La frase di rito: “mi dispiace per il tuo incidente, devi avere tanta pazienza”
come se la pazienza fosse un medicinale che basta ingerire per far passare ogni “incaz..” arrabbiatura 🙂
Certamente come insegnante esercitarsi nell’arte della pazienza, se condita con qualche pratica di meditazione impartita dalla moglie “jogica”, può servire in questa mia situazione di disabilità temporanea e credo che certamente migliorerà il rapporto e la gestione delle classi che rivedrò a settembre… quindi è il caso di dire che si è sempre in modalità “formazione continua” 🙂
Come insegnante che vive perennemente in laboratorio non mi stancherò mai di dire che qualsiasi insegnamento per essere ben appreso deve passare per un’azione pratica, nel senso fisico del termine… le solite cose che dico da sempre, però non avevo mai riflettuto pienamente sul fatto che la disabilità la si comprende meglio vivendola, sì ritengo che per insegnare le materie “cittadinanza”, “convivenza civile” e tutte quelle cose che potrebbero tradursi in: “rispetta il prossimo” dovrebbero passare anche per laboratori pratici di “disabilità simulata”:
Ragazzi oggi vediamo per un’intera mattinata cosa vuol dire:
non avere una gamba
non avere un braccio
non vedere
…
come lavarsi con una mano sola
ecc…
questo sicuramente farebbe capire ad un altro essere umano che forse concedere il posto sul bus ad una persona diversamente abile, o aprirgli la porta dovrebbe essere un gesto normale… faccio proprio questi esempi perché li ho vissuti di persona.
Ricordo qualche giorno fa quando fui invitato ad una conferenza presso il Salone del Libro di Torino, per chi conosce il luogo, avrà notato che per giungere alla biglietteria bisogna percorrere un grande piazzale, sottoporsi al controllo della polizia e poi proseguire per l’area accrediti, in questo tragitto breve per i normodotati si nota:
1. nessun ingresso riservato ai disabili o che consentisse un accompagnamento all’interno del salone
2. la pavimentazione sembra, per chi ha le stampelle, fatta proprio per cadere
3. ma la cosa buffa e la porta d’ingresso lato operatori scolastici, chiusa, faccio un cenno ad un responsabile alla biglietteria e mi viene risposto con un gesto che stava a significare “spinga!”, in quel momento avrei voluto invitare il simpatico personaggio a visitare “paesi lontani”, ma la poca pazienza rimasta mi ha permesso di non rovinarmi la giornata, fortunatamente un gentile collega ha aperto per me la porta ed ha lanciato un’occhiata di rabbia al responsabile della biglietteria (persona di circa 45 anni)
4. e poi… ingresso strettissimo e spintoni da persone all’ingresso biglietteria.
però grande rispetto da parte dei bambini delle scuole elementari, simpaticissimo uno di loro guardando il mio tutore disse: “uaooo che figata! Ma hai il super-piedone! Ma è vero?”… vorrei averlo io per fare i super salti! …. grande risata 🙂
Tutto ciò non per lamentarsi dell’organizzazione del salone del Libro di Torino, ma per fare un esempio di come i luoghi delle nostre città siano assolutamente disegnati per persone “normodotate”.
… quindi sì laboratori di disabilità simulata, magari condotti da formatori che vivono quotidianamente la disabilità, questa sarebbe una bella azione didattica, magari organizzata da animatori digitali visionari che fanno usare le stampanti 3D anche per rendere oggetti e luoghi “accessibili”.
Ecco che alcuni lettori a questo punto diranno: “Michele è arrabbiato”,
ma in realtà mica tanto, la cosa che mi infastidisce è il gradiente di indifferenza, molto alto, certamente un indicatore di ignoranza, una cartina al tornasole che, in questo momento di vita “slow” mi permette di vedere con occhi diversi persone e luoghi.
Ecco perché sin da subito ho apprezzato, chi con azioni vere, si sta adoperando per ridisegnare i nostri luoghi e fornirci competenze per migliorare la vita di tutti.
E vaiii con i ringraziamenti:
Agli amici ed i colleghi del CTS di Torino con cui collaboro da diversi anni ed insieme si cerca di fare formazione e dare aiuto con sussidi per la disabilità agli studenti della Provincia di Torino.
A tutti i colleghi per la rete sull’Autismo (CTS del Piemonte) che con grande fatica si stanno adoperando nella creazione di sportelli per scuole e famiglie.
