Poiché ad uno studente bisognerebbe sempre dare una risposta dedicherò alcuni post per rispondere a quesiti di carattere tecnico, sulluso di Arduino e di Raspberry Pi a cui non ho potuto dare esito durante levento che si è svolto allIIS Cassata Gattaponi di Gubbio: C’era una volta un pezzo di legno.
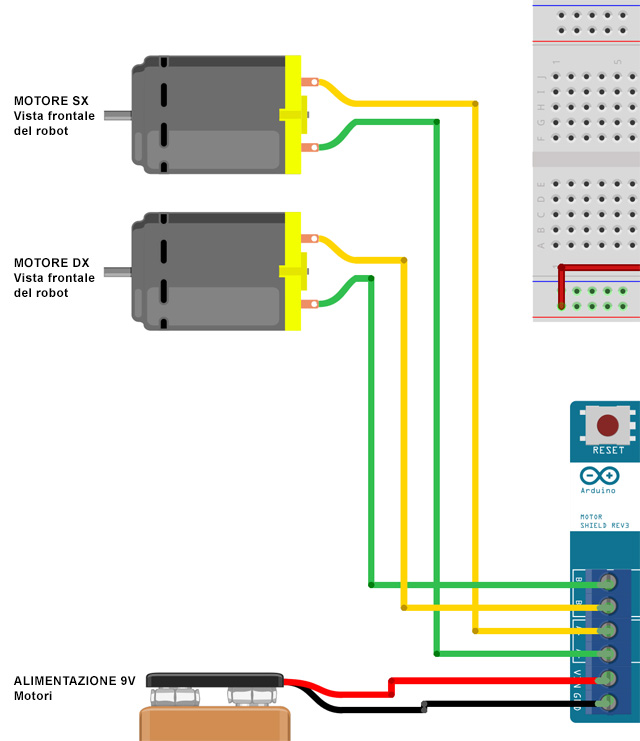
Durante la lezione abbiamo visto come effettuare una prima configurazione del Raspberry Pi 3 e come utilizzarlo insieme ad Arduino per programmare DotBot. Lintera presentazione è stata effettuata utilizzando un Raspberry Pi 3 collegato ad un proiettore su cui ho mostrato slide ed esempi e modalità di installazione e configurazione di sistema.
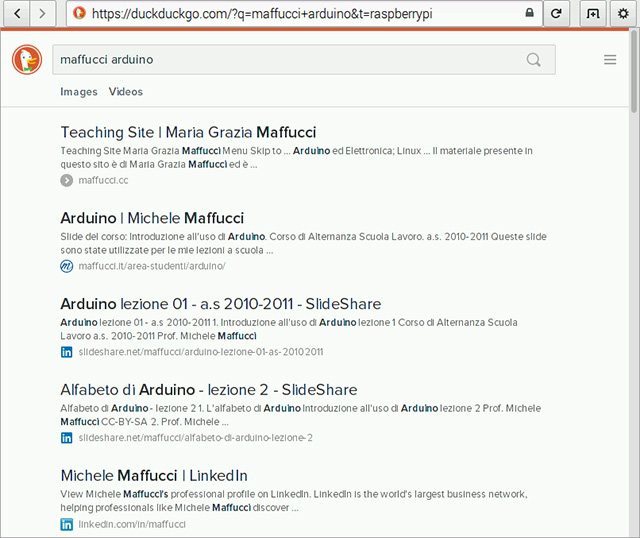
Durante luso a lezione alcuni hanno notato che effettuavo ricerche su internet usando Google direttamente inserendo le query di ricerca allinterno del campo dedicato allinserimento dellURL, funzionalità che non è di default abilitata quando usate Epiphany (browser web che viene installato con Raspbian) che reindirizza invece su DuckDuckGo.
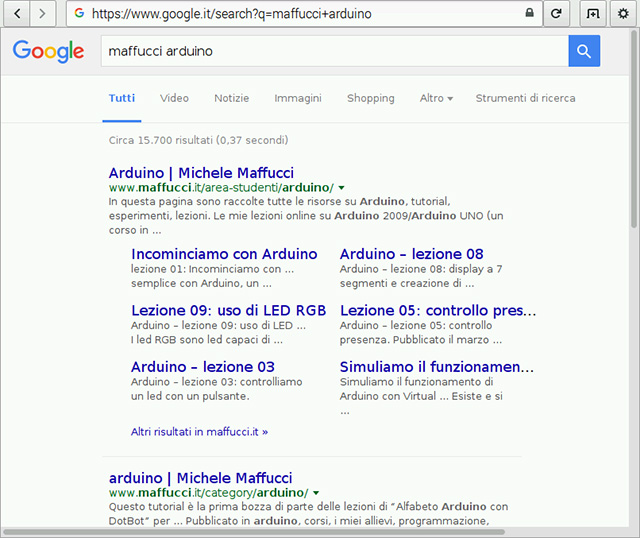
L’obiettivo che si vuole raggiungere è quello indicato nelle due immagini che seguono:
Vediamo come effettuare la modifica del motore di ricerca.
Prima di procedere è essenziale modificare il file: org.gnome.epiphany.gschema.xml utilizzando un qualsiasi editor di testo, io preferisco usare a terminale nano:
sudo nano /usr/share/glib-2.0/schemas/org.gnome.epiphany.gschema.xml

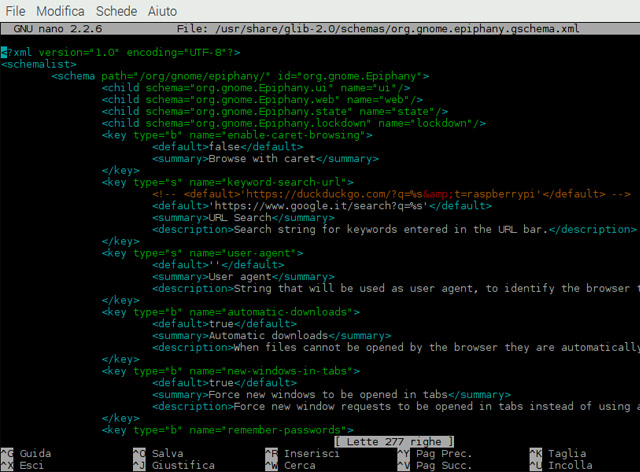
Allinterno del file XML aperto individuate la parte di codice:
'https://duckduckgo.com/?q=%s&t=raspberrypi' URL Search Search string for keywords entered in the URL bar.
Dovrete sostituire la linea:
'https://duckduckgo.com/?q=%s&t=raspberrypi'
con lURL che fa riferimento a Google:
'https://www.google.it/search?q=%s'
ovviamente se desiderate potrete impostare qualsiasi motore di ricerca diverso da Google, dovrete ovviamente trovare la giusta URL e stringa di query.
Nella sezione che segue io ho preferito rendere commento la linea di codice originale per mantenere lo storico delle modifiche effettuate, il tutto diventerà:
'https://www.google.it/search?q=%s' URL Search Search string for keywords entered in the URL bar.
E importante che voi inseriate correttamente lURL con la parte finale “/search?q=%s che serve appunto per effettuare la ricerca del testo inserito, se non inserite questa ultima parte verrete semplicemente reindirizzati sulla home page di Google.
Dovrete ora eseguire tre passi per concludere tutta la fase di configurazione, a terminale digitate:
sudo apt-get install libglib2.0-bin
e successivamente:
sudo glib-compile-schemas /usr/share/glib-2.0/schemas
Riavviate Epiphany.
Buona sperimentazione a tutti 😃