Alcuni lettori hanno notato nella lezione in cui ho condiviso i sorgenti per la stampa 3D del robot, che la scheda motori utilizzata è una Adafruit Motor Shield V01 e mi è stato fatto notare che esiste la V02 della scheda, quindi perché ho usato la versione precedente? La risposta non è tecnica ma economica, ho acquistato ad un prezzo interessante, su uno store cinese, una grande quantità di queste schede che poi ho usato per i miei corsi. Ovviamente nulla vieta che voi possiate utilizzare una qualsiasi altra scheda, la logica di programmazione è la medesima, ma certamente varieranno il nome delle istruzioni che controllano il motore, se avete necessità contattatemi.
Lista componenti
- N. 1 Arduino UNO R3
- N. 1 Adafruit Motor Shield V01
- Modulo Bluetooth HC05
- N. 4 Motori DC 6V
- N. 4 Ruote
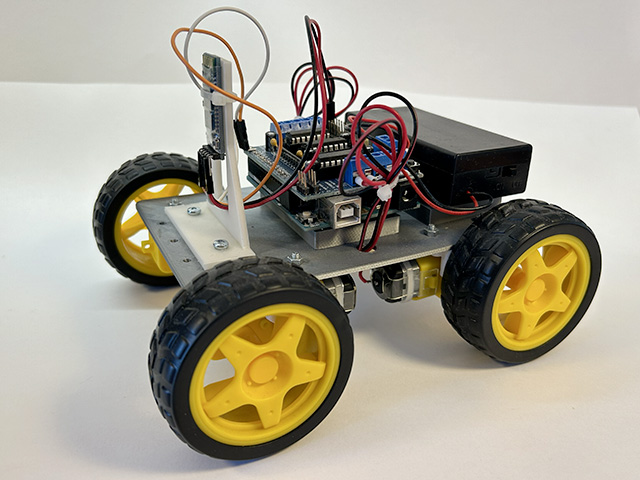
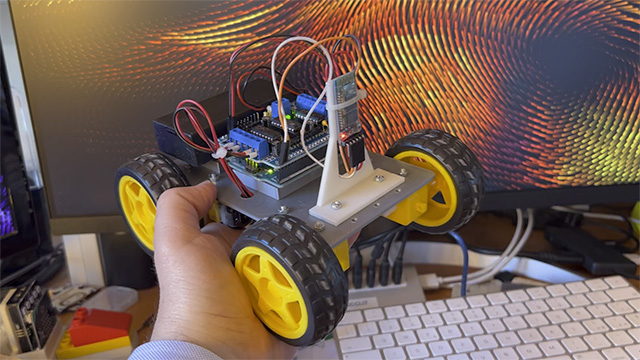
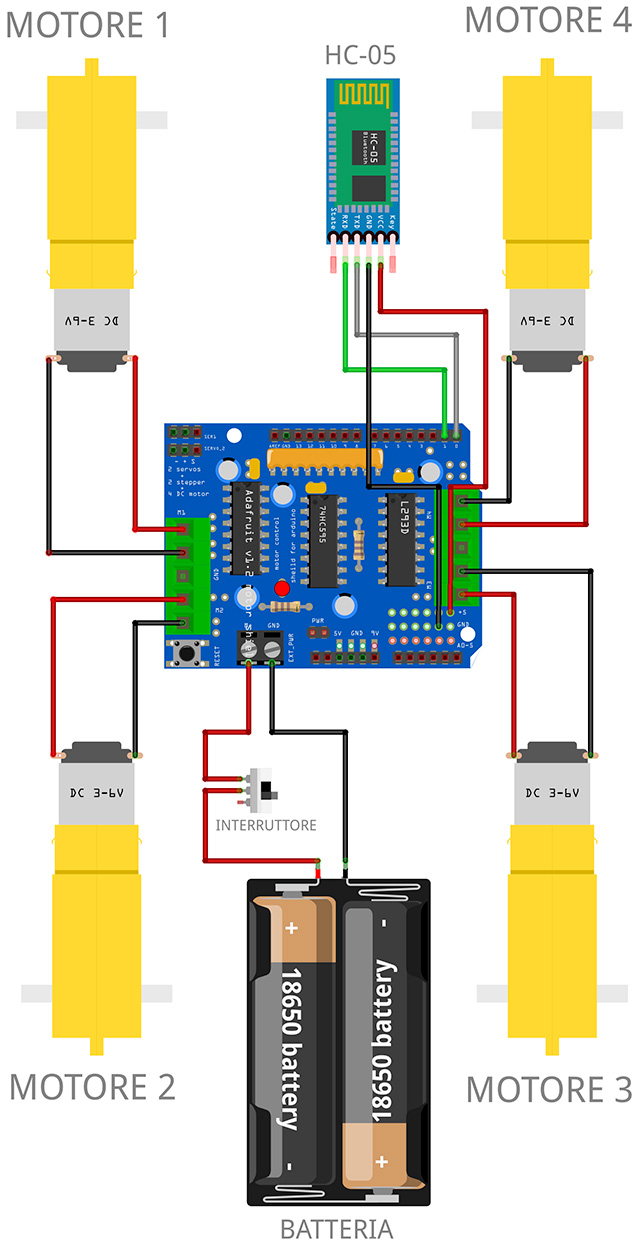
Di seguito trovate i collegamenti elettrici effettuati e il primo sketch di esempio con cui parto per svolgere le successive esercitazioni. Per gli allievi e i docenti che si iscriveranno ai miei corsi darò ulteriori esempi e spiegazioni.
