
Accelerometro
L’accelerometro del Sensor Kit è un “sensore di movimento” a tre assi (X, Y, Z) capace di misurare come cambia la velocità di un oggetto nello spazio. Anche quando è fermo, l’accelerometro non rileva “zero accelerazione” in quanto misura la gravità terrestre, circa 1 g (≈ 9,81 m/s²). Questa caratteristica è utilissima perché ci permette sia di capire se e quanto ci stiamo muovendo, sia di stimare l’inclinazione del modulo rispetto alla verticale. In pratica: se appoggio la scheda piatta sul banco, il valore lungo Z sarà vicino a 1 g; se lo incliniamo, la gravità si “ridistribuisce” tra X e Y e possiamo ricavare l’angolo di inclinazione.
Con i dati che fornisce l’accelerometro possiamo fare molte cose: visualizzare scosse e vibrazioni (come un mini sismografo), creare un avviso di caduta, progettare giochi di equilibrio o semplicemente tracciare i movimenti sulla Serial Plotter. In questa lezione impareremo a leggere le tre componenti, a filtrare il rumore e a trasformare quei numeri in azioni concrete (LED, buzzer, messaggi su OLED).
Un briciolo di teoria
L’accelerometro misura accelerazioni lungo X, Y, Z e come dicevo sopra, da fermo “vede” la gravità (~1 g ≈ 9,81 m/s²).
Il modulo del vettore accelerazione è:
![]()
Con il dispositivo quasi fermo, possiamo stimare l’inclinazione rispetto alla verticale usando solo la gravità:
![]()
che rappresenta l’angolo rispetto all’asse Z (in gradi).
Caratteristiche tecniche (per i più esperti)
- Tipo sensore: MEMS accelerometro triassiale digitale.
- Interfacce: I²C e SPI digitali (il modulo Grove è normalmente usato in I²C sul Sensor Kit).
- Indirizzo I²C: di default 0x19, commutabile a 0x18 (pin SA0/SDO a GND).
- Campo di misura (full-scale): ±2 g, ±4 g, ±8 g, ±16 g (selezionabile via registro).
- Risoluzione dati: uscita fino a 16-bit; modalità operative low-power/normal/high-resolution (fino a 12-bit effettivi).
- Frequenza di campionamento (ODR): da 1 Hz fino a 5.3 kHz (a seconda della modalità).
- Funzioni integrate:
- 2 generatori di interrupt programmabili (motion, free-fall, wake-up).
- Rilevamento orientamento 6D/4D, self-test, FIFO 32 campioni.
- Alimentazione (chip): 1.71–3.6 V; consumo molto basso (fino a ~2 µA in ultra-low-power). Il modulo Grove è compatibile 3 V / 5 V.
- Intervallo di temperatura operativa: −40 °C … +85 °C.
Informazioni utili per l’uso nell’Arduino Sensor Kit
- Con la libreria
Arduino_SensorKit.hleggete le tre componenti conAccelerometer.readX() / readY() / readZ(); i valori restituiti sono interpretati in g (gravità ≈ 1 g a riposo). - Il modulo Grove usato nel Sensor Kit documenta esplicitamente indirizzi I²C, range e compatibilità 3V/5V, utile se sorgono conflitti su bus I²C o serve cambiare indirizzo.
