Come sapete da anni utilizzo BBC micro:bit perché è uno strumento versatile ed utilizzabile in diversi ordini di scuola e permette di fare agevolmente Physical Computing.
Come sapete da anni utilizzo BBC micro:bit perché è uno strumento versatile ed utilizzabile in diversi ordini di scuola e permette di fare agevolmente Physical Computing.
L’architettura hardware e software di micro:bit è stata studiata soprattutto per renderla accessibile ed usabile anche agli studenti più piccoli della scuola primaria. Spesso però accade che i giovani studenti manifestano difficoltà nella lettura del testo o dei numeri utilizzati all’interno del Make Editor di micro:bit; per superare questo problema da qualche tempo è disponibile MicroCode che funziona con BBC micro:bit V2, le caratteristiche di questo editor sono:
- Editor di codice e linguaggio di programmazione strutturato, basato su icone, adatto ai bambini
- In tempo reale, il codice viene scaricato sul micro:bit ad ogni modifica
- Navigazione basata sul cursore con tastiera (compatibile con l’accesso tramite switch), mouse, touch, supporto screen reader
- Supporta accessori aggiuntivi (LED, servi, …) tramite Jacdac
- L’editor è tradotto in oltre 20 lingue.
Durante i miei prossimi corsi sul Coding e Game Design, che partiranno da settembre prossimo indirizzati a docenti della scuola primaria, mostrerò l’utilizzo anche di MicroCode e come sempre consegnerò schede di lavoro utilizzabili con gli studenti in classe.
Come azione propedeutica desidero iniziare su queste pagine un corso gratuito per chi poi seguirà le mie azioni formative in modo da accelerare la fase di utilizzo dell’interfaccia di sviluppo per poi concentrarsi sulle attività pratiche.
Pubblicherò da oggi una serie di post brevi sul MicroCode programming language che riprendono quanto esposto sul sito ufficiale, a cui però farò qualche variazione, spero possa servire.
Vediamo come avviare il programma e campiamo la struttura del linguaggio di programmazione.
L’ambiente di sviluppo è totalmente online pertanto colleghiamoci a MicroCode
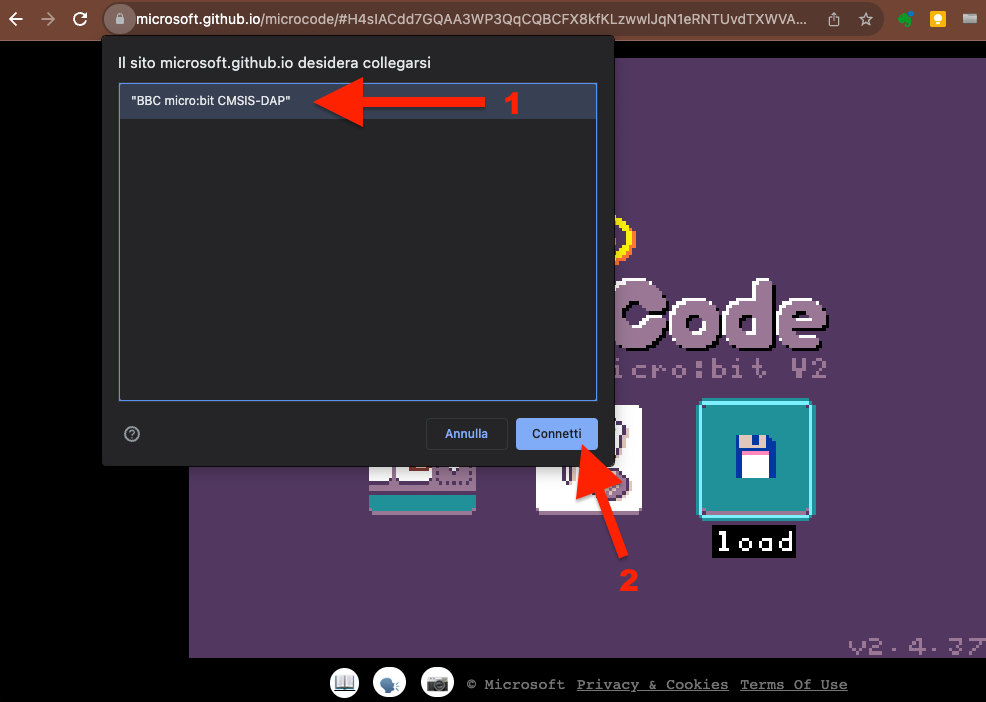
La schermata iniziale dettaglia la procedura di configurazione

- Collegate il vostro micro:bit V2 al computer utilizzando il cavo USB. (micro:bit V1 non è supportato)
- Clic su “Download MicroCode” e trasferitelo sul micro:bit

- Aspettate il riavvio del micro:bit.
- Selezionare “BBC micro:bit CMSIS-DAP” e premere su “Connetti” nella finestra di dialogo.
- Usate l’editor per dare vita al micro:bit! 🙂
- Il programma di default verrà immediatamente scaricato sul micro:bit ed eseguito e funzionerà anche se sconnettiamo il micro:bit dal computer e ad esso connettiamo un pacco batterie.

Il linguaggio MicroCode è strutturato in pagine, ogni pagina contiene una lista di regole, e ogni regola è composta da una sezione “When” (Quando) e una sezione “Do” (Fai), ciascuna di queste due sezioni ha una propria lista di blocchi di programmazione.
MicroCode supporta eventi, condizioni sugli eventi, sequenze, cicli, variabili e operazioni aritmetiche semplici (per ora solo l’addizione) su costanti e variabili. Vedremo più avanti una lista di esempi che sfrutta tutte queste funzioni.
Nella prossima lezione approfondiremo l’uso dell’interfaccia e del linguaggio di programmazione.
Buon Coding a tutti 🙂