Incominciamo questa lezione fornendo la soluzione agli esercizi della lezione precedente.
Esercizio 1
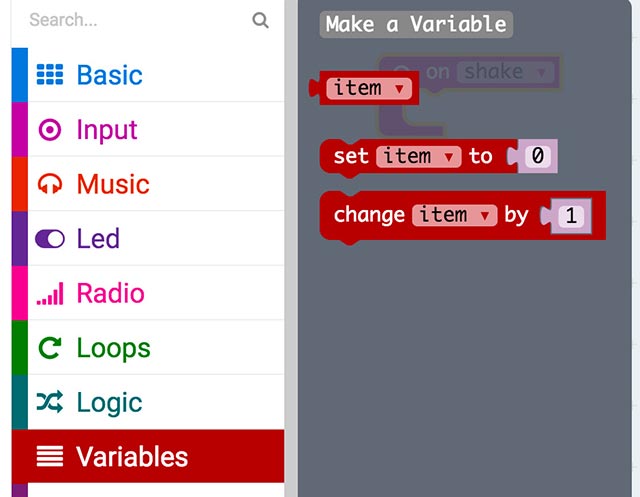
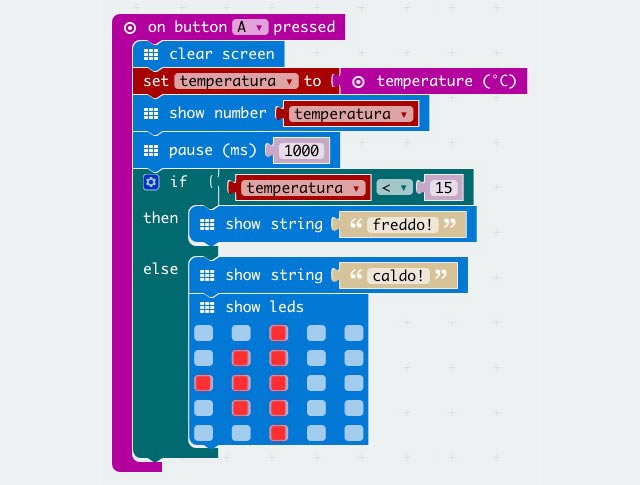
Realizzare un programma che alla pressione del pulsante “A” fa apparire sul display un messaggio: “freddo!” se la temperatura è inferiore ai 15° C, mentre se maggiore di 15° C “caldo!”
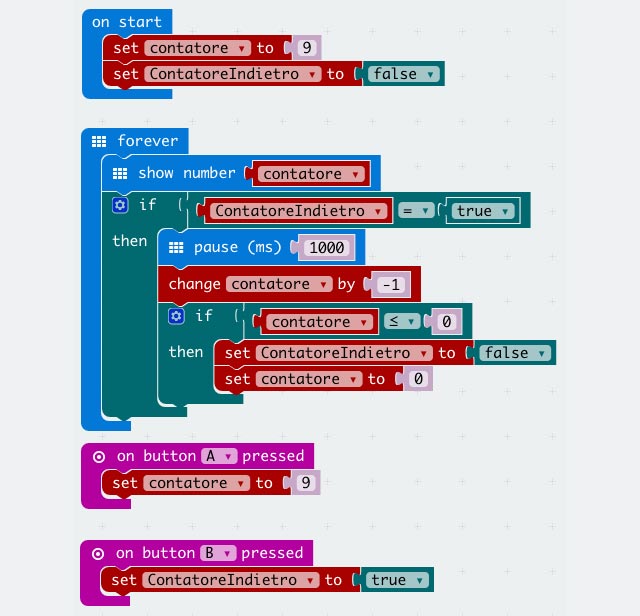
Alla pressione del pulsante “A” viene cancellato lo schermo e memorizzato all’interno della variabile “temperatura” il valore rilevato della temperatura esterna, con “show number” viene visualizzato il valore che persiste sul display per 1000 millisecondi (1 secondo). L’istruzione “if temperatura < 15 then freddo! else caldo!” svolgerà la seguente operazione: SE temperatura < 15 ALLORA stampa la stringa “freddo!” ALTRIMENTI stampa la stringa “caldo!”
Esercizio 2
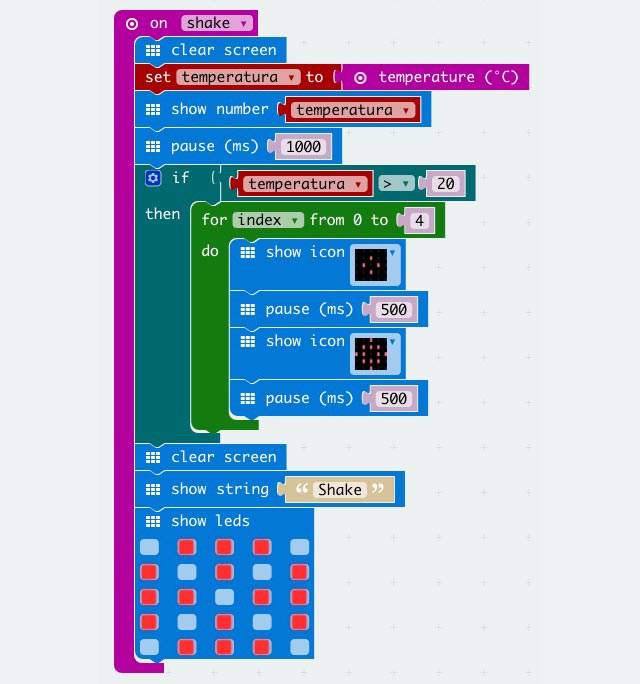
Realizzare un programma che misuri la temperatura e visualizzi un messaggio sul display non appena la temperatura supera un valore di soglia. Il messaggio potrebbe essere anche un disegno che lampeggia per un certo determinato tempo.