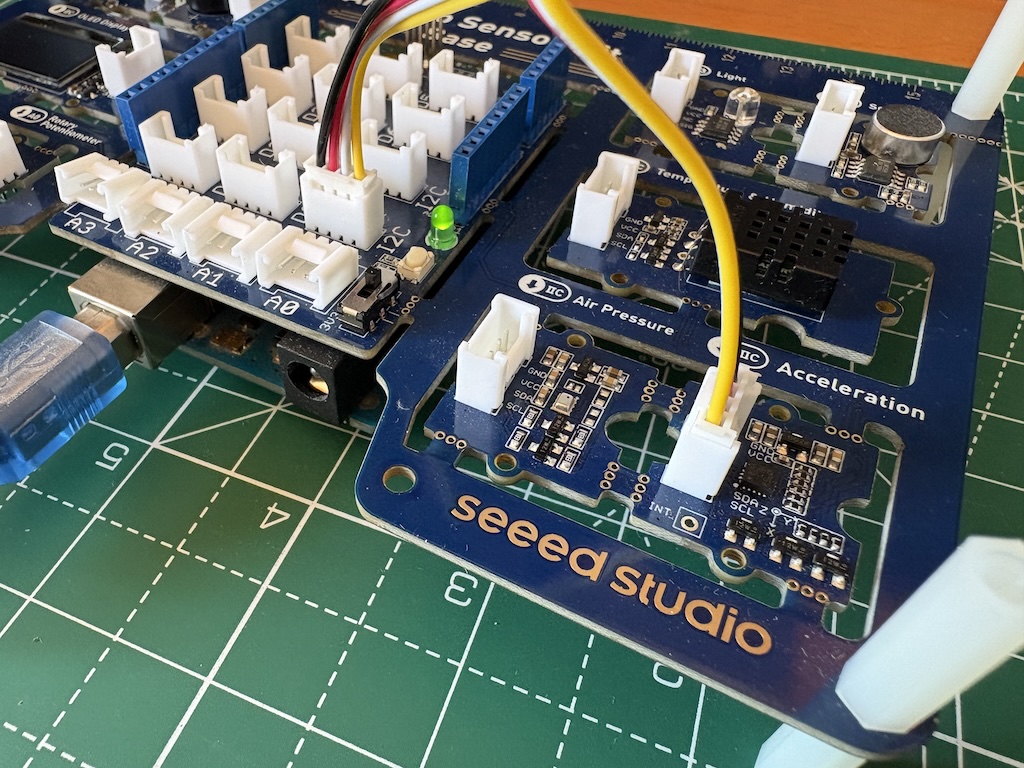
Collegamenti
Per quanto riguarda i collegamenti è sufficiente connettere il sensore ad uno degli ingressi I²C della Base Shield.
Esempio 01 – Lettura accelerometro 3 assi
/*
Prof. Maffucci Michele
02.10.2025
Lettura accelerometro 3 assi – Arduino Sensor Kit
*/
#include <Arduino_SensorKit.h> // Libreria unica per i moduli del Sensor Kit
const unsigned long intervalloMs = 500; // intervallo tra una stampa e la successiva
void setup() {
// Inizializzazione porta seriale per inviare i dati al PC
Serial.begin(9600);
// ATTENZIONE:
// while(!Serial); serve ad ASPETTARE che il monitor seriale sia stato aperto
// (utile sulle schede con USB nativa, esempio: Arduino UNO R4 WiFi, Leonardo, MKR).
// Così non "perdi" le prime stampe.
// Su schede senza USB nativa non è necessario e puoi rimuoverlo.
while (!Serial) { ; }
// Avvio dell'accelerometro a 3 assi
Accelerometer.begin();
}
void loop() {
// Lettura delle tre componenti di accelerazione (in g)
float accelX = Accelerometer.readX(); // Asse X
float accelY = Accelerometer.readY(); // Asse Y
float accelZ = Accelerometer.readZ(); // Asse Z
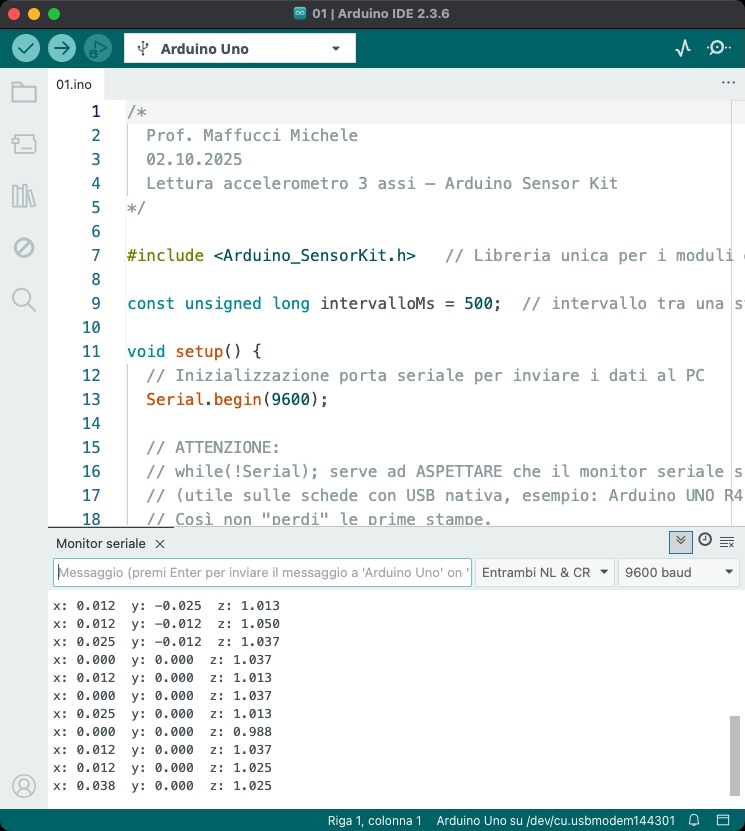
// Stampa in formato semplice: x:.. y:.. z:..