Lo shield per il controllo motori può gestire fino a 4 motori DC in entrambe le direzioni, ciò vuol dire che possono essere azionati sia in avanti che all’indietro. La velocità può anche essere variata con incrementi dello 0,5% utilizzando PWM integrato sulla scheda, ciò permetterà un movimento uniforme e non brusca del robot.
Il ponte H presente sulla scheda può pilotare carichi NON superiori ai 0,6A o che hanno picchi di richiesta corrente NON superiori a 1,2A, quindi utilizzate questa scheda per piccoli motori, i classici motori gialli da 6V vanno più che bene.
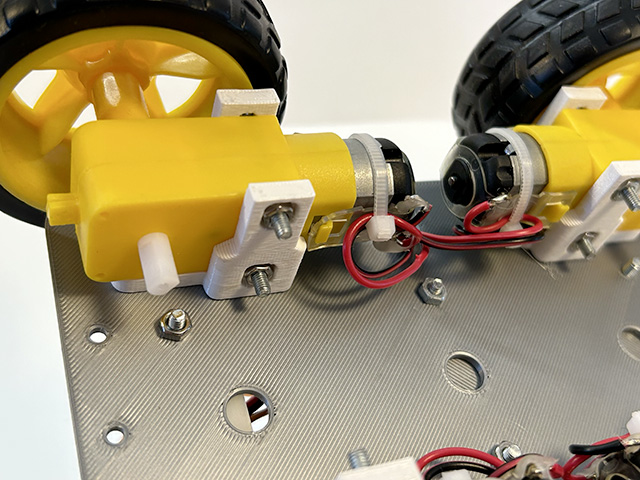
Collegamento motori allo shield Arduino Motor Driver
Come indicato nell’immagine che segue è molto semplice:
– saldate due cavi al motorino (in commercio trovate motori con fili saldati)
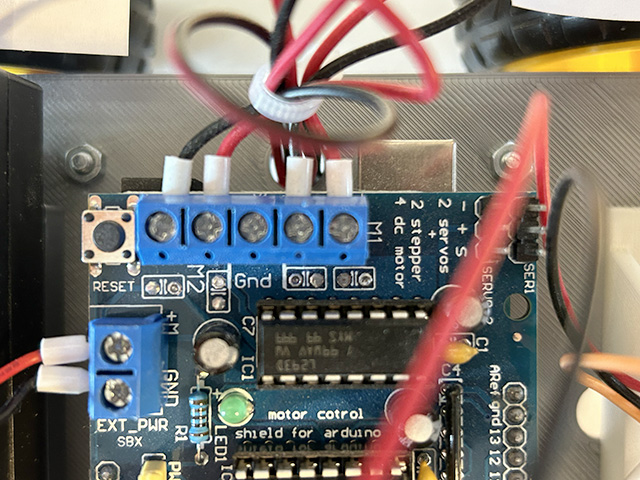
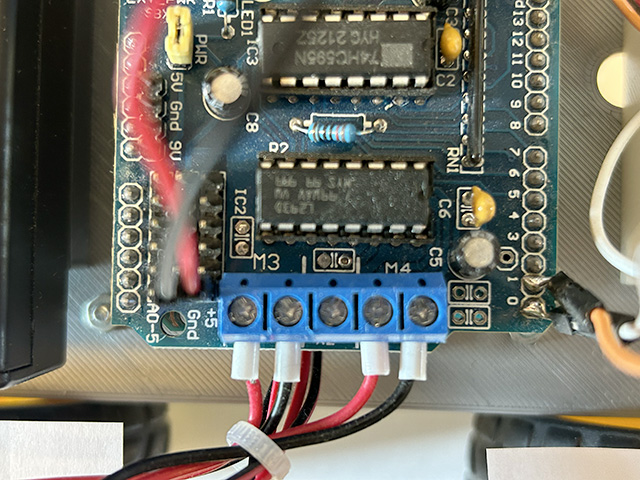
– collegate i motori ai morsetti: M1, M2, M3 o M4.
