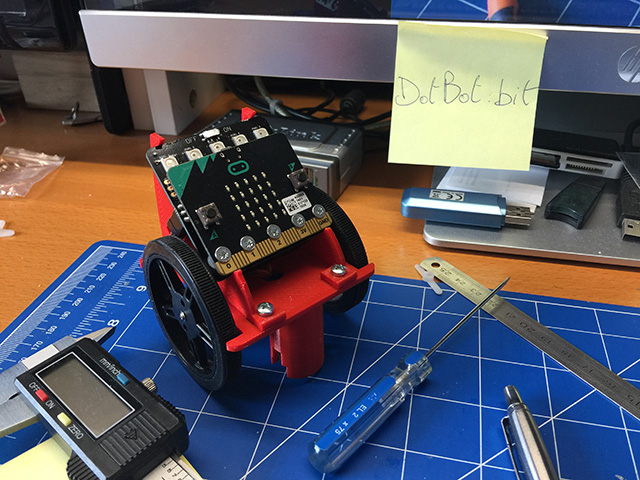
Sto apportando in queste ore alcune modifiche sulle dimensioni e sulle modalità di utilizzo dell’ultimo nato della famiglia DotBot, il piccolo DotBot:bit, ne ho variato leggermente le dimensioni, attualmente l’area di occupazione è di 75×75 mm, sufficientemente piccolo per essere comodo da trasportare e da usare in ogni classe. Alcuni miglioramenti apportati al sistema di aggancio del micro:bit e della scheda per il pilotaggio dei servo, scheda dotata anche 5 led RGB.
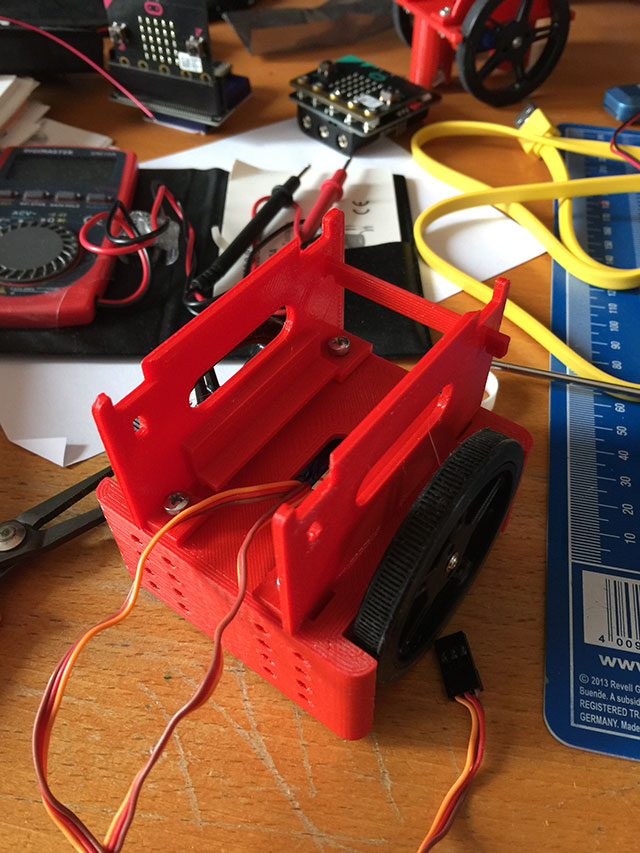
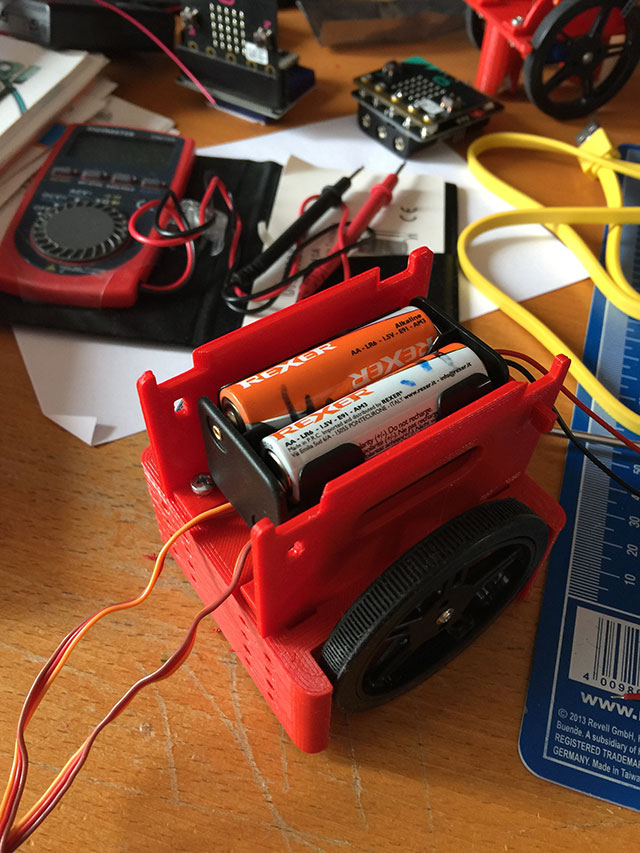
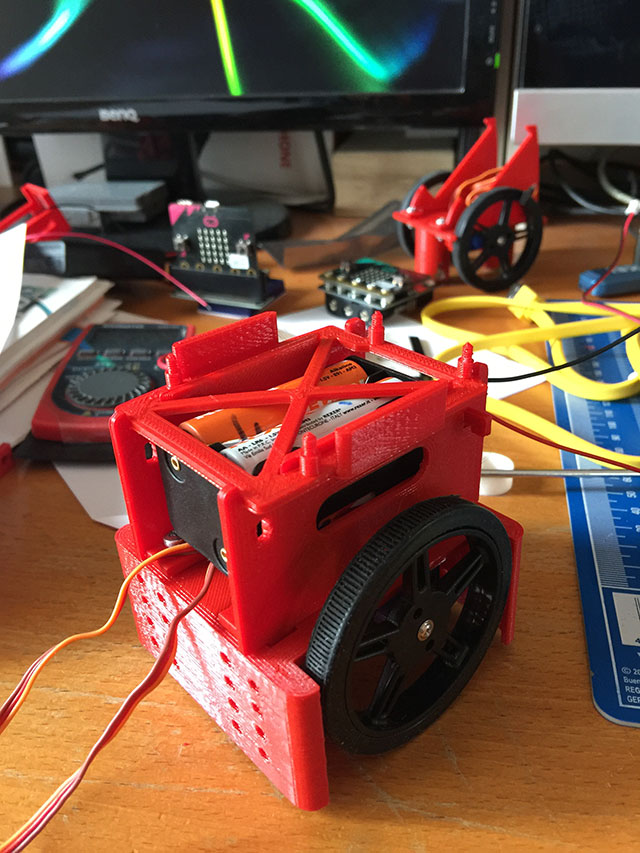
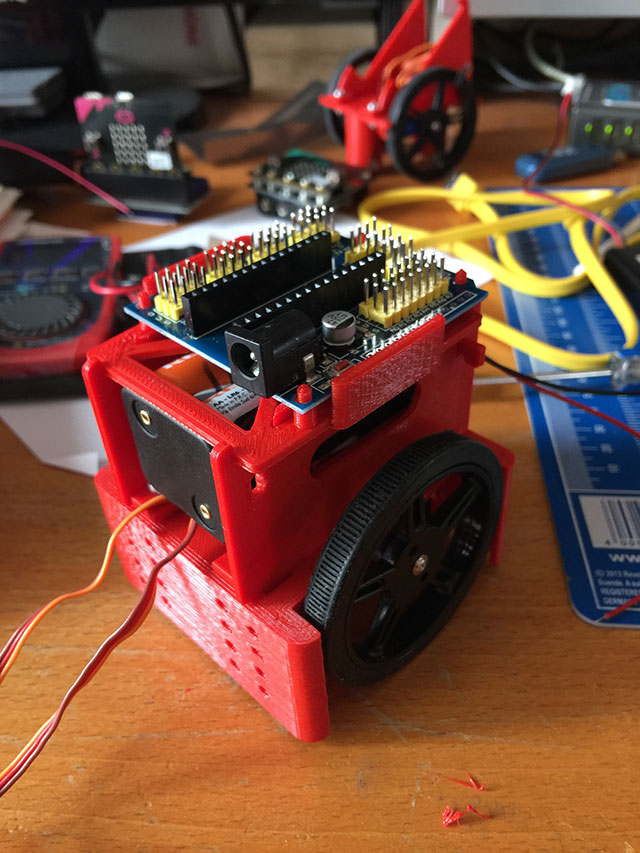
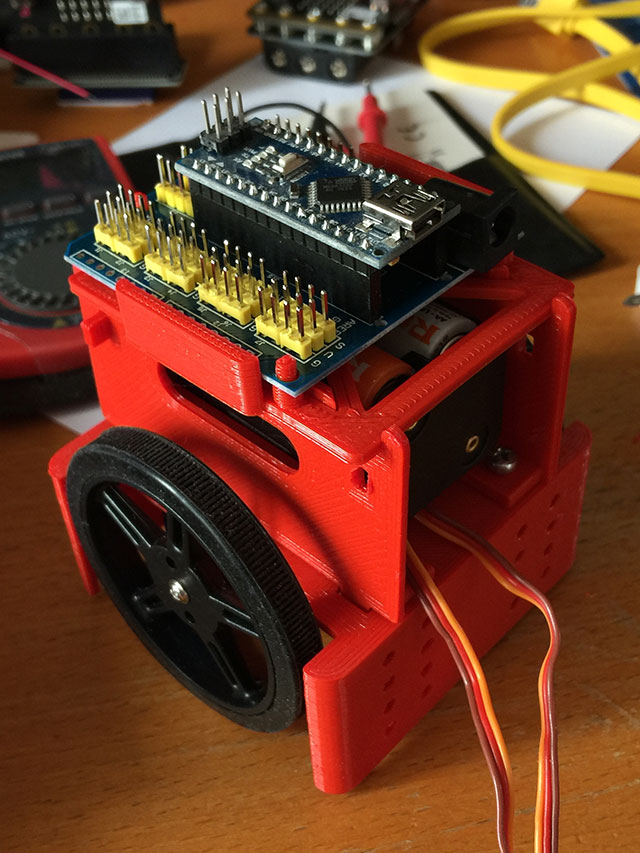