Serial.print("x: ");
Serial.print(accelX, 3); // 3 decimali per leggibilità
Serial.print(" ");
Serial.print("y: ");
Serial.print(accelY, 3);
Serial.print(" ");
Serial.print("z: ");
Serial.println(accelZ, 3);
delay(intervalloMs);
}
Esempio 02: Accelerometro – Stampa su Serial Monitor e display OLED
Visualizzazione delle componenti x, y e z dell’accelerazione su Serial Monitor e display OLED
/*
Prof. Maffucci Michele
02.10.2025
Lettura accelerometro 3 assi – Arduino Sensor Kit
Stampa su Serial Monitor e display Oled
*/
#include <Arduino_SensorKit.h> // Libreria unica per i moduli del Sensor Kit
const unsigned long intervalloMs = 500; // intervallo tra una stampa e la successiva
void setup() {
// Inizializzazione porta seriale per inviare i dati al PC
Serial.begin(9600);
// ATTENZIONE:
// while(!Serial); serve ad ASPETTARE che il monitor seriale sia stato aperto
// (utile sulle schede con USB nativa, esempio: Arduino UNO R4 WiFi, Leonardo, MKR).
// Così non "perdi" le prime stampe.
// Su schede senza USB nativa non è necessario e puoi rimuoverlo.
while (!Serial) { ; }
// Avvio dell'accelerometro a 3 assi
Accelerometer.begin();
Oled.begin();
// Inizializza il display OLED.
// Fa partire la comunicazione I2C e manda al display la sequenza di avvio.
// Senza questa riga lo schermo non mostra nulla.
Oled.setFlipMode(true);
// Ruota il contenuto di 180° (utile se lo vedi capovolto).
// Se nel tuo caso appare già dritto, puoi mettere false: Oled.setFlipMode(false);
Oled.setFont(u8x8_font_chroma48medium8_r);
// Sceglie il font (carattere) 8x8.
// Con un font 8x8 il display 128x64 si comporta come una griglia 16 colonne × 8 righe.
// Significa che setCursor(colonna, riga) userà numeri tra 0..15 (colonne) e 0..7 (righe).
Oled.clear();
// Pulisce lo schermo (cancella tutto quello che c’era prima).
}
void loop() {
// Lettura delle tre componenti di accelerazione (in g)
float accelX = Accelerometer.readX(); // Asse X
float accelY = Accelerometer.readY(); // Asse Y
float accelZ = Accelerometer.readZ(); // Asse Z
// Stampa in formato semplice: x:.. y:.. z:..