Al Laboratorio Nazionale AsTech (Tecnologie Assistive) del CINI (Consorzio Interuniversitario Nazionale per l’Informatica) che ha fatto partire quest’anno la Hackability@PoliTo, in cui gli studenti del primo anno iscritti al corso di “Tecnologie per la Disabilità”, coordinato dal Professor Paolo Prinetto. Azione che ho avuto modo di conoscere grazie agli amici Ludovico Orlando Russo e Giuseppe Airò Farulla.
E poi come non citare “l’illuminato” Enrico Bassi di OpenDot che da sempre è sensibile a tutte le problematiche sulla disabilità e che spesso in passato ha organizzato eventi per sensibilizzare e creare una rete attiva sul tema del supporto alla disabilità.
Non ultimo l’amico gelataio di fiducia, che da ieri ha reso accessibile l’ingresso al suo negozio a me 🙂 (giuro!)
… e poi agli amici colleghi che stanno lavorando con i loro studenti su Hackability
Mentre scrivi questo poche righe sul tuo diario elettronico ti cadono per n-esima volta le stampelle a terra, ti alzi cerchi di farti un caffè e ti cadono le stampelle, vai in bagno per farti la barba e ti cadono le stampelle… sì sono anche io un po’ impedito e forse tutto ciò nasce da un po’ di insofferenza 🙂
L’invito che faccio agli studenti: “hackerate la vostra vita, siano essi pensieri o oggetti, modificatela secondo le vostre necessità non accontentatevi di quanto altri vi propongono”.
Un buon modo che trovo altamente formativo è quello di concedersi un’azione di “hackeraggio” quotidiano, magari scrivendo un tutorial che risolva un problema, basta circa 1 ora di lavoro per semplificarsi la vita.
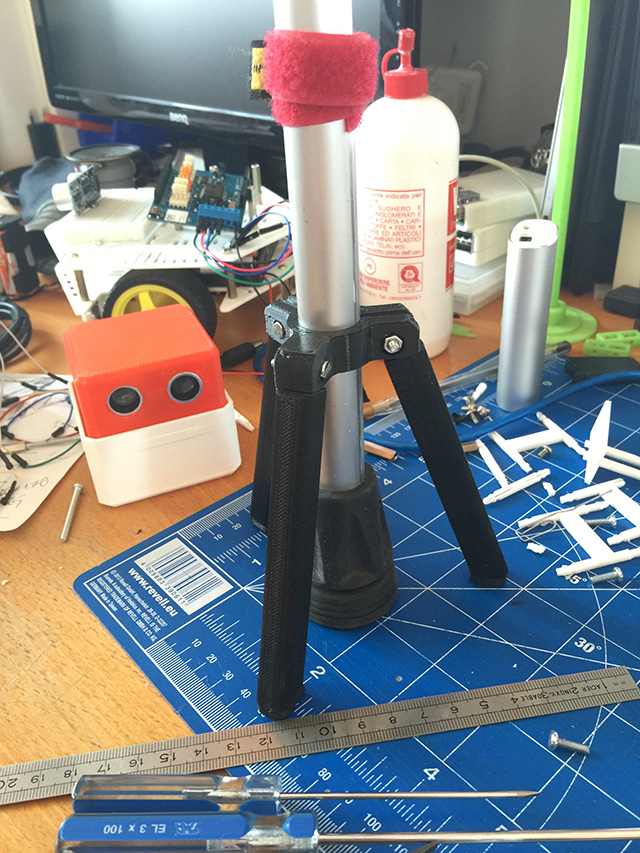
Questa è la mia cura di oggi:
- Andare su Thingiverse
- Cercare con la parola chiave: tripod
- Sezionare un progetto, io ho selezionato: Raspberry Pi Camera Case and Tripod
adattarlo alle vostre esigenze con qualsiasi software di modellazione 3D e poiché molti lettori sono giovanissimi studenti ho fatto queste modifiche con Tinkercad - Condividete a tutti il progetto su Tinkercad
- Depositate il progetto anche su Thingiverse
- Rendete pubblico il progetto su Thingiverse: http://www.thingiverse.com/thing:1587556
- Stampate il tripod per le vostre stampelle
- Montate il tripod
Tempo di ricerca e modifica 1 ora, per la stampa un po’ di più.
Versione 1.0 ulteriori modifiche nei prossimi giorni.
Ma è così difficile costruire un mouse, una tastiera da computer, una posata fatta su misura per l’allievo con necessità specifiche?
Forza studenti! Hackerate e siate felici 🙂
P.S. Pensierino per alcuni…
Certo è che se ci fosse qualche “laboratorio territoriale per l’occupabilità nell’ambito del PNSD” che si concentrasse proprio su questi aspetti sarebbe utilissimo.