
Le passeggiate che mi portano a scuola le sto impiegando per ascoltare podcast e per riflettere su progetti che sto portando avanti e dirvi che DotBot mi sta coinvolgendo un po ormai lo sanno anche le pietre 😀 ma cosa ci posso fare mi diverte! Se ciò induce felicità perché non farlo? Sono convinto che il progetto possa essere utile anche ad altri e poi la componente di ricerca è fondamentale per continuare a studiare e trovare nuove soluzioni didattiche, in una sola frase, citando Pierangelo Bertoli, linsegnate dovrebbe avere: “…lo sguardo dritto e aperto nel futuro…”.
Cosa è successo in queste passeggiate progettuali? Come sapete nei mesi scorsi ho partecipato ad un evento che mi ha fatto rivivere dopo alcuni anni il mondo Lego dove la creatività è realizzata incastrando mattoncini incastro quindi è la parola chiave che ho posto in cima allalbero progettuale di questa nuova versione.
In questa fase volevo rendere tutto libero da viti metalliche, esigenza che nasce da questi quattro obiettivi che mi sono posto:
- ridurre parti metalliche piccole in modo che anche i bambini potessero realizzare il robot;
- ridurre i tempi di assemblaggio del robot a vantaggio della programmazione;
- possibilità di personalizzazioni e ampliamento della piattaforma hardware;
- completamente open e gratuito.
Dirvi che ci sono riuscito al 100% sarebbe troppo presuntuoso, ma ho fatto il possibile.
Lanalisi che ho fatto nel progettare questo nuovo modello è stata fatta anche analizzando i competitor anche se in questo caso forse è esagerato parlare di competitor visto che nel caso di DotBot si parla di progetto open e gratuito che non ha il supporto di finanziamenti privati, se non quelli che vengono dal mio portafoglio, ma certamente per farne un oggetto didatticamente interessante bisogna analizzare cosa offre il mercato.
Cosa ho scoperto?
Mi sono accorto che molti progetti sembravano non pensati per la scuola o non pensati da insegnanti sia dal punto di vista estetico che funzionale. Accade spesso che le due caratteristiche sono fortemente sbilanciate, inoltre un fattore non da sottovalutare sono i costi non sempre allineati allo standard scolastico italiano.