Serial.print("x: "); // stampa la stringa x: su Serial Monitor
Serial.print(accelX, 3); // 3 decimali per leggibilità
Serial.print(" ");
Serial.print("y: "); // stampa la stringa y: su Serial Monitor
Serial.print(accelY, 3); // 3 decimali per leggibilità
Serial.print(" ");
Serial.print("z: "); // stampa la stringa z: su Serial Monitor
Serial.println(accelZ, 3); // 3 decimali per leggibilità
Oled.setCursor(0, 0); // colonna 0, riga 0
Oled.println("ACCELERAZIONE"); // stampa la stringa e va a capo
Oled.setCursor(0, 2); // colonna 0, riga 2
Oled.print("x: "); // stampa la stringa x:
Oled.print(accelX, 3); // stampa la componente x dell'accelerazione con 3 cifre decimali
Oled.setCursor(0, 3); // colonna 0, riga 3
Oled.print("y: "); // stampa la stringa y:
Oled.print(accelY, 3); // stampa la componente y dell'accelerazione con 3 cifre decimali
Oled.refreshDisplay();
Oled.setCursor(0, 4); // colonna 0, riga 4
Oled.print("z: "); // stampa la stringa z:
Oled.print(accelZ, 3); // stampa la componente z dell'accelerazione con 3 cifre decimali
Oled.refreshDisplay();
delay(intervalloMs);
}
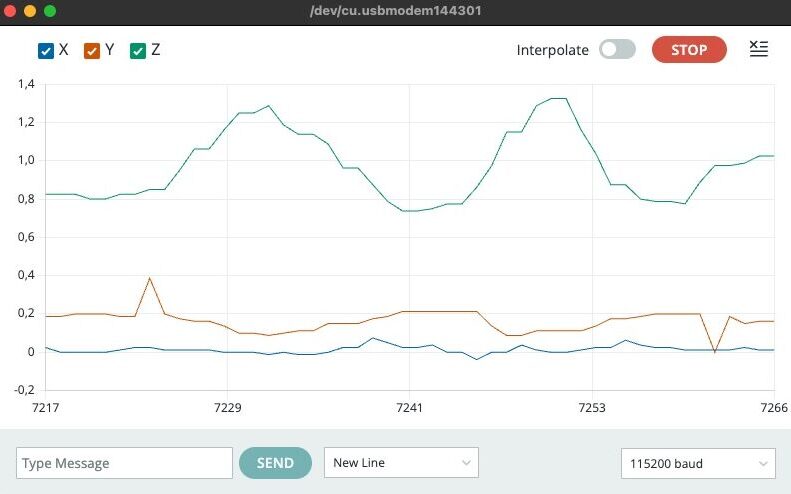
Esempio 03: Accelerometro – Uscita per Serial Plotter (3 curve: X, Y, Z)
Stampa i tre assi con etichette e tab in un’unica riga per campione, in questo modo l’IDE mostra tre curve (X, Y, Z).
/*
Prof. Maffucci Michele
02.10.2025
Accelerometro – Uscita per Serial Plotter (3 curve: X, Y, Z)
Nota: una riga = un campione; valori etichettati e separati da TAB -> 3 curve nel Plotter.
*/
#include <Arduino_SensorKit.h>
const unsigned long periodoCampionamentoMs = 10; // circa 100 Hz (riduci/aumenta a piacere)
void setup() {
Serial.begin(115200);
// Attende l'apertura del Monitor/Plotter Seriali sulle schede con USB nativa
while (!Serial) { ; }
Accelerometer.begin();
// Messaggio di avvio (facoltativo)
Serial.println("Traccio X,Y,Z (g) - dati GREZZI (nessun filtro)");
}
void loop() {
// Letture grezze in g
float x = Accelerometer.readX();
float y = Accelerometer.readY();
float z = Accelerometer.readZ();
// Stampa “label:valore” separati da TAB → il Plotter disegna tre curve
Serial.print("X:");
Serial.print(x, 3);
Serial.print('\t');
Serial.print("Y:");
Serial.print(y, 3);
Serial.print('\t');
Serial.print("Z:");
Serial.println(z, 3);
delay(periodoCampionamentoMs);
}
Versione per esperti

Esempio 04: Accelerometro – Uscita per Serial Plotter (3 curve: X, Y, Z) con filtro passa-basso
Come avete potuto notare nella versione precedente le curve delle tre componenti dell’accelerazione erano seghettate e venivano rappresentate anche piccoli tremolii.
Per evitare questo problema useremo nello sketch che segue un filtro IIR (passa-basso) che smusserà il rumore.
Quali sono i vantaggi nell’utilizzo di un filtro passa basso:
- Rumore: piccole variazioni veloci e indesiderate nei dati (tremolio della mano, vibrazioni del banco, disturbi elettrici).
- Passa-basso: un filtro che lascia passare i cambiamenti lenti (il “trend” reale del movimento) e attenua i cambiamenti veloci (dovuti al rumore).
- IIR (Infinite Impulse Response): significa che l’uscita del filtro dipende sia dal valore attuale sia dall’uscita precedente. In pratica: il filtro “ricorda” un po’ del passato -> è una media mobile esponenziale.
Formule per ogni asse:
uscita_filtrata(t) = α * ingresso(t) + (1−α) * uscita_filtrata(t−1)
α è un numero tra 0 e 1:
- α piccolo (es. 0.1) > molto liscio (tanto filtraggio) ma più lento a seguire i cambiamenti.
