Ogni anno rivivo la stessa situazione: colleghi motivati, studenti curiosi, qualche kit in laboratorio… e poi l’ostacolo vero, quello che nessun manuale risolve da solo: come rendere la robotica sostenibile, replicabile e davvero “per tutti”, senza dipendere da un unico carrello di materiale costoso o da una singola postazione.
Da qui nasce (e cresce, edizione dopo edizione) “Creare un kit di robotica educativa a basso costo”: un percorso pratico, laboratoriale, pensato per chi vuole costruire un set di robotica essenziale ma potente, personalizzabile e soprattutto portabile in classe con attività pronte.
L’idea chiave del corso è: non comprare un kit, imparare a costruirlo (e a farlo costruire)
Questo webinar non è una “vetrina di strumenti”: è un percorso operativo che vi guiderà a:
- progettare un robot didattico partendo da zero, con componenti accessibili;
- impostare un percorso di base su programmazione e robotica, con una metodologia laboratoriale;
- creare materiali e consegne che puoi riutilizzare ogni anno, adattandole ai tuoi studenti.
Cosa cambia in questa 6ª edizione: più tempo, più attività “effetto laboratorio”
La novità più importante è che questa edizione è stata estesa a 4 lezioni (prima erano 3). Questo tempo in più non è “teoria aggiunta”: è spazio reale per attività che, nella didattica quotidiana, fanno la differenza perché diventano UDA, compiti autentici, mini-progetti e sfide.
In particolare, nella parte avanzata lavoreremo su:
- controllo del robot con gesture recognition: addestriamo un semplice sistema di Machine Learning che riconosce i gesti dell’utente via webcam, e li trasformiamo in comandi;
- progettazione e set-up di mini robot Sumo (con focus su regole, arena, test e iterazione);
- realizzazione di semplici bracci robot (meccanica essenziale + servocomandi + compiti di pick&place).
- … e molto altro
Robot “stampati” o “di cartone”: il corso resta accessibile anche senza stampante 3D
La struttura dei robot sarà basata su modelli:
- stampabili in 3D, per chi dispone di stampante;
- replicabili in cartone (con progetti e sagome), per chi preferisce una soluzione a costo ancora più basso o vuole lavorare in modalità maker “low-tech”.
Questa scelta non è un ripiego: è una strategia didattica. La stessa attività può vivere su materiali diversi, mantenendo invariati gli obiettivi di coding, problem solving e progettazione.
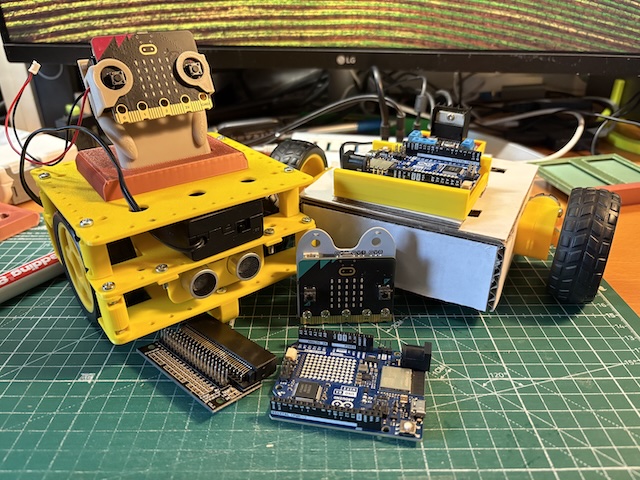
Piattaforme: BBC micro:bit (al centro) e Arduino (per estensioni e ponti)
Il corso nasce con BBC micro:bit come piattaforma centrale (perfetta per avviare coding e robotica anche con studenti al primo approccio). Useremo MakeCode / Blocks per costruire da subito comportamenti significativi e testabili.
Per alcune estensioni e per chi desidera spingersi oltre, porteremo anche esempi e varianti con Arduino, mantenendo però la stessa logica: progetti essenziali, replicabili, sostenibili.
Per micro:bit lavoreremo in particolare con:
- Ring:bit V2
- Kitronik :MOVE mini
Struttura del percorso: dalle basi alla costruzione completa
Il corso è progettato per accompagnarvi con progressione chiara (e riusabile in classe):
- micro:bit + programmazione a blocchi: basi operative e programmi tipici per gestire un robot (movimento, comandi, logiche).
- Tinkercad per la progettazione 3D: modellazione essenziale per creare/riadattare la struttura del robot, con esportazione dei file per stampa 3D o taglio.
- assemblaggio: componenti fondamentali (breadboard, motori, sensori, LED) e integrazione HW/SW fino a ottenere un robot funzionante.
- lezione extra (novità): ML con webcam per controllo a gesti + Sumo + braccio robot, con indicazioni pratiche su come trasformare tutto in attività valutabili.
Calendario e modalità: 4 webinar live (2 ore ciascuno) + registrazioni
4 incontri in diretta, 2 ore ciascuno, per un totale di 8 ore:
- Venerdì 16 gennaio 2026 (17:00–19:00)
- Martedì 20 gennaio 2026 (17:00–19:00)
- Martedì 27 gennaio 2026 (17:00–19:00)
- Martedì 3 febbraio 2026 (17:00–19:00)
Il corso è in modalità webinar con docente dal vivo e possibilità di interazione via chat. Inoltre, potrete rivedere le registrazioni senza limiti di tempo e scaricare i materiali dalla piattaforma.
Materiali inclusi: quello che ti serve per replicare in autonomia
Durante il percorso verranno forniti:
- schede didattiche di approfondimento;
- file/sorgenti per stampa 3D o taglio delle strutture;
- codici di programmazione;
- attività di laboratorio da svolgere con gli studenti.
Il corso è pensato per docenti della primaria (classe quinta) e della secondaria di I e II grado.
È adatto sia a chi parte da zero, sia a chi vuole finalmente mettere ordine e trasformare esperimenti sporadici in un percorso continuativo.
Iscrizione
Se volete iniziare l’anno con un percorso concreto, che vi lascia un kit replicabile e attività spendibili da subito, trovate tutte le informazioni e l’iscrizione nella pagina ufficiale del corso seguendo il link.
N.B. Pubblicherò ulteriori post dove fornirò suggerimenti operativi che vi saranno utili per realizzare con me tutte le attività programmate.
Buon Making a tutti 🙂