Prerequisiti essenziali per realizzare DotBot Click
- avere una stampante 3D;
- munirsi di una buona dose di pazienza.
La stampante 3D è essenziale per la creazione di ogni parte e i costi (filamento di stampa e corrente elettrica) per la realizzazione di tutta la struttura sono bassi.
Per quanto riguarda la pazienza ne dovete avere un po i tempi di stampa totali, per ottenere una buona qualità e solidità delle strutture, sono di circa 15 ore.
La versione che vedete nelle immagini è stata realizzata in bassa qualità ma
Inoltre poiché le varie parti vengono incastrate in binari di larghezza e profondità di circa 2 mm la calibrazione della stampante influisce moltissimo, quindi in fase iniziale dedicate un po di tempo per calibrare la stampante. Ovviamente per piccoli problemi si potrà rimediare usando una piccola lima per smussare ed allargare incastri e nel caso di piccole rotture un po di colla sistema sempre tutto 🙂
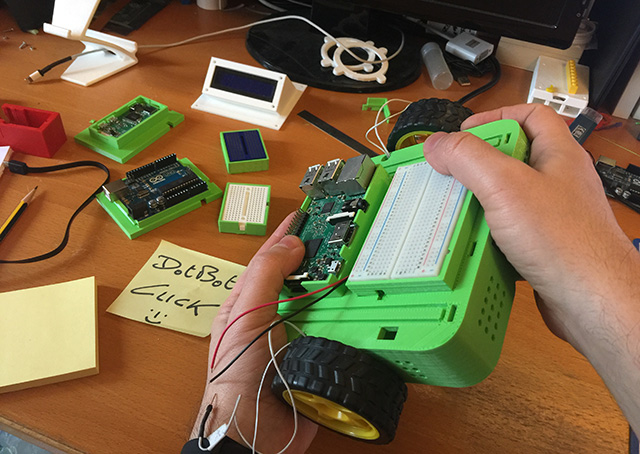
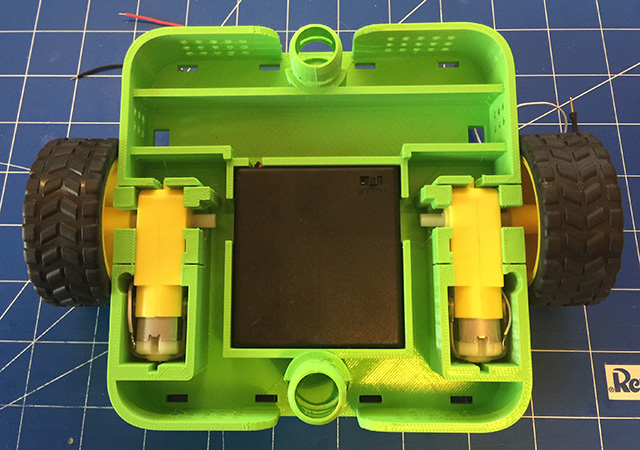
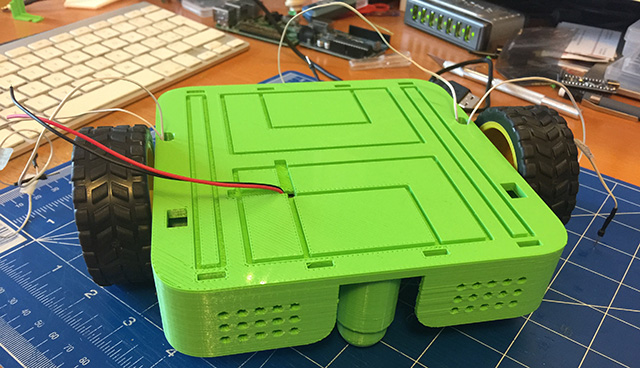
Dal punto di vista estetico ho deciso di semplificare il più possibile ed ho abbandonato (non definitivamente per il futuro) la struttura ad esagono tipica del DotBot preferendo una struttura quadrata e smussata sugli angoli, ciò mi ha permesso di sistemare i motori mantenendo le ruote in asse, caratteristica per me essenziale per lo svolgimento di esercizi con gli studenti. Una tale simmetria non poteva essere mantenuta con una forma ad esagono se non aumentando di molto la superficie totale del robot. Devo dirvi che ho fatto una discreta difficoltà nellaccettare questa soluzione geometrica e mi sono confrontato molto con Ludovico, ma alla fine è solo un fork del progetto sperimentiamo ed andiamo avanti 🙂
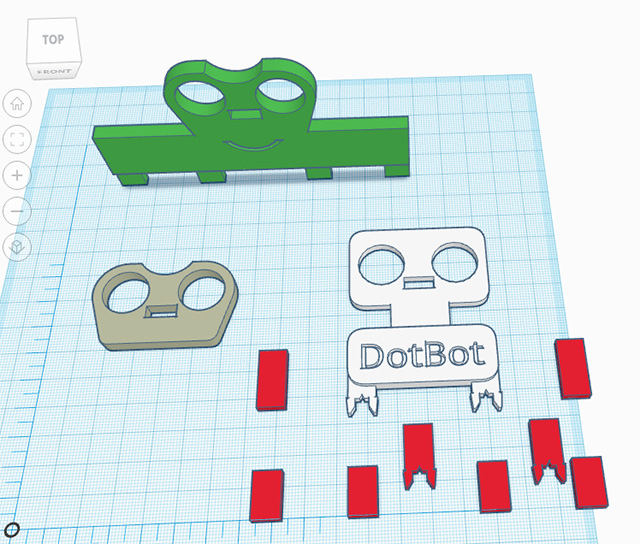
Di seguito limmagine che a colpo docchio vi mostra la totalità degli oggetti, alcuni di questi non è obbligatorio stamparli.
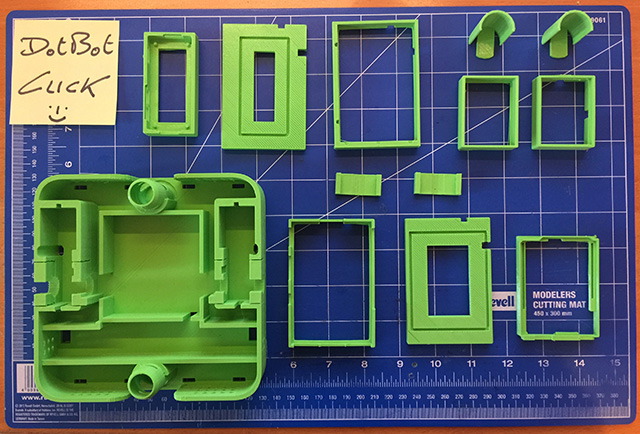
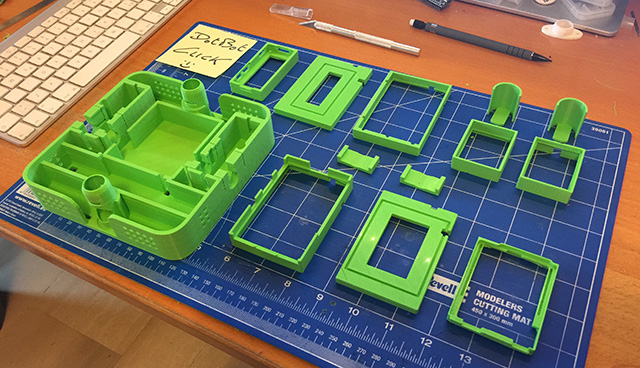
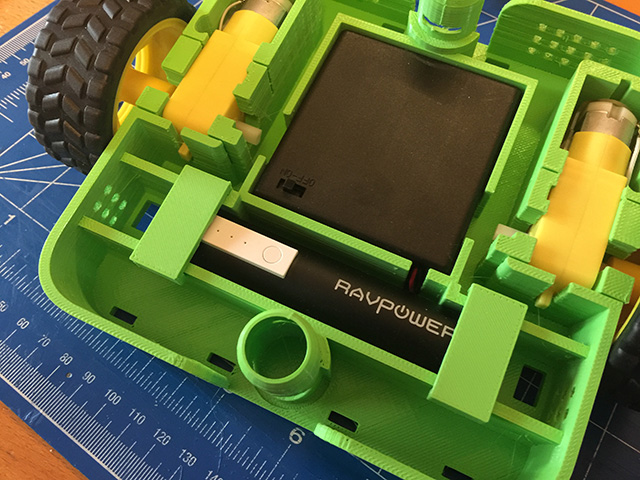
Tutto è ad incastro, motori e batterie e schede elettroniche.