Lo svolgimento di questo esercizio è simile al precedente con la differenza che il controllo della temperatura viene effettuato con una istruzione “if condizione then istruzione” in cui non è presente l’alternativa else. Per evidenziare un messaggio di avvertimento, nel caso la temperatura superi i 20° C, viene utilizzata l’istruzione “for..do” che dato una variabile indice che varia da 0 a 4 ripete per 4 volte le istruzioni contenute all’interno del “do“, che nell’esempio è stato realizzato con la visualizzazione di due immagini che appaiono a distanza di mezzo secondo.
Proseguiamo con la lezione 9
Introduzione
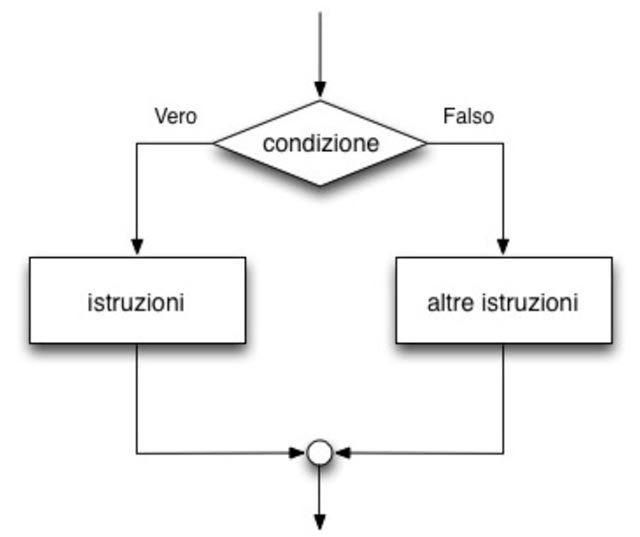
Durante l’introduzione al corso avevo segnalato che il micro:bit è dotato di una bussola elettronica, vediamo quindi in questa lezione come rilevare i punti cardinali: Nord, Sud, Est ed Ovest facendo apparire rispettivamente le lettere: N, S, E, O in funzione di come verrà ruotata la scheda. Per far ciò utilizzeremo l’istruzione “IF condizione THEN istruzioni ELSE altre_istruzioni”
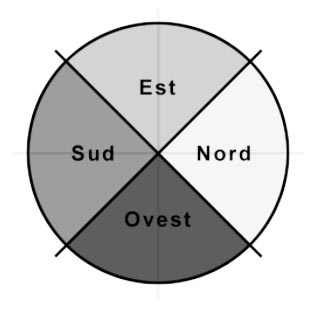
Per rendere semplice la realizzazione del programma limiterò l’individuazione dei punti cardinali ad un intervallo di gradi, selezionerò settori di 90° in cui farò corrispondere:
- da 0° a 45° individuerò il Nord
- da 45° a 135° individuerò l’Est
- da 135° a 225° individuerò il Sud
- da 225° a 315° individuerò l’Ovest
- da 315° a 360° individuerò ancora il Nord
Il controllo della posizione del micro:bit avverrà usando 4 istruzioni annidate “IF condizione THEN istruzione ELSE istruzione”
La simulazione via software della bussola avviene ruotando il logo del micro:bit sulla scheda, così come evidenziato nell’immagine che segue:
Di cosa avete bisogno
- n.1 BBC micro:bit
- n.1 Micro USB
- n.1 Computer o tablet
- n.2 x Batterie AAA ed un contenitore per le batterie (opzionale perché la scheda potrà essere alimentata direttamente anche via USB)
Programmiamo
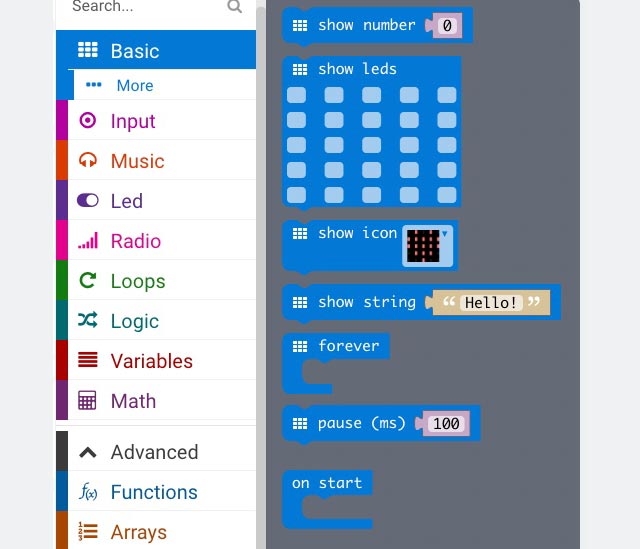
- Inseriremo la totalità delle istruzioni all’interno dell’istruzione “forever” in modo che si abbia un controllo continuo della posizione della bussola.
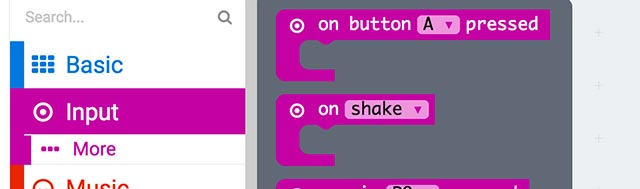
Dal menù “Basic” trasciniamo l’istruzione “forever” nell’area di programmazione
 Continua a leggere→
Continua a leggere→