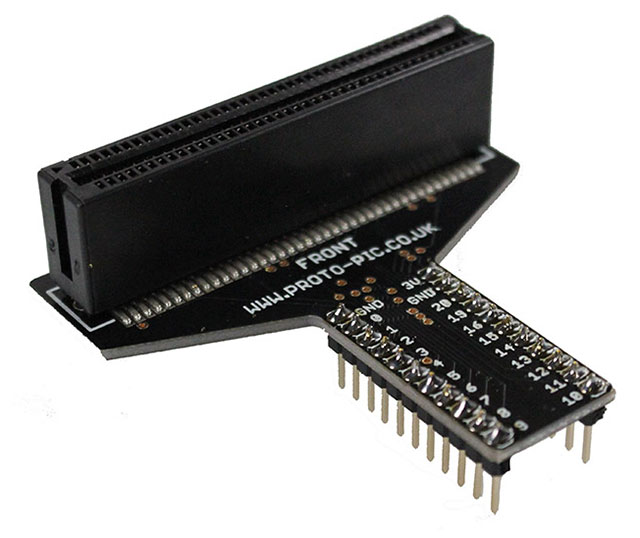
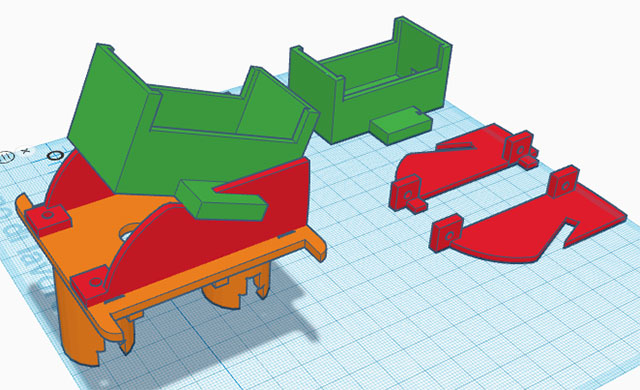
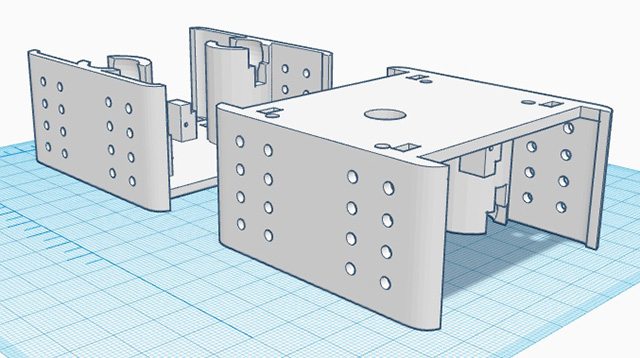
Nelle immagini è possibile vedere la versione Truck che consente l’aggancio di ulteriori dispositivi. Pubblicherò nel breve i sorgenti grafici per la stampa 3D. Ho sviluppato inoltre un primo prototipo di struttura per ospitare un Arduino Nano (nella foto una versione compatibile) inserito su una extension board che rende più agevole il collegamento tra i vari dispositivi del robot.
Tutti gli elementi si incastrano, sono solo presenti 4 viti M3 con i rispettivi dadi.
Attualmente in fase di disegno:
- struttura per ospitare sensore ad ultrasuoni
- sensori ad infrarossi
- struttura per gare sumo
- struttura per ospitare Raspberry Pi Zero W
- struttura per ospitare un Raspberry Pi 3
Mi sono dato alcuni giorni di tempo per concludere l’intero progetto, forse qualcuno avrà intuito l’intento nel realizzare un oggetto molto piccolo ed estremamente versatile da utilizzare con la tecnologia che più si preferisce, quindi programmazione in JavascripBlock Editor, MicroPython, C, Scratch, Visualino, mBlock ed altro con l’elettronica che si vuole.
Mi sto affezionando a questo “piccolino” sarà il caso di aggiungere un po’ di espressività? Un display oled e un po’ di interazione con bot Telegram potrebbero essere interessanti, ma perché non usarlo con la piattaforma di programmazione basata su ROS di HotBlackROBOTICS?
…ci sto lavorando 😉
Buon Coding a tutti.