La condizione di partenza è la seguente:

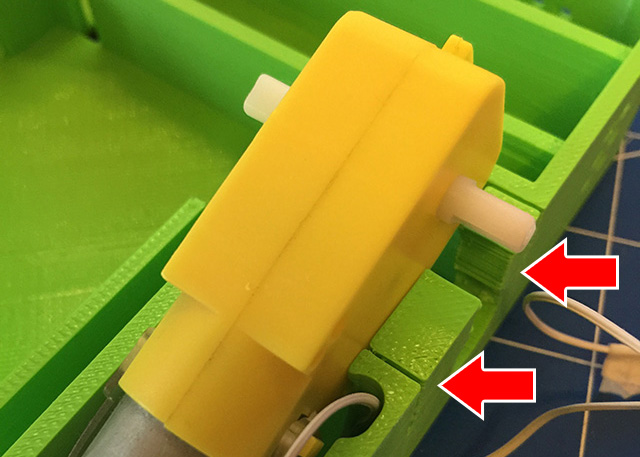
I motori vanno incastrati in uno scatolato, le misure del vano che li ospita sono standard rispetto ai motori in CC, per capirci quelli gialli, che trovate in qualsiasi store cinese.
Attenzione che linserimento deve essere effettuato in maniera delicata, non siate bruschi nellinserimento, bisogna leggermente allargare la parte indicata nellimmagine.
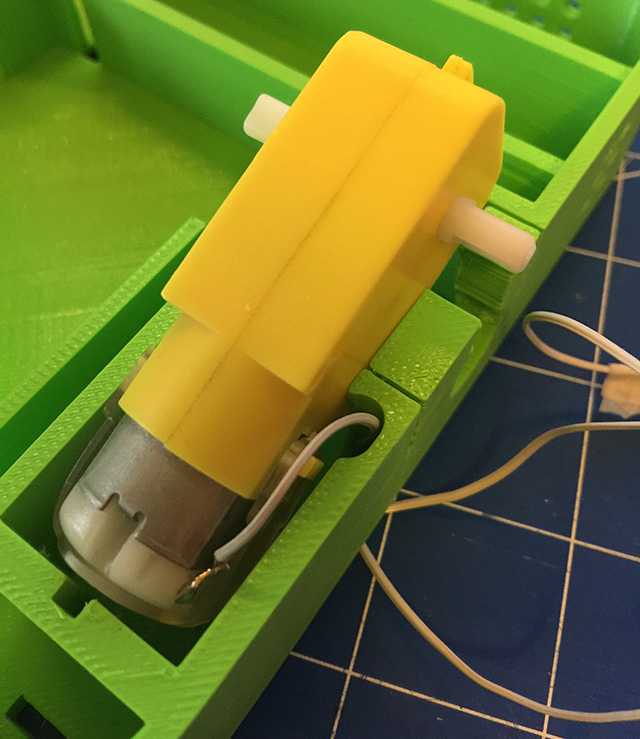
Se la stampa viene effettuata con una percentuale di riempimento troppo bassa i rischi di rottura in questa zona sono probabili, nel caso si dovesse verificare una rottura un po di super colla risolve tutto. Io ho adottato una percentuale di riempimento del 20%.
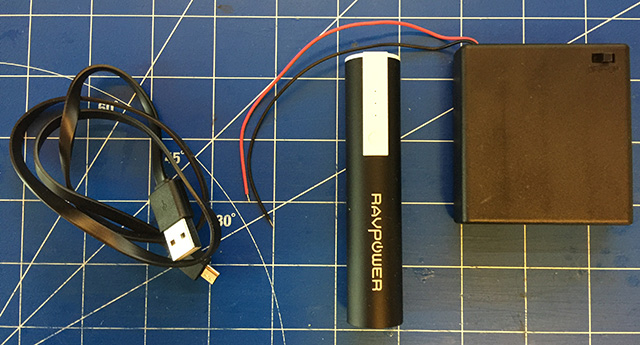
Lalimentazione avviene utilizzando due pacchi batterie:
- un gruppo con 4 batterie di tipo AA alloggiate in un contenitore munito di interruttore e ci servirà per alimentare i motori del robot
- una batteria ricaricabile per alimentare le schede elettronche, io ho utilizzata questa che potete acquistare direttamente su Amazon.