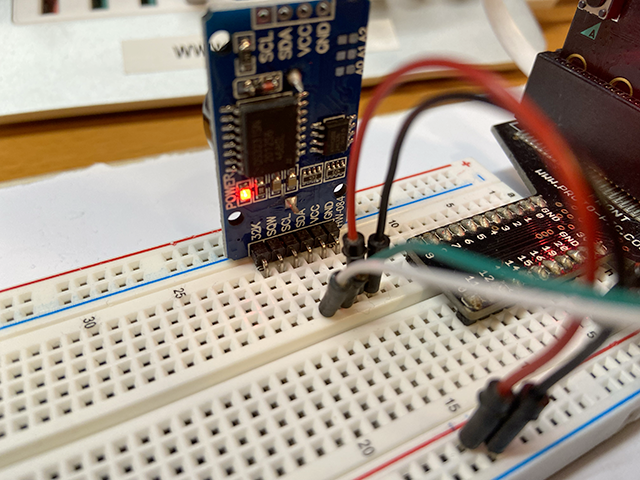
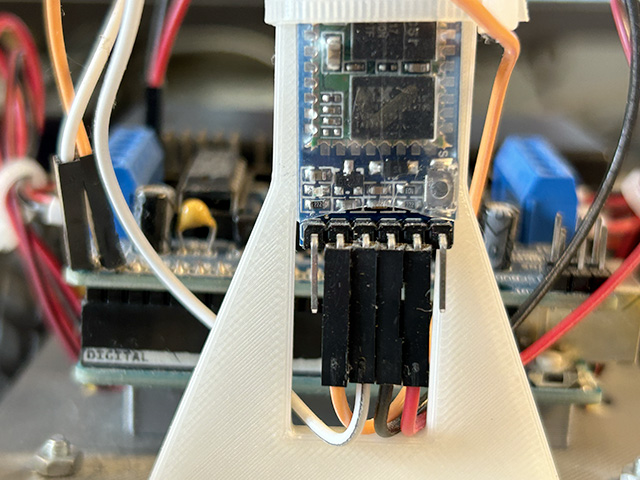
Collegamento scheda Bluetooth HC-05 allo shield Arduino Motor Driver
Come sicuramente saprete, il modulo Bluetooth HC-05 permette di convertire una porta seriale UART in una porta Bluetooth e la utilizzeremo per inviare su seriale i caratteri selezionati da una specifica app Android, per comandare direzione e velocità dei motori del robot.