- α grande (es. 0.6) > meno liscio (meno filtraggio) ma più reattivo.
In sintesi:
scegliere α in base al compromesso “più liscio vs più rapido”.
/*
Prof. Maffucci Michele
02.10.2025
Accelerometro - Uscita per Serial Plotter (3 curve: X, Y, Z) con filtro IIS (passa-basso)
Note:
- Il Serial Plotter IDE riconosce coppie "etichetta:valore" sulla stessa riga,
separate da TAB. Ogni riga = un campione nel tempo.
*/
#include <Arduino_SensorKit.h>
const unsigned long periodoCampionamentoMs = 10; // circa 100 Hz
const bool usaFiltro = true; // metti false se vuoi i dati grezzi
const float alfa = 0.2; // 0..1 (più piccolo = più filtrato)
float xF = 0, yF = 0, zF = 0; // stati del filtro
void setup() {
Serial.begin(115200);
// Serve ad attendere l'apertura del Monitor/Plotter Seriali sulle schede con USB nativa,
// così non perdete le prime stampe (su UNO "classico" puoi toglierlo senza problemi).
while (!Serial) { ; }
Accelerometer.begin();
// (Facoltativo) riga di "header" informale: non necessaria, ma utile a chi guarda il log
Serial.println("Pronto: traccio X,Y,Z (g) su Serial Plotter");
}
void loop() {
// Letture in g
float x = Accelerometer.readX();
float y = Accelerometer.readY();
float z = Accelerometer.readZ();
if (usaFiltro) {
// Filtro IIR (passa-basso) molto semplice per smussare il rumore
xF = alfa * x + (1.0f - alfa) * xF;
yF = alfa * y + (1.0f - alfa) * yF;
zF = alfa * z + (1.0f - alfa) * zF;
// Stampa "label:valore" separati da TAB > tre curve nel Plotter
Serial.print("X:");
Serial.print(xF, 3);
Serial.print('\t');
Serial.print("Y:");
Serial.print(yF, 3);
Serial.print('\t');
Serial.print("Z:");
Serial.println(zF, 3);
} else {
Serial.print("X:");
Serial.print(x, 3);
Serial.print('\t');
Serial.print("Y:");
Serial.print(y, 3);
Serial.print('\t');
Serial.print("Z:");
Serial.println(z, 3);
}
delay(periodoCampionamentoMs);
}
Analizziamo nel dettaglio la parte del filtro.
xF = alfa * x + (1.0f - alfa) * xF; yF = alfa * y + (1.0f - alfa) * yF; zF = alfa * z + (1.0f - alfa) * zF;
xF = alfa * x + (1.0f - alfa) * xF;
xè il dato grezzo appena letto dall’accelerometro sull’asse X.xFè il dato filtrato (uscita del filtro) per l’asse X.alfa * xprende una frazione del dato nuovo (quanto “peso” dai alla misura attuale).(1.0f - alfa) * xFprende una frazione del valore filtrato precedente (la “memoria”).- La somma dei due termini fornisce un valore ammorbidito: meno sensibile ai picchi improvvisi.
Nota sul suffisso f: indica un float letterale (utile per evitare promozioni a double in alcune piattaforme).
yF = alfa * y + (1.0f - alfa) * yF;
- Identico ragionamento, ma applicato all’asse Y: nuova misura
y+ memoria del filtratoyF. - Mantieni
alfauguale sugli assi per coerenza visiva nel Plotter.
zF = alfa * z + (1.0f - alfa) * zF;
- Stessa cosa per l’asse Z: la componente verticale (spesso contiene circa 1 g).
- Filtrare Z aiuta a vedere meglio oscillazioni lente e a ridurre tremolii.
Qualche nota pratica
- Inizializzazione: se impostate
xF = yF = zF = 0all’inizio, i primi campioni possono “salire” gradualmente verso il valore reale (breve transitorio). Se volete partire subito “allineati”, potete inizializzarexF=yF=zFal primo dato letto. - Scelta di
alfa:
0.1-0.3 > grafico molto liscio (meno rumore), risposta più lenta.
0.4-0.7 > più reattivo, ma un po’ più “seghettato”.
Buon Coding a tutti 🙂

