Nel caso servisse e notate che la batteria non è stabile potete utilizzare due blocchi:
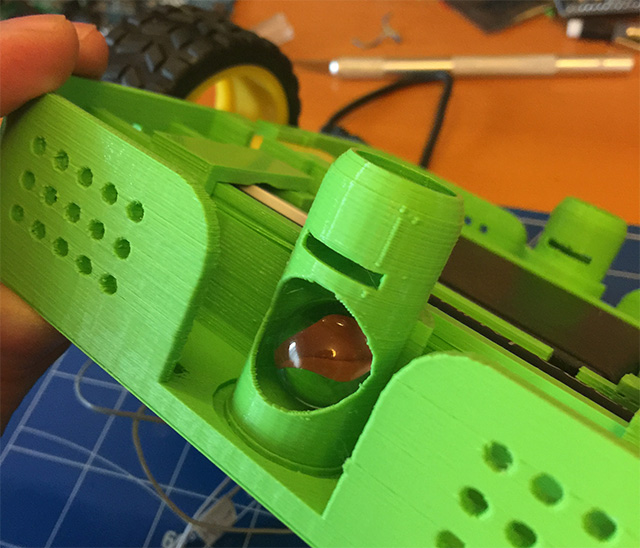
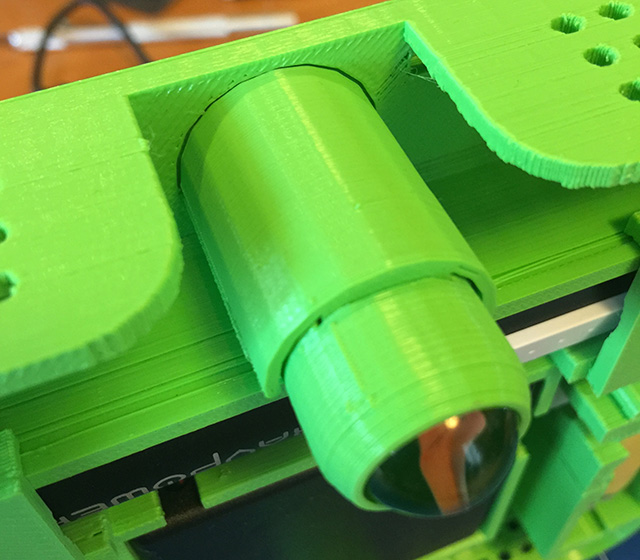
Uno dei problemi più grandi che ho dovuto superare è quello di trovare una soluzione free screws per le ruote caster, le biglie di ferro o di vetro che servono per mantenere in equilibrio il robot.
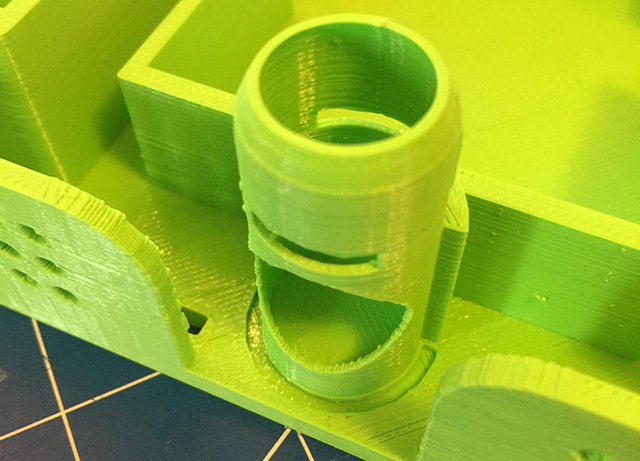
Ho realizzato a tal scopo un cilindro in cui poter inserire una biglia di vetro di diametro di 16 mm che viene mantenuta in posizione (con un certo grado di libertà) mediante un tappo ad L.
La struttura caster, come si vede nellimmagine che segue è stata rinforzata in modo da sopportare eventuali urti. Il tappo che evita la fuoriuscita della biglia di vetro si incastra mediante un incastro curvo.
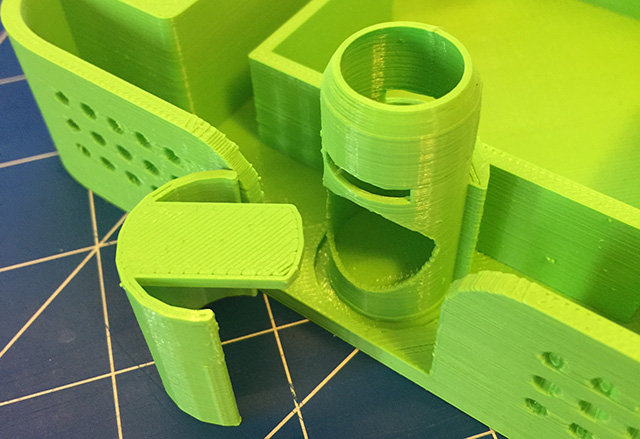
Attenzione che il tappo si blocca precisamente e nel caso voleste toglierlo potreste fare una certa difficoltà, nel caso di rotture nessun problema, la stampa di un nuovo tappo richiede non più di 15 minuti.