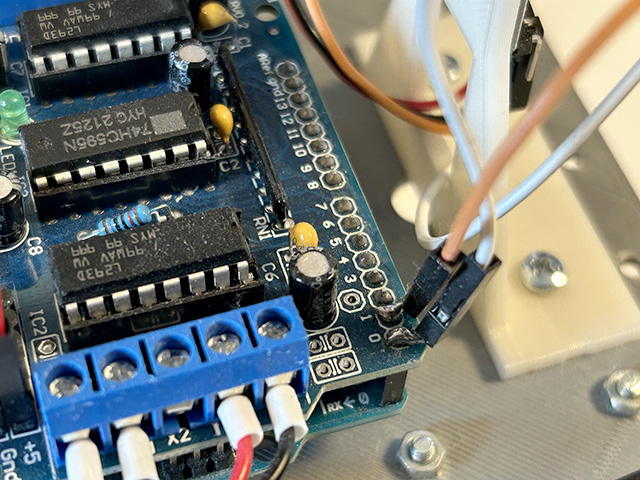
I collegamenti sono:
HC05 <-> Arduino Motor Driver
RX - Pin 1
TX - Pin 0
G - GND
V - +5V
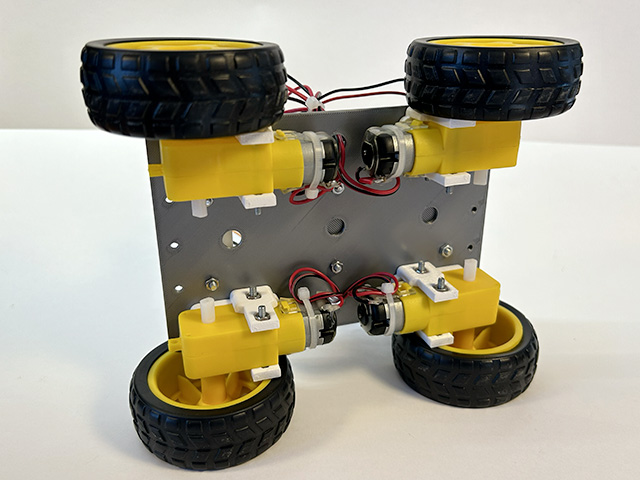
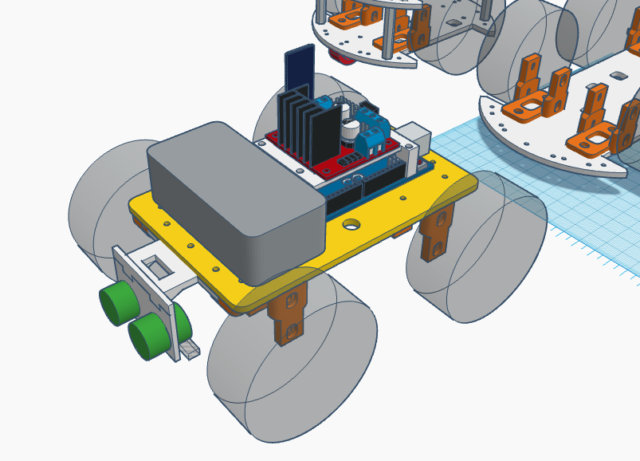
Orientamento ruote.
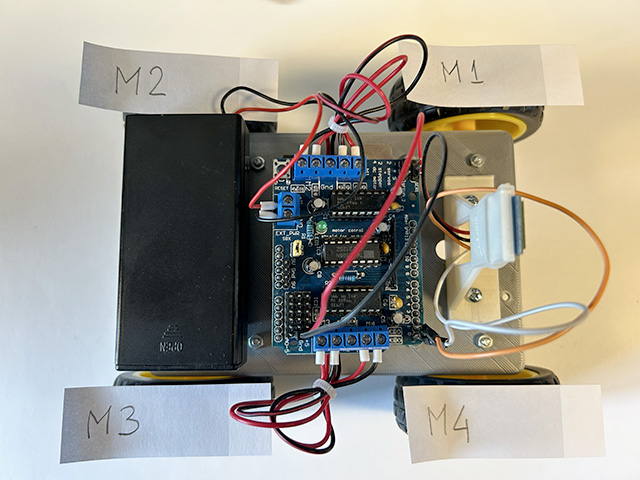
Collegamento motori M1 e M2.
Collegamento motori M3 e M4.