Inserite la pallina di vetro:
Girate in senso opposto la struttura per far cadere verso il basso la pallina:
Inserite il blocco:
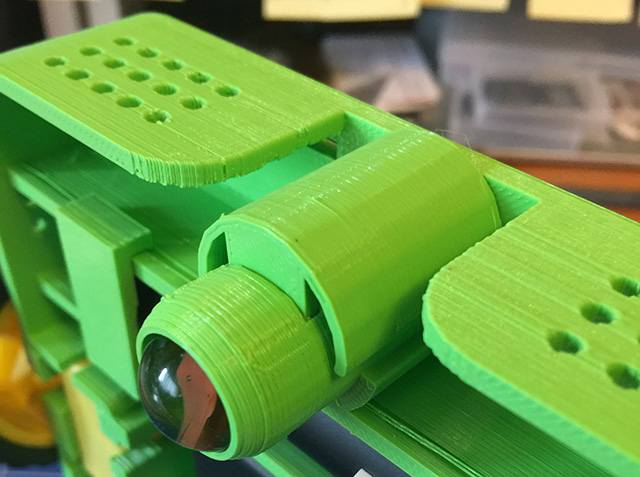
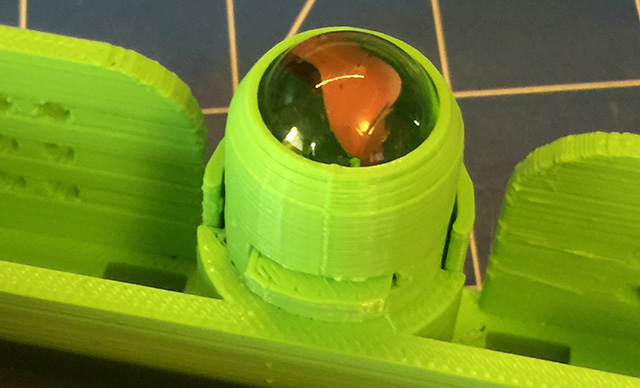
La struttura resterà in equilibro:
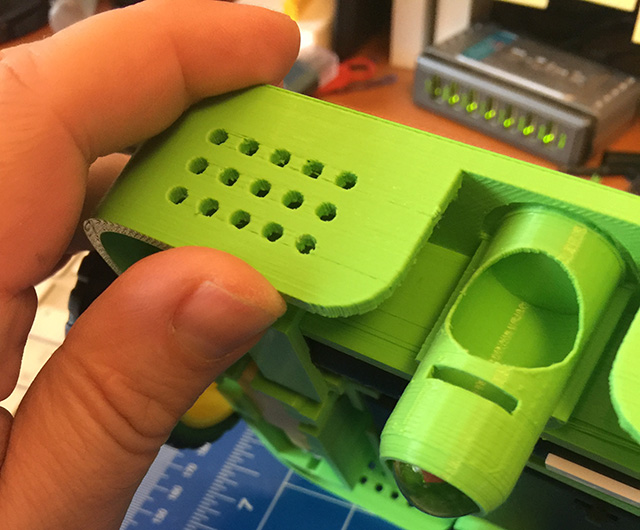
Come potete notare il robot è dotato lateralmente di una rete di fori da 3 mm di diametro per permettere a chi lo desidera anche estensioni da effettuare con viti 🙂
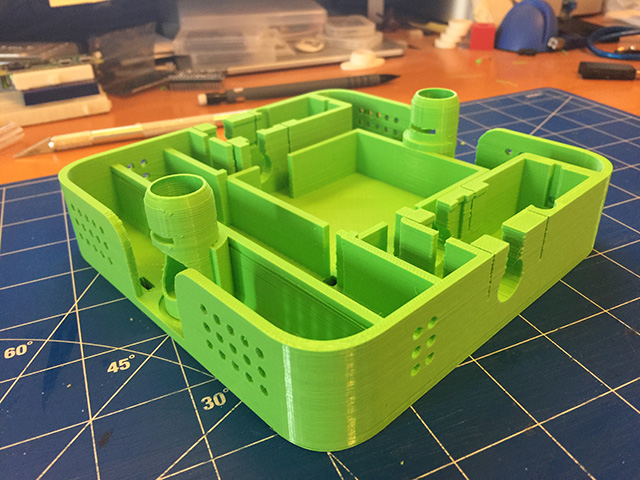
.ho mica detto che odio le viti chi proprio non ne può fare a meno può sfruttare queste aree per agganciare i propri dispositivi.
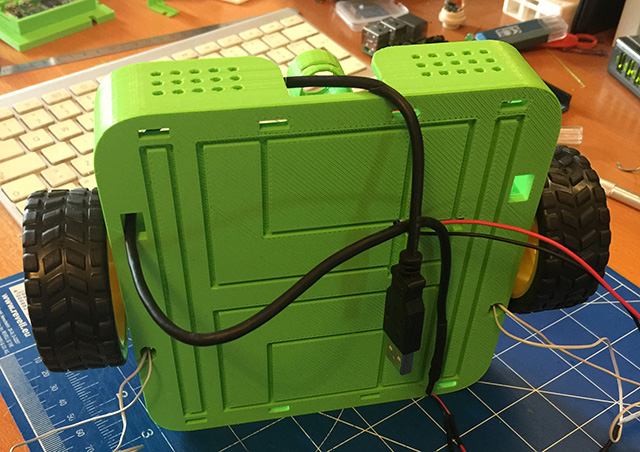
Nella parte superiore abbiamo una serie di fori, lateralmente due asole da cui fuoriescono i fili dei motori e due fori di forma rettangolare sufficientemente larga per far fuoriuscire il cavo USB provenente dalla batteria cilindrica. Il foro quadrato da cui partano due solchi permette la fuoriuscita dei cavi provenienti dal pacco batterie. I binari laterali da utilizzare per incastrare strutture aggiuntive create dagli utenti.
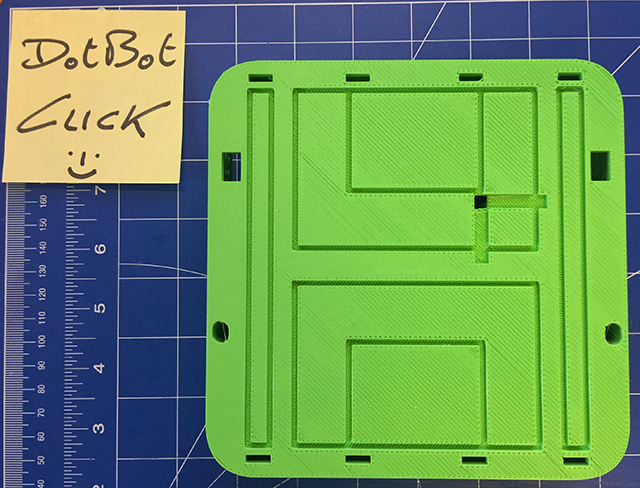
4 fori rettangolari da utilizzare per agganciare ulteriori strutture come ad esempio dei supporti per sensori ad ultrasuoni:
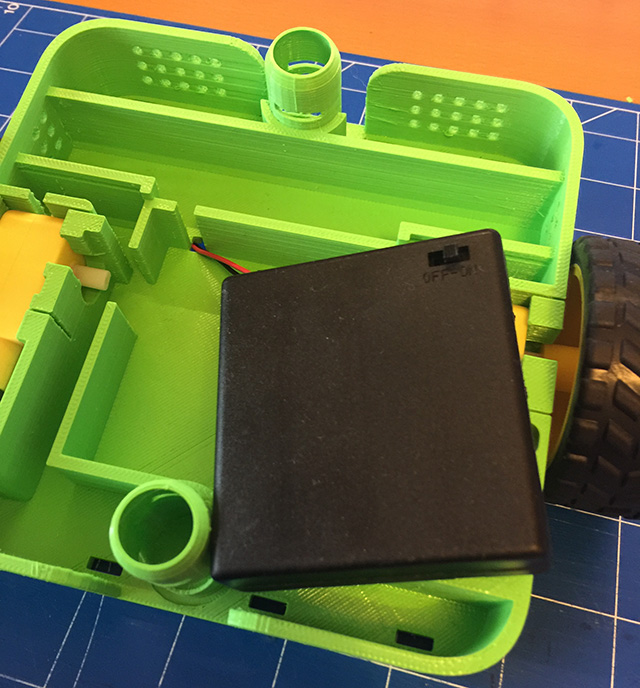
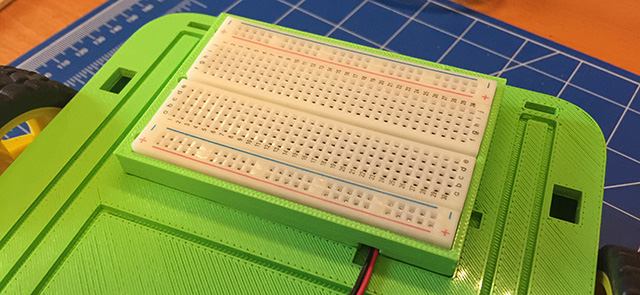
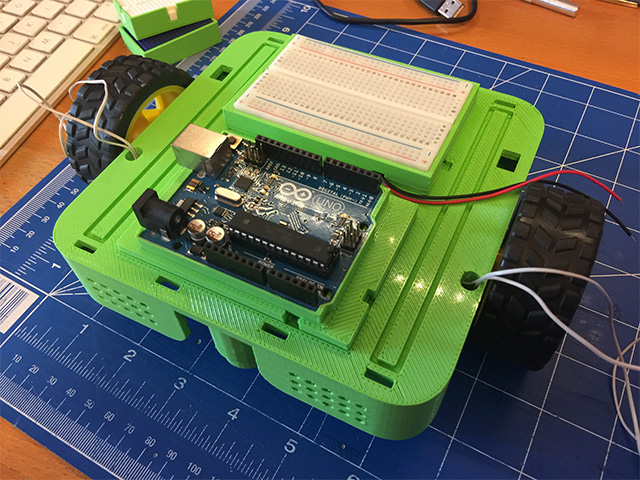
Essendo la struttura del robot simmetrica potete decidere voi in quale zona collocare le schede e la breadboard, ma poiché da una sola parte fuoriescono i cavi di alimentazione provenienti dal pacco batterie AA tutte le strutture di incastro permettono di essere ospitate anche nella zona in cui fuoriescono i cavi di alimentazione.