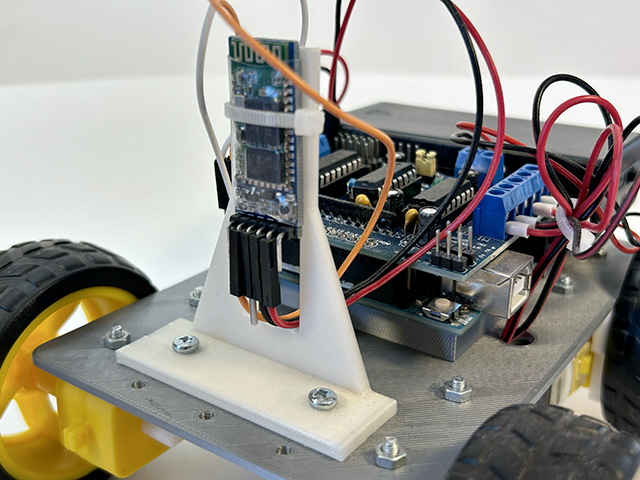
Modulo Bluetooth HC-05.
Connessione dei pin RX e TX del modulo Bluetooth HC-05 alla seriale di Arduino (pin 0 e pin 1).
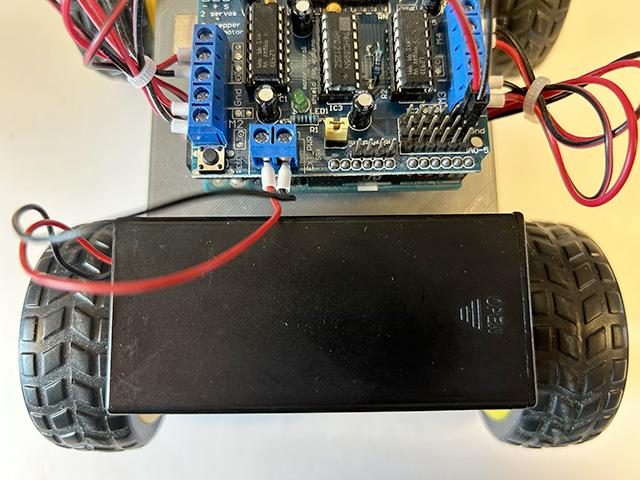
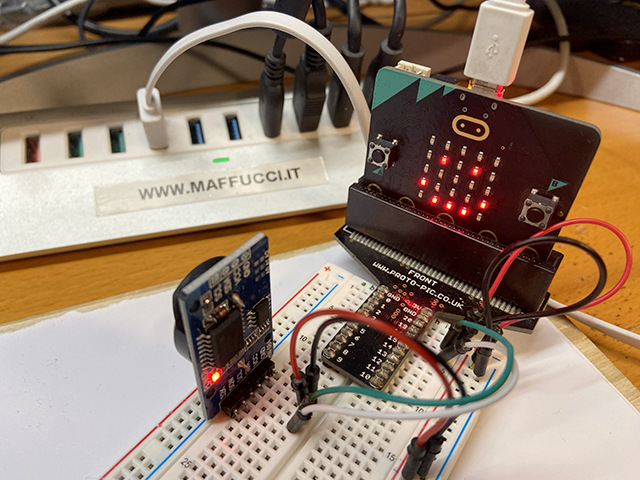
Alimentazione del modulo Bluetooth HC-05 attraverso lo shield.
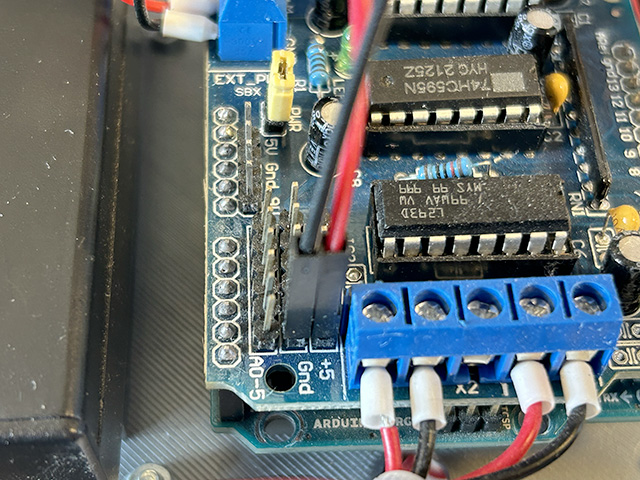
Alimentazione dello shield.