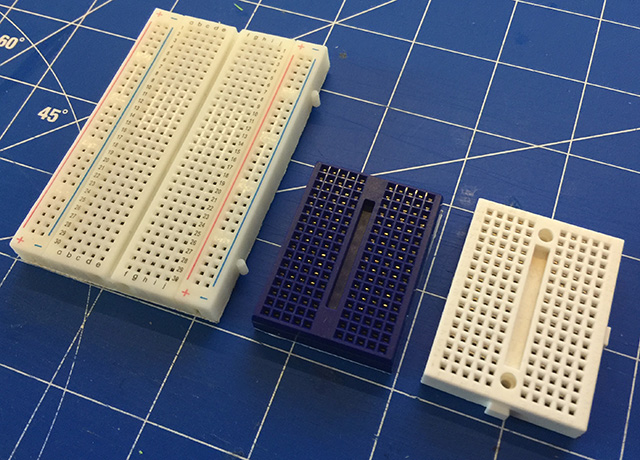
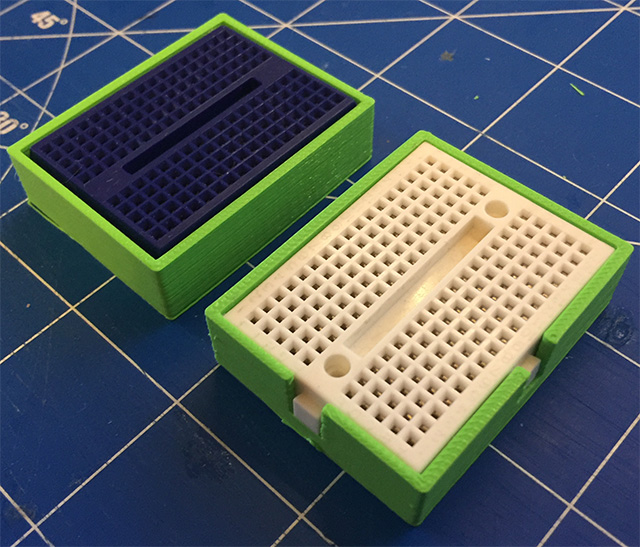
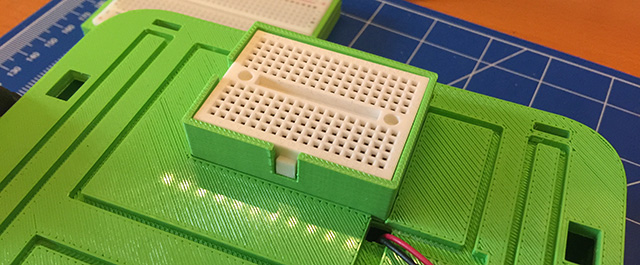
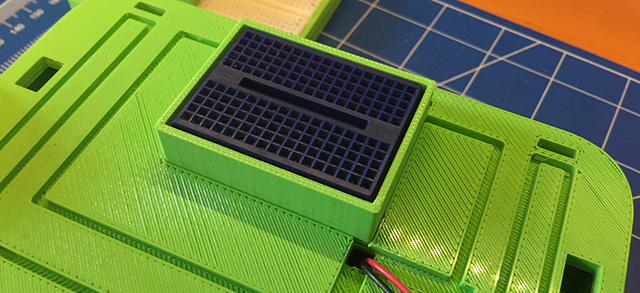
In commercio esistono diverse tipologie di breadboard e per questa struttura robotica ho pensato allutilizzo di una breadboard da 400 punti e breadboard mini.
Esistono due tipologie di breadboard mini, una di queste dispone di due incastri laterali quindi ho disegnato due strutture diverse per queste breadboard.
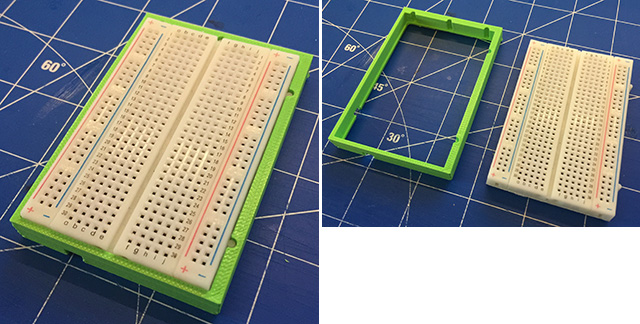
Ho predisposto le cornici che ospitano le breadboard e che andranno ad essere incastrate nella struttura principale:
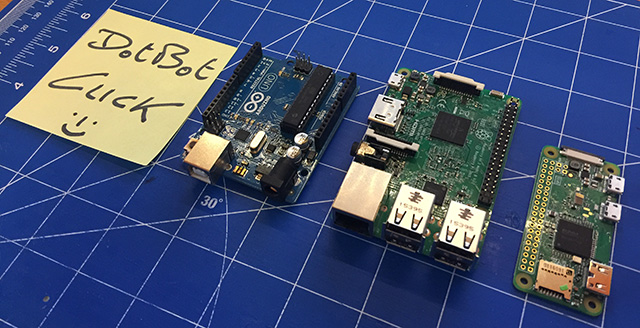
Potete utilizzare il robot con schede:
- Arduino UNO R3
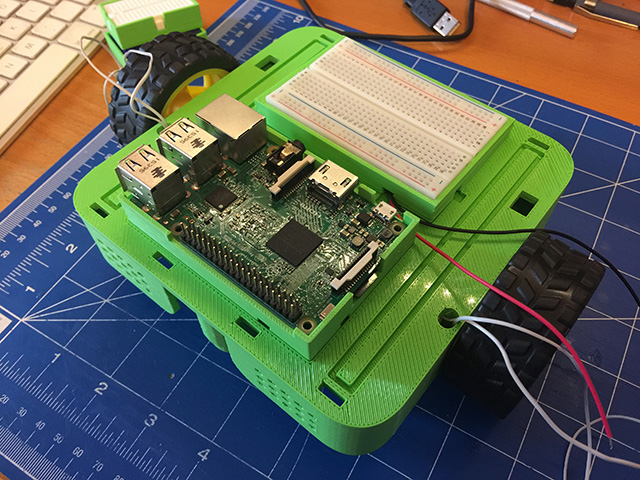
- Raspberry Pi 3
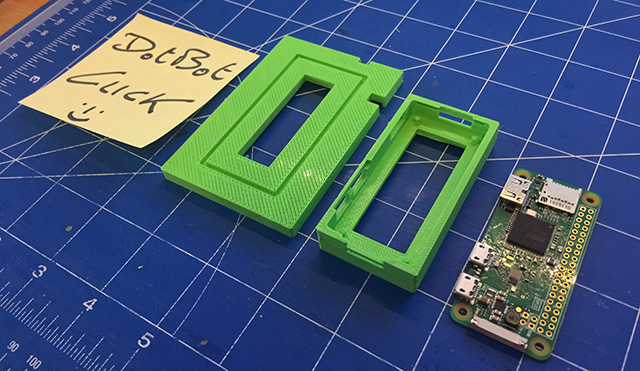
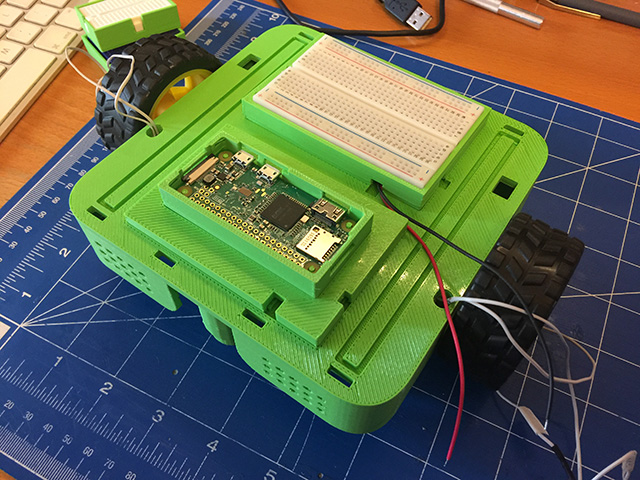
- Raspberri Pi Zero W
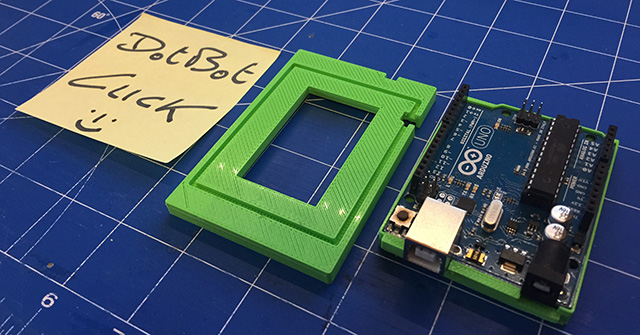
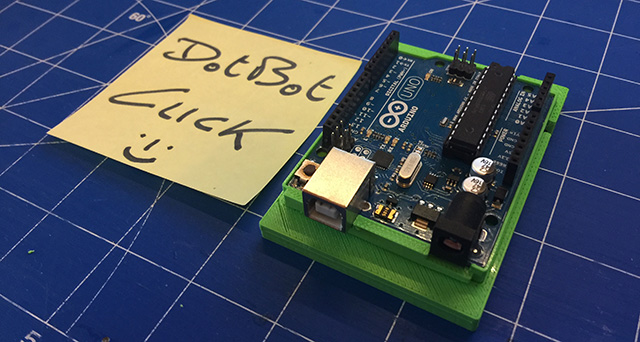
Alloggiamento per Arduino UNO R3
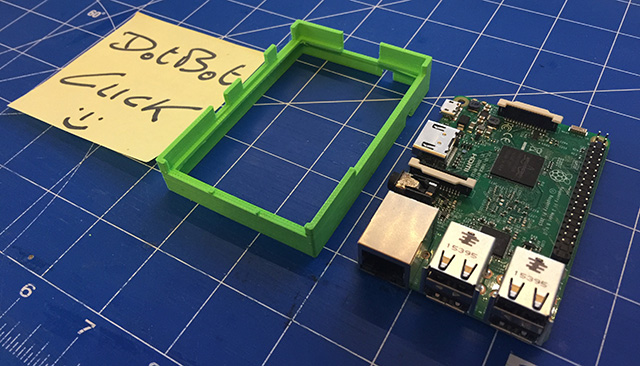
Alloggiamento per Raspberry Pi 3

Alloggiamento per Raspberry Pi Zero W:


e se avete necessità di altro, fate voi e disegnate 🙂
Cosa aggiungere al robot? Nullaltro se non la vostra creatività.
Cosa accadrà ora? Coding e divertimento e estensioni hardware per aggiungere telecamere e sensori di ogni tipo
Attenzione, poiché mi piace una vita in beta version 🙂 potrebbero esserci correzioni ed evoluzioni potreste trovare qualche errore o soluzioni alternative e se così sarà per favore condividete io andrò avanti aggiungere altro al progetto.
Per prelevare i sorgenti STL per la stampa seguire il link Dotbot-io su Thingiverse.
Ma cosa accadrà in futuro?
Vi ricordate il DotBot K?
Si sta trasformando in qualcosa di estremamente mutevole
un assistente robotico e non solo vedremo 🙂
Buona sperimentazione a